The first two articles caused a large number of questions and skeptical comments to which I will answer in this. All data used in this article are the result of test analysis and calculations of the general theory of flight of the flywheel.
1. Why is it needed? Is it effective?
The effectiveness of any vehicle can be assessed only under the conditions of a similar task, similar characteristics, and only comparatively.
For example, if we take the characteristics of our model and compare it to our classmates in take-off weight (
the Crow 333 and
Dozor-50 helicopter), without even comparing the transportation problem, it is obvious that it is
not effective compared
to , simply because of the small payload which is capable of carrying (5 kg). Therefore, yes, the model shown on the video is not effective, and I will say more, it was designed exclusively as an experimental stand designed to demonstrate the implementation of a flapping flight and study its features, therefore, it is naive to expect quality indicators from it.
Is it possible to make an effective flywheel? To answer this question should consider what we have already gained.
- Mechanics and inertia. A crank drive with a crank drive is not possible to create a mass of more than 40 kg. It is easy to prove: the fact is that the transfer of forces to the wing in the case of a crank mechanism is such that at the extreme points of the trajectory the wing has tremendous energy which is extinguished by the deformation of the hull and wing. Overload on the wing tip at the same time reaches 20g. All this affects the resource and strength, which means weight. At the same time inertial loads grow in proportion to the fourth degree of the linear size, the strength is proportional to the second, and this means that these curves have an intersection point after which the flywle is simply impossible to build. Those. The crank drive is not at all suitable for maholettes, therefore you need to look for other ways to make flapping movements more energy efficient, we will try to implement this on a new model. The implementation of the new drive will make it possible to estimate how efficient the flywheel can be from an energy point of view, i.e. What is the efficiency of this type of drive and can it be interesting from the point of view of commercial exploitation? The second task of the new drive is the proof that it is possible to remove the barriers associated with negative inertial effects, namely, to make a manned flywheel. And the third task is to minimize the vibrations and vibrations, i.e. will maholets be comfortable for people.
- Aerodynamics and dynamics. Here everything is much more complicated. To figure out how to increase aerodynamic efficiency, you need to understand how exactly the aerodynamic forces are created by the wing of the flywalk, and in the absence of wind tunnels, smoke stands and strain gauges, this is not easy, so the new model provides the ability to change a large number of parameters of the swing for the selection of angles and frequencies for each flight mode. But now it should be said that the flywalker has not bad aerodynamic characteristics: quality K = 10-12, Cy reaches 4 at high angles of attack.
Those. potentially makholet can be made sufficiently effective if it is possible to make energy-efficient reliable drive and maximize the use of the aerodynamics of the flapping wing. This we will do on the new model.
2. Where is the old model, is it possible to see it and what is this story with prof. Kiselev?
I will briefly tell the full story of how we built the maholet.
I built my first maholet at 12 years old. By 16 I came up with a scheme with which with consoles moving in antiphase. As found out later, this scheme was used by Kiselev V.A. and Toporov V.M.
In 2004, I entered the MAI, where fate brought me together with the distinguished professor Kiselev VA, who was involved in maholettes. I started working for him to collect a 22kg model, since I was very interested in this topic, and besides, I was a good modeller.
Work on the model was carried out from 2005 to 2010 by different teams, I was one of them, others were not. But the result of all attempts was the same - the model made jogs, but did not show any hints of flight. And she broke down with disastrous constancy. Nodes enough for a maximum of 2-3 runs. At the same time, the project manager did not make any changes to the model.
In 2011, Valentin Afanasyevich finds another sponsor and he hires me and Shuvaova D.G. for work on the project. We have been doing the same thing for the past 5 years. As a result, the sponsor decided to abandon work on this project. He takes a model built on his money. After some reflection, we decided to offer the sponsor for the minimum fee to make the model as we saw it right. As a result, after half a year we make the first uncertain flight - the model is poorly controlled and does not gain altitude. Due to our inexperience, we decide that the matter is in aerodynamics and proceed to the creation of sectional wings.
The most amazing thing is that we managed to realize the work of sectional wings with a sufficiently high reliability, however, we were faced with the fact that the drive could not cope either. At first we sinned on aerodynamic loads. But later, by the nature of the crank deformations, we found out that it was all about inertia. Those. for a long time we were based on the theory of prof. Kiselev (proved by the way) that the maxima of aerodynamic and inertial forces are at different points of the wing trajectory and are not summed - this turned out to be fundamentally wrong - they are summed up and how.
In this regard, we revised the design of the wings and the drive and tried to minimize inertial loads. In the end, we returned to the starting point. The device broke away, but was not controlled and did not want to gain altitude. After several tests with different angles and frequencies, we were able to find out what the reason was - in the dynamics, and more precisely in the aerodynamic focus of the flywheel's wing. He was not where he was supposed to be. Hence the lack of controllability. As a result, we refined the model according to our calculations and we finally managed to realize the flight. Those. most of the theories of prof. Kiselev was not true. Starting from the optimal angles of flight and ending with the dynamics. Nevertheless, the theories of the professor gave a basis, though not a true one, from which we could push off, for which he was greatly thanked and respected.
According to the test results, we assured the sponsor that deep studies of aerodynamics, dynamics and flight mechanics are required to move on, but he wanted to go straight to building a manned vehicle. Of course, we refused to participate in this madness. As a result, the model remained with him, and we still have experience.
For two years I tried to solve the problems that emerged in the design of the flywheel and in parallel gathered a team of engineers for the implementation of various projects.
In the end, as it seems to me, I managed to find a solution to all the contradictions. A company was built on Bumstarter to build the model, but it did not yield any results.
As a result, our team decided to develop the model on its own with minimal involvement of third-party funds. What we are now and implement.
3. What am I doing in the geek community?
I will say straight away - there is no desire to promote. There is a desire to find people who want to participate in the project or to study the topic seriously.
We also need good millers and turners. I will not refuse if someone tries to make a flight of the flywheel using the FEM in FLUENT or any other program. I will be happy in two ways if someone undertakes to understand aerodynamics, my calculations and theories - use materials for writing candidate’s and diplomas - it’s not a pity.
I am a designer, not an aerodynamic speaker, not a speaker, not an economist - all I need are these industries only to figure out whether a flywalker has a right to exist or is nothing more than a toy. Therefore, the level of my qualifications in these industries is exactly the same in order to understand the fundamentals and principles.
4. How does it fly?
The easiest way to answer this question is:
Imagine the trajectory of the screw - it is a spiral. Since the propeller pulls the aircraft behind itself, its spiral is more compressed than the full pitch of the propeller.
Now let's take and unwrap the spiral and fold it so that it represents a harmonic.
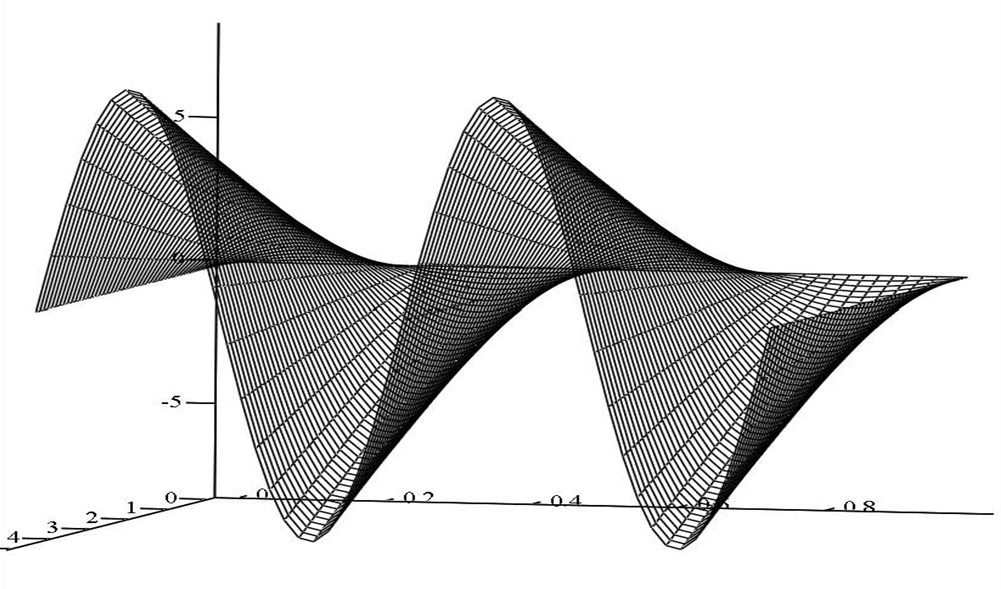
Then it turns out that with the help of the plane we are able to create both pulling force and lifting force at any moment of the trajectory, but with different absolute values. For example, when lifting up the wing creates more lift, and when lowering down - thrust.

Those. the ideal wing of the flyworm must have an optimal angle to the flow in each section, or at least be in the stationary flow zone. But in the case of rigid wings, only a small zone, depending on the speed of the apparatus, is in the stationary flow zone, while the larger part of the wing is in the zone of stall flow. And now if we calculate the indicators of lift and thrust for a rigid wing moving in harmonics, it turns out that such sweeps create resistance more than thrust, i.e. According to classic aerodynamics, our model cannot fly. It should spend most of the energy on the useless creation of vortices. However, it flies. Therefore, we made an assumption that, due to the uneven movement of the wing, the effect of a local increase in air viscosity occurs and the breakdown is delayed to angles of 40-50 degrees, reaching Cy = 5-7. However, this is only a hypothesis. Further research may show how true it is.
Now to the criticisms.
“Why do this and it’s so clear that this is complete nonsense.”
Here the answer is simple - the topic is not plowed, suddenly buried in it, then what no one expects.
You see, non-stationary aerodynamics are not quite predictable, but our data show that the wing of the flywright is almost entirely in a non-stationary flow, without signs of laminar blowing, and the size of the vortices is very different in scope. At the same time, the flyer flies and not to say that it is absolutely terrible. Perhaps in the aerodynamics of the flywalk lies the key to improving the aerodynamics of all aircraft. In any case, like any little studied topic, waving flight is very interesting.
“We need to do everything differently”
If you are able not only to give birth to an idea “as needed”, but to describe it mathematically, calculate and show its consistency based on well-known laws - we will be very happy and ready to embody your ideas.
"This is not science, this is a toy."
We do not claim the title of scientists, so let it be just our hobby - makholotostroenie.
Thanks to everyone who was not indifferent to the topic, as soon as we have the data on the new model - be sure to share. If someone wants to join the project - write in a personal.