 The stars, galaxies and clusters shown here are bound by gravity and will not expand with the Universe.
The stars, galaxies and clusters shown here are bound by gravity and will not expand with the Universe.The expansion of the universe has a long and striking history. When Hubble first noticed the relationship between the distance from us to the galaxy and the redshift of its light, he immediately realized that these were the consequences of Einstein’s general theory of relativity. When Hubble announced his discovery, Einstein immediately abandoned his cosmological constant — the “foolish factor” designed to keep the Universe static — and called it his greatest blunder. But as the space between galaxies expands, atoms, people, and planets retain their size. What determines this? Our reader wants to find out:
What is meant by the scale of size, when it comes to the expansion of the universe? Does this mean that the Planck length is nonconstant? Do the orbits of the atoms grow with this stretching of space or is this a strong interaction hindering this?
 Model of the growing universe "bread with raisins", where the relative distances increase with the expansion of space (test)
Model of the growing universe "bread with raisins", where the relative distances increase with the expansion of space (test)The expansion of the universe is difficult to imagine - because it is not at all intuitive. The best analogy, perhaps, would be to imagine the fabric of space in the form of a lump of dough suspended in an oven at zero gravity. When baking, bread fits yeast and expands evenly in all directions. But this is an analogy for empty space. What if you wanted to imagine a space in which there is matter: protons, atoms, people, planets, galaxies, clusters? There are two ways to imagine this extension.
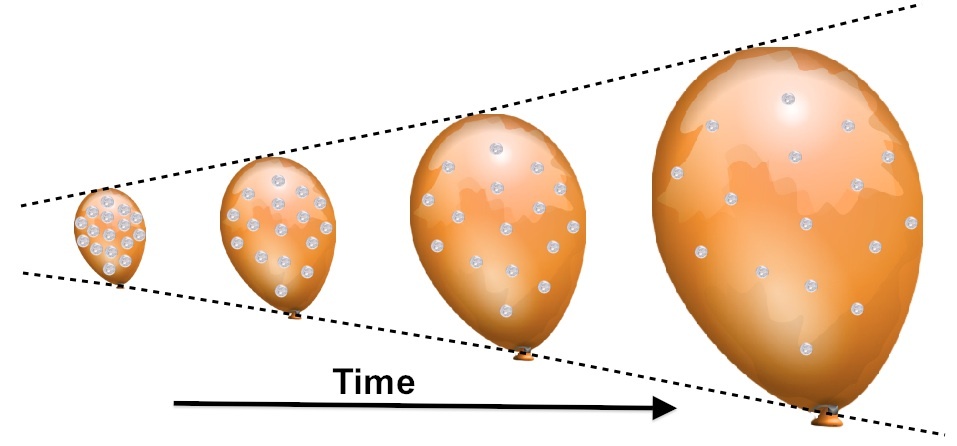
One is the surface of a ball with coins glued to it. Coins do not change, and the ball is inflated. The universe is getting bigger, and the whole space between individual particles — or individual galaxies — is also growing. It seems that the coin is moving away from its neighbors at a certain speed, and a coin located two times farther away will be twice as fast. And each coin will see the same thing: the perceived speed and redshift (stretching) of the light will depend solely on the distance from the coin to which you are looking. This is what is happening with us, and this has been known since the 1920s. It is this relationship that exists in the universe, as Hubble’s law has shown us.
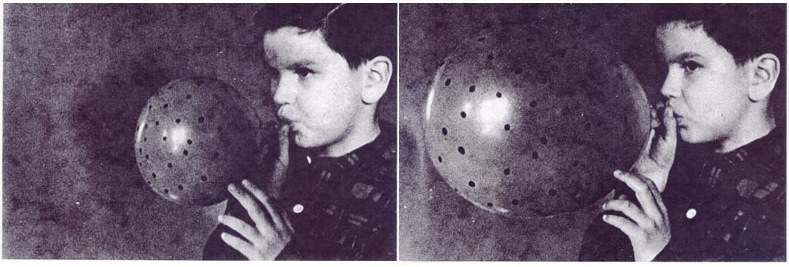
Another way to imagine an extension is to take a ball on which objects are drawn. When the ball is inflated and stretched, the surfaces expand and the marks are painted. Of course, distant objects will move away in accordance with the Hubble law, but in our case they themselves will swell along with the fabric of space.
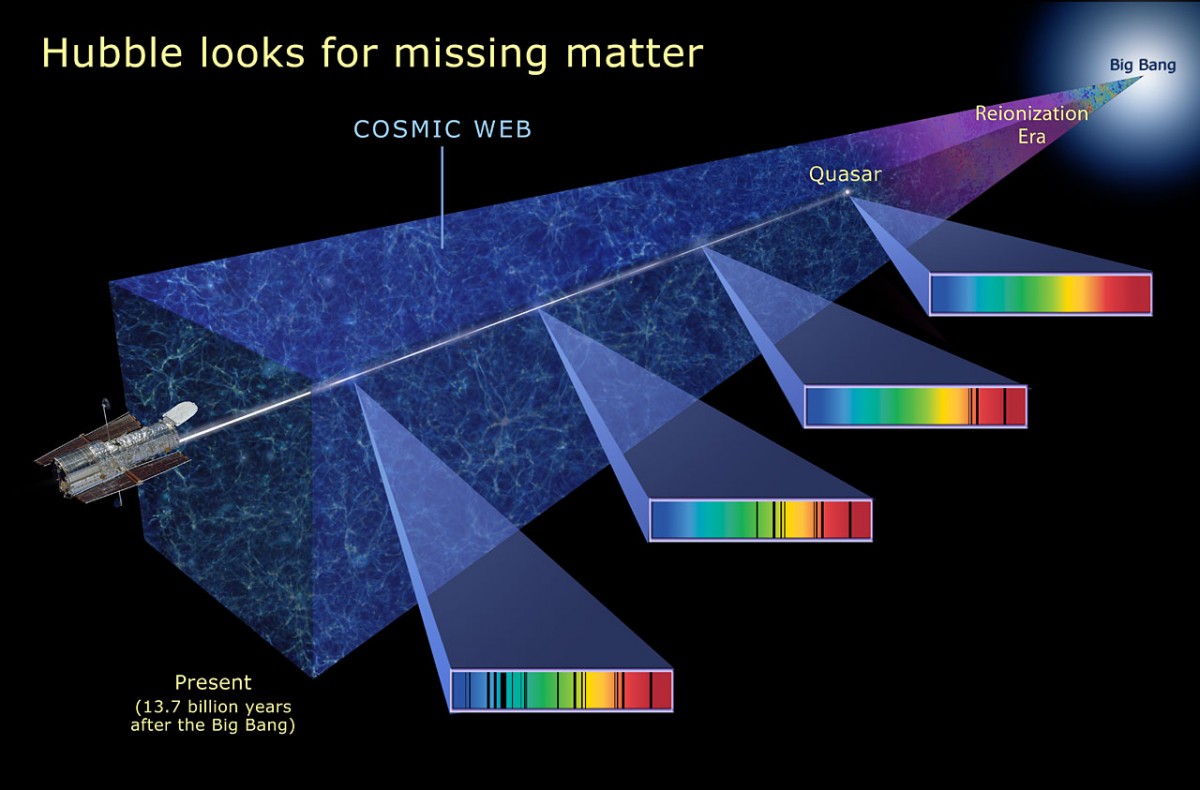
So what happens in the universe? At what scale does the space expand? We can, first, explore the universe itself. Observing distant galaxies, we have to register the redshift and decrease in their mass, because the farther the galaxy, the earlier it appeared.
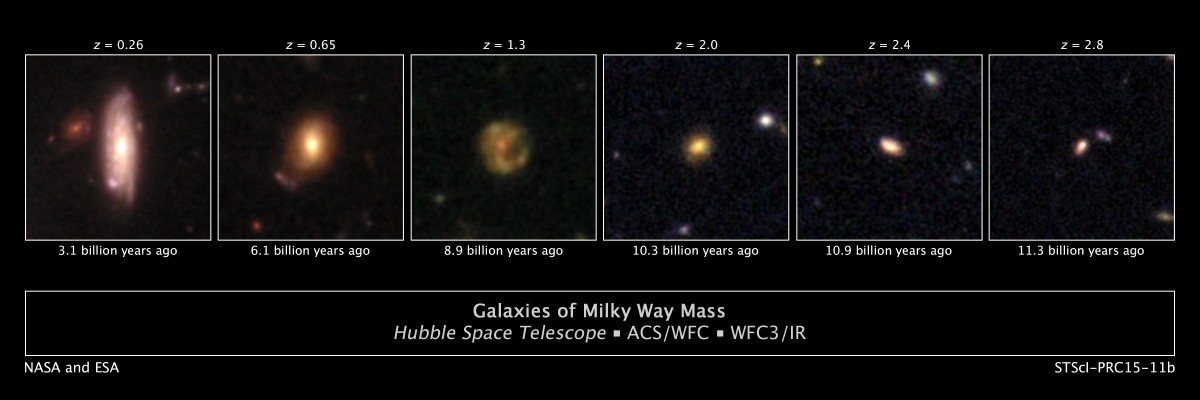
We see this, but you also see other important features:
• Galaxies with a large redshift have the same lines of the spectrum - and this means that the properties and sizes of atoms that existed billions of years ago do not differ from today.
• The physical size of galaxies is determined solely by their mass. The galaxies of the same mass, both old and new, have the same size.
• The principle of the formation of space networks (large-scale structures) depends only on the amount of available mass in a certain part of space.
It turns out that the analogy with the coins will be closer to us than with the paint. Observing the Universe, we see that the fabric of space expands always, unless it is interfered with by another force, which tightens objects together. This fully fits into the theoretical base, because, despite popular opinion, expansion is not force, but speed. When something is connected together, it becomes unimportant what force binds it, whether it is nuclear force in protons and atomic nuclei, electromagnetic force in atoms, cells and people, or is it gravity in the case of planets, stars, galaxies and clusters.
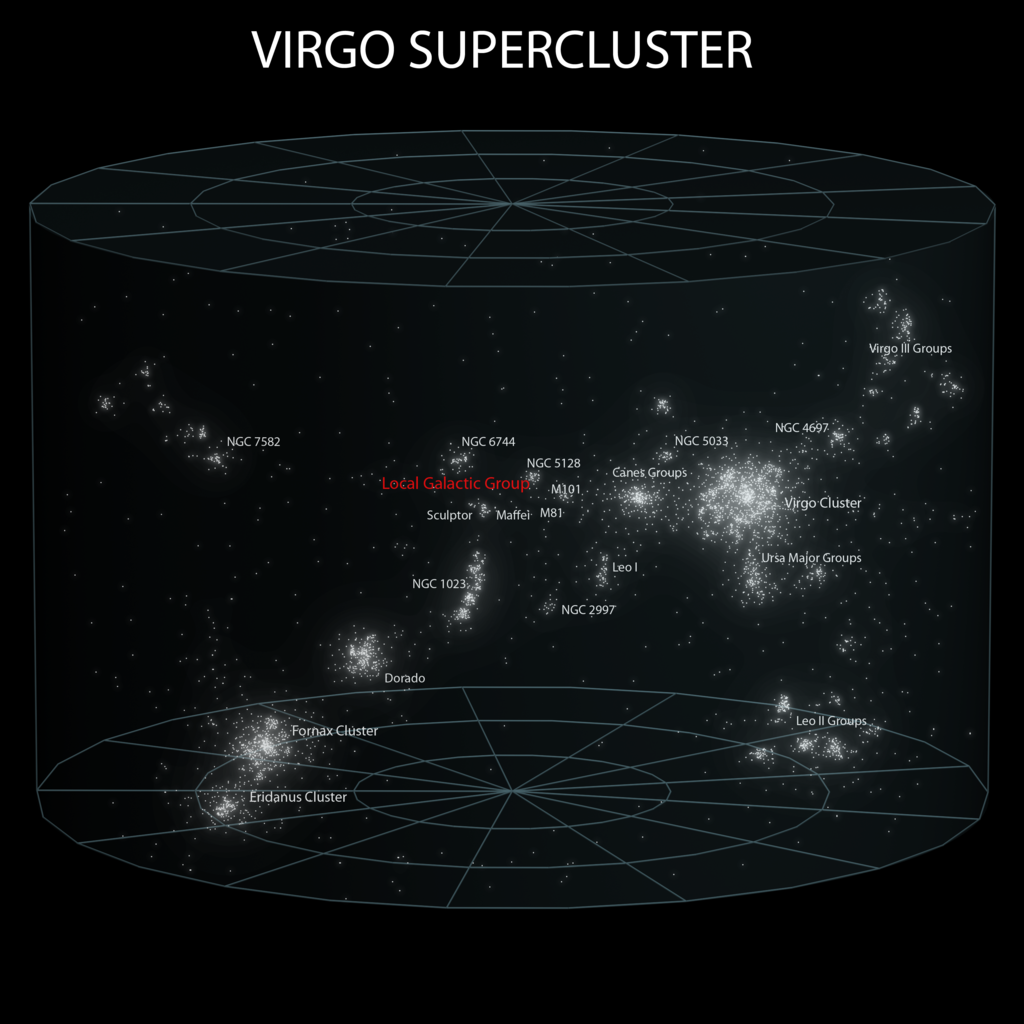
 Veronica's Hair Bundle
Veronica's Hair BundleAlthough the fabric of space expands on its own, it expands at a certain speed per unit length. (In fact, it is a value with the dimension of inverse time). Approximately it turns out that if the force between the two objects causes them to attract more quickly than the space between them increases due to the expansion of the Universe, but they already turn into “coins” rather than “paint”. Our bodies are connected together, each atom is connected together, the local group of galaxies are already connected together, and even all the clusters of the Hair of Veronica are connected together. But it is important to remember that everything is relative. The expansion of the Universe does not affect our local group and everything inside it, because our local group is too tightly connected - but go beyond it, and the space will continue to expand. That is why distant galaxies and other related structures are moving away from us, although they are all locally attached to their own part of the cosmos.
But we can go in search of arbitrarily small regions of space where there is no such connection, where there is no matter, and we find that a region of any size — several light years, kilometers, microns, proton diameters or Planck lengths (or even less) —expands according to the Hubble law. The rate of expansion of space in GR allows us to consider the fabric of space as if it is completely continuous and does not need to be quantized, as in quantum physics. This remains true for the expansion of the Universe exactly as long as you do not put a related structure in it! There is no fundamental restriction on how small a section of space can be, expanding at the same time, but for this to happen, it must be either empty or large enough so that the existing structure cannot overcome the expansion.