
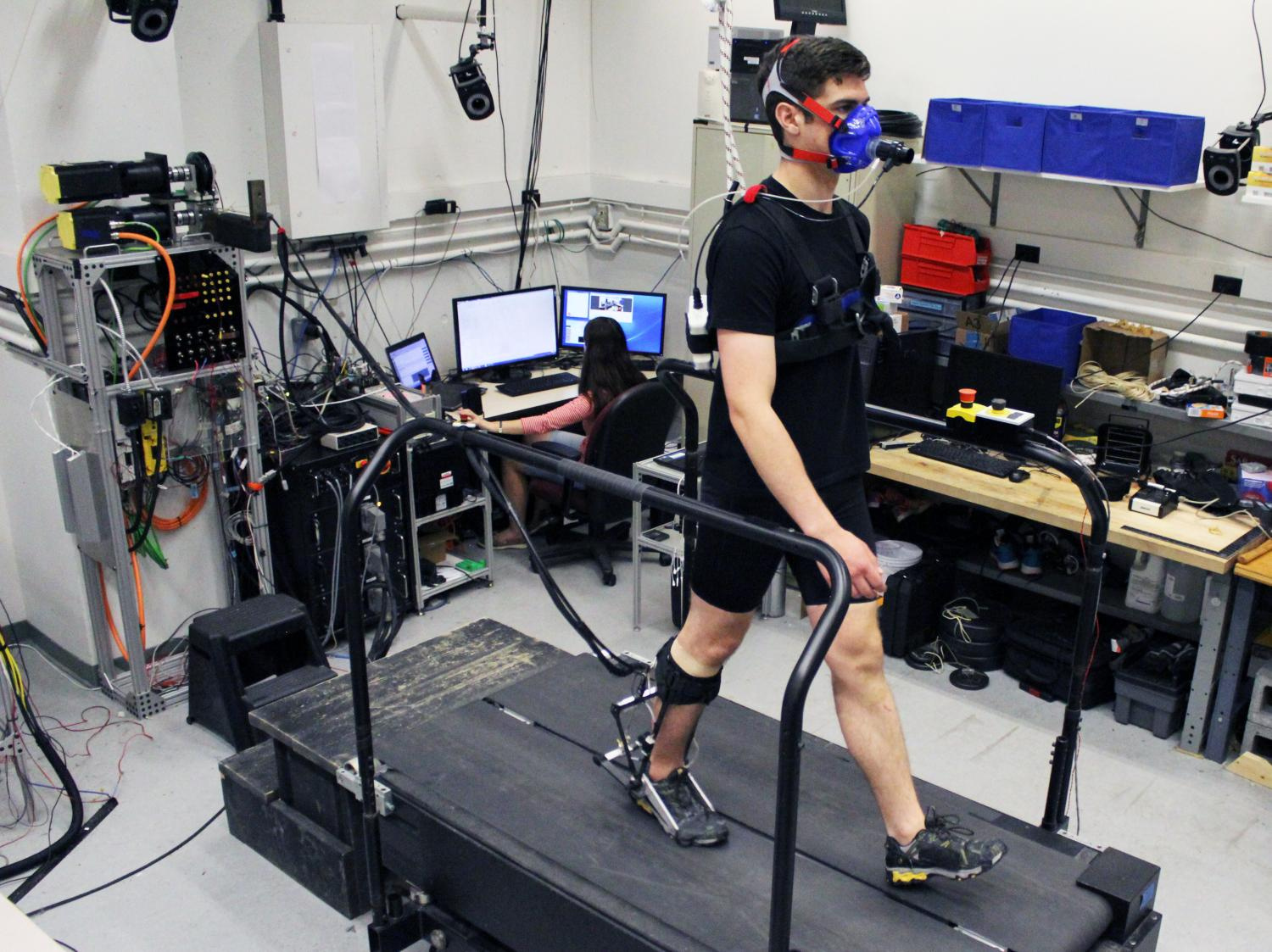
Robotic exoskeletons are seen as the future of industry, physical rehabilitation, and care for the elderly, but progress in this area is slow. However, things can change due to the
invention of researchers from the College of Engineering at Carnegie Mellon University. They developed a feedback system that harmonizes the movement of robotic limbs with human steps.
Within an hour, the system monitors the carrier's breathing - and iteratively changes the 32 operating modes of the exoskeleton, until it finds the most optimal one.
Identifying the optimal power pattern of the exoskeleton motors during walking is a difficult task. Each person has his own peculiarities of gait, and the characteristics of the steps depend on many conditions, including the surface on which the person walks. To solve this problem, engineers apply the brute force method, when the system tests different timings and powers to find the optimal mode, which gives the greatest metabolic benefit. But to measure the metabolic benefit, you need to repeatedly measure the carrier's breathing, which, in turn, reduces the number of settings that can be tested during brute force. That is, here it is difficult to organize the most optimal procedure.
A group of researchers from the College of Engineering at Carnegie Mellon University in its
scientific article describes an algorithm that optimizes the torque pattern of all exoskeleton motors during a 1-hour iterative process with real-time metabolic savings estimates. The exoskeleton literally adjusts to the person, tracking his breath.
During scientific tests of an iterative system with a man “in the middle of a cycle” on several volunteers, the system showed an average metabolic economy of 24.2 ± 7.4% compared to walking with the exoskeleton turned off. That is, a person spends about a quarter less energy when using an exoskeleton. Such a reduction is slightly better than the results obtained by other research groups, but these are very good numbers given that the exoskeleton was used for only one leg.
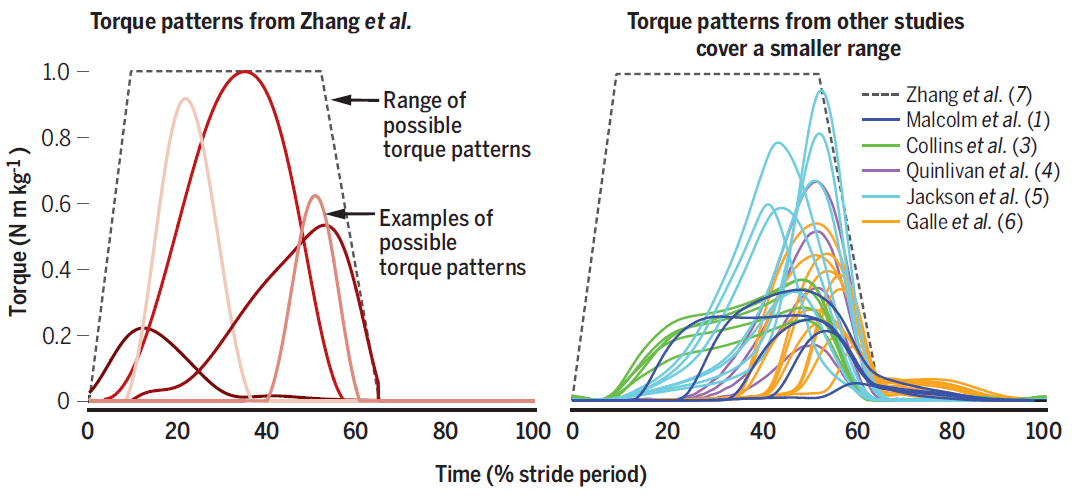
In addition, after optimizing the algorithm, the results were improved on the same exoskeleton. But the most important thing is that such training happens much faster than when using standard brute force and that has been demonstrated in other studies. This allows you to try out more diverse modes of operation with brute force (see graphics).
Such an interactive scheme with the constant tracking of human breathing (human-in-the-loop) allows you to adapt to the current state of a person, to his walking in current conditions.
Why this method of adaptation to the walking person was much more effective than other methods? Since 1970, scientists have shown that it is variable practice that promotes the acquisition of skill. Prior to that, it was believed that training should be carried out in constant, unchanging conditions. Roughly speaking, a person must repeat the same thing many times in order to learn it and acquire the skill. But no. As it turned out, the practice should be variable: the conditions should change - so the acquisition of skill goes much faster. Since then, variable practice has been used in medicine, sports, and vocational training. So, the algorithm of engineers at Carnegie Mellon University seems to use this principle, which has long been used to train people. The metabolic economy shown here is achieved through a combination of effective torque optimization and human adaptation to a wide variety of torque patterns that are sorted out in the process.
The authors of the scientific work suggest that in this way it is possible to accelerate the return of full-fledged motor skills to patients who have these skills impaired, for example, after strokes. The variability of the torque of the exoskeleton will provide such a variable learning environment in which the patient's skills will be restored much faster. This is about how cross-country running, which trains your legs much better than running on a level treadmill. Instead of walking with the same effort every day, a person will have to adjust, change speed and effort: this will be a truly effective training.

In addition, scientists plan to set themselves another task. If now the main goal was to save the metabolic balance (that is trite saving of forces) when walking, then in the future they can set a new goal for optimization: speed. In past years, scientific studies have shown that exoskeletons can really increase the average speed of a person when walking. It's time to check whether this can be done without compromising the metabolic balance.
In any case, the interactive exoskeleton, which monitors the walker's breathing and its metabolic balance, operates according to a given program - isn’t that what the future is for? Even a healthy person would not refuse such a device. For example, in normal mode, the exoskeleton just makes it easier for you to walk. But if you are late for a meeting - press the "Turbo" button, and the exoskeleton starts working in the speed priority mode.
The scientific article was
published in the journal
Science on June 23, 2017 (doi: 10.1126 / science.aan5367).