As promised in the
previous post , I got to the assembly site of the robot Kiki and looked at all the stages of work. Therefore, I will hold a small tour and tell you what I managed to learn myself. And at the same time I asked for a partial disassembly of the working robot in order to find out what was inside it.
SpoilerAt the end of the article you will find a video with a partial assembly of the robot.
I will start, perhaps, with the fact that the robot can both work autonomously and under the control of the operator. When I entered the development center, I was met by 7-8 robots and some of them periodically moved and answered questions. One of the robots was at all at the stage of debugging mechanisms and transmitted
preved to all users of Habr.

But we will start with a fully functioning model. All robots have serial numbers, 3 or 4 series have already been released and a more advanced model is being prepared, although current robots can do a lot. Let's start with the appearance and interaction with the outside world.

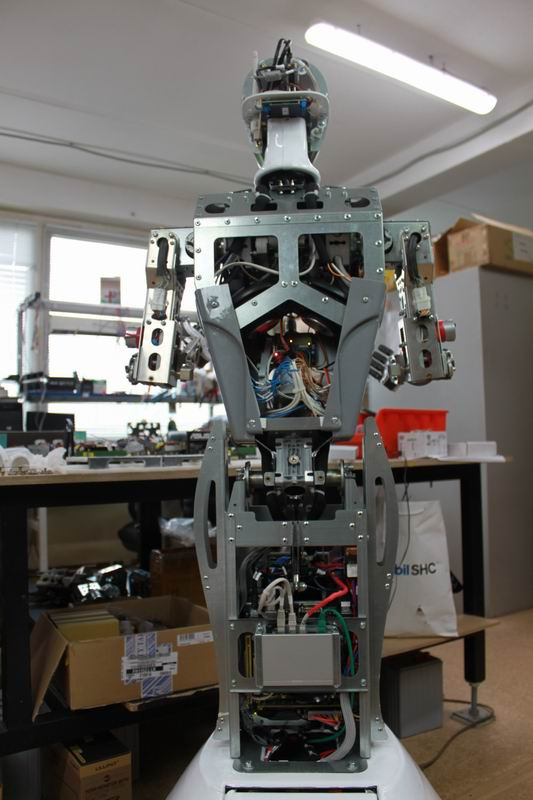
The robot and the operator receive an image from two cameras at once: one is at the place of the third eye, and the other is at the level of the knees. This position was not chosen by chance: through the top camera, the operator and the robot receives the main picture for interaction with any visitor. In addition, it is the image from this camera that is processed by the software module of face recognition and the determination of gender, age and mood. The bottom camera is needed exclusively for the movement and movement of the robot around the site or drive through the maze of stands at exhibitions - because it is rigidly fixed and always looks at the movement. There is also a microphone at chest level - this is how a speech recognition system and an operator hear a dialogue between a person and a robot.

In general, there are so many servos and degrees of freedom in the robot that you wonder. For example, the work of the hands provide 6 motors.
By the way, one of the popular hobbies at the exhibition is a handshake. The developers specifically limited the force with which the robot can squeeze the arm. In addition, Kiki is moving her fingers in a 4 + 1 combination. But, if you wish, you can rebuild this node and make it so that it moves each finger separately.


In general, engineers are very worthy of work on the mechanics. The head can rotate and bend. The body leans back and forth, and Kiki herself can literally turn around on the patch.
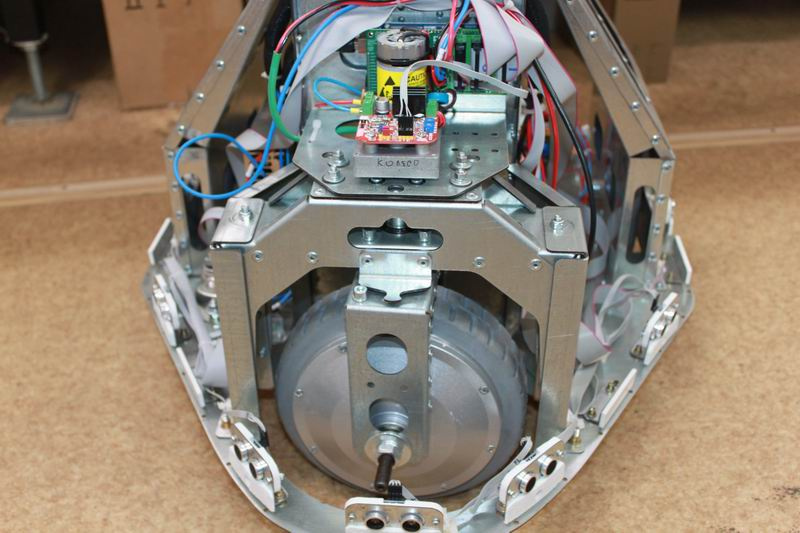
The photo clearly shows that the swivel wheel can rotate 180 degrees. In the same picture, ultrasonic sensors are visible around the base perimeter. So the robot sees an obstacle when moving and can stop or go around it - this will be as specified by the program.
All movements of the robot are called animation. Any action is implemented by writing a script in the menu of the robot, so it will not take long to teach something new. Simultaneously with the movements, the robot can move and speak.

The bearing frame is quite powerful, so it is not afraid of loads. Kiki herself turned out to be quite tall, something about 150-160 centimeters, therefore, to maintain stability, the engineers found an excellent solution: the center of gravity was shifted as low as possible due to the use of a heavy gel battery. This managed to achieve simultaneously high-capacity maintenance-free battery, low cost per unit of stored energy and good ballast for the stability of the robot. The time of fully autonomous work, without recharging, is about 8-10 hours, which is approximately equal to one working day. At the same time, Kiki can be connected to the 220V network at any time and it will start charging automatically, while maintaining performance, albeit with a lower mobility.
It is curious that inside the robot there is even a small local area network. If you look closely, you can see the switch, in which 4 patch cords are already inserted. Her work is provided by several computers on board. Unfortunately, the engineers did not allow me to photograph iron in more detail, citing the fact that they could not release me alive.
Even a housewife can manage it.As for management, it is a hybrid. You can start the robot completely offline and even set a displacement map - then Kiki will drive around the room, tell, show photos and videos on the screen, and also answer questions of all those interested. The second version of the work: offline + operator. The operator controls the movements and sometimes answers questions if one was not in the database. For example, the robot Kiki is set to meet bank visitors, identify them by person, and greet by name, letting a personal manager know that a client has arrived. But the client wanted to talk about the meaning of life, futures or cryptocurrencies. At this point, the operator enters the conversation, simply writing the response texts into the sound generator.
Add to this that each of the robots can be controlled both by the operator, within the range of Wi-Fi coverage, and remotely, via the Internet. The minimum speed required for normal operation is 10 Mbit / s, but for comfortable work it is better to have a channel of 30 Mbit / s. In addition, all robots work on a single large server, adding to the database. So robots in different branches of the bank will recognize the client, wherever he goes.
As for the operator's position, it is enough for him to have a laptop and a socket on hand.
Practical useSometimes Kiki is called a telepresence robot. But this is not all the possibilities of the robot. Telepresence robot is required to transmit the image and voice, as well as broadcast the voice of the operator to those who are close to the robot. Kiki is fundamentally different in that it can function independently: move according to a given route, react to obstacles, answer questions, show presentations or videos on the built-in screen. That is, the Kiki robot is designed for communication, advertising and interaction. This is noticeably different from all other robots.
How to make money on a robotIt turned out that such a robot can be a good earning tool. In many cities of Russia and neighboring countries, an opportunity has already appeared to rent a robot or to purchase it for its organization. And if before the banquets led
toastmaster
(with interesting contests), now rented robots do not stand idle at all. Therefore, more and more often the manufacturer is asked to expand the dealer network, and enterprising new owners in different cities write to the queue of people willing to rent a Kiki robot for a day or two.
ConclusionAs it turned out, during the exhibition, the robot is occasionally approached and asked to come for a visit: for a birthday, opening a store or holding a banquet, and sometimes even for a wedding. That is, Kiki is so attracted by the attention and does not repel his communication that many will be glad of the presence of such a robot at significant events in life. Maybe this is the gradual introduction of human-like robots into our lives? Wait and see.
You can rent a robot or buy one yourself at this
link .