Everyone is familiar with the Raspberry Pi system, which has rightfully received recognition, not only from the professional fraternity, but also from self-made singles. Now we’ll talk about another interesting project in the field of robotics.
Veterobot is a small all-terrain robot, a feature of which is in the openness of manufacturing technology and software.

A small, neat robot is literally stuffed with sensors and has a fairly powerful processor unit. The core of the latter is the on-board computer BeagleBoard-xM. This is an open system with an ARM processor manufactured by Texas Instruments. Its power is enough to control the periphery, perform complex algorithms and even compress video to H-264 format in real time (using DSP). The latter is very necessary in view of the fact that on board the device there are two video cameras that can be used to control movement.
In general, the filling of the robot initially has four ultrasonic rangefinders, a digital compass, GPS and video cameras. Control can be performed via WLAN or 3G (while in test mode), and there is also the ability to remotely control the robot via the Internet (for this purpose, onboard cameras will be needed).
All components of the device are open and accessible to everyone. Therefore, the capabilities of this robot are limited only by the user's imagination.
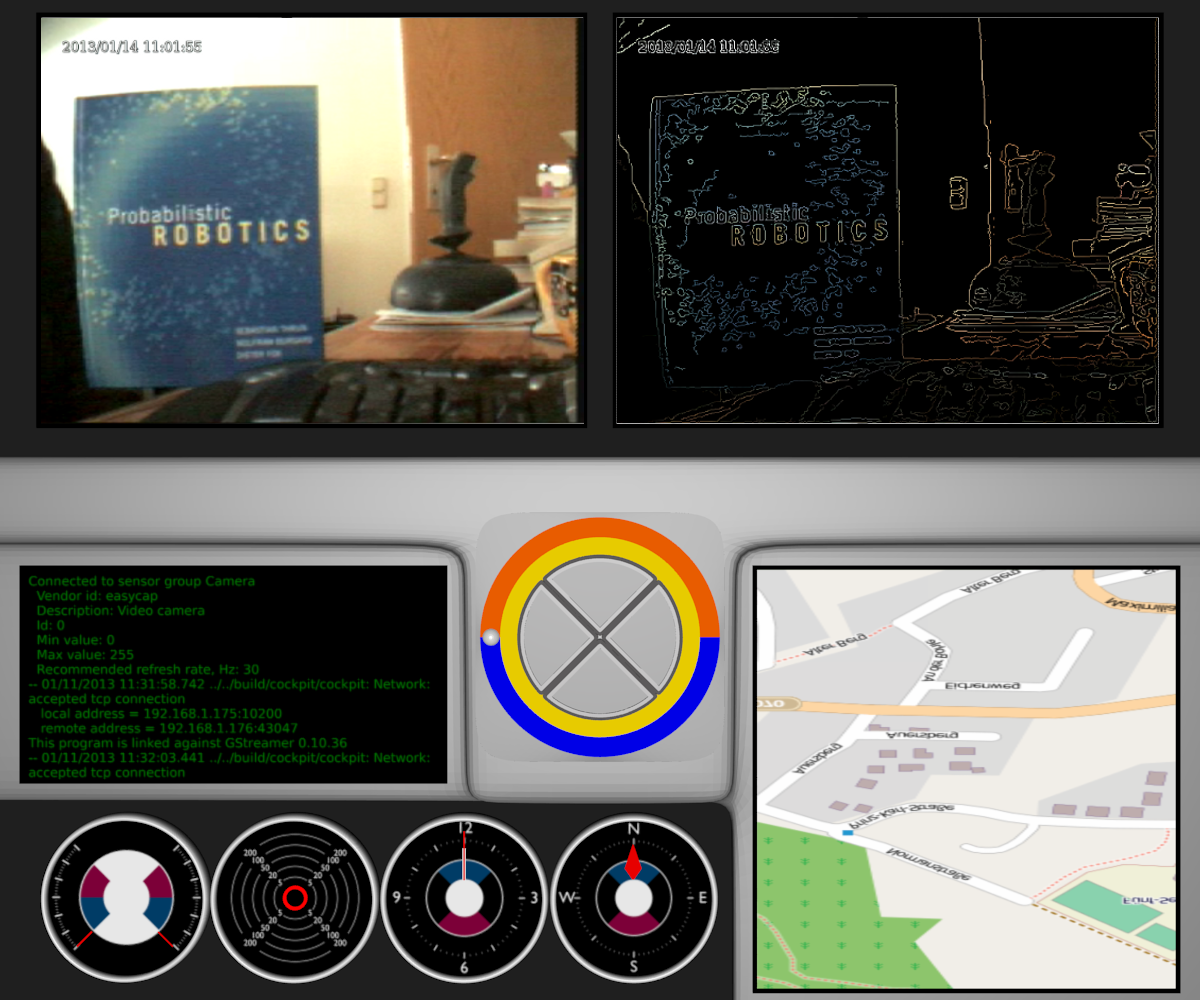
The software of the robot consists of a mixture of Angstrom Linux, Xenomai, ZeroC's Ice and other components. Also included is a special program that allows you to control the device and monitor sensor readings. Her working window in the screenshot below.
To create a Veterobot case, 3D printing technology is used, and the models themselves were made in the Blender program. The exception is the finished chassis Dagu Rover 5, which is equipped with two motors with angle sensors. But it is likely that other components can be attached to the device. At least, in the
3D presentation of the robot there is the possibility of changing the chassis, although I did not see any mention of this on the website. The application itself was also made using the free 3D engine Blend4Web (the presentation opens in a web browser and uses WebGL), and the sources are in the common project pool.

As a result, it turned out to be an interesting device that researchers or enthusiasts of robotics might like. Although the cost of the device is quite large, but its components, diagrams, 3D models, etc. are available for download in the
git-hub repository, and on the site itself there is an instruction for self-assembly.
PS By the developers of the device author of the article has nothing to do.