Flexible endoscopes are designed to climb into the most inaccessible places in the human body. Not for curiosity, but for the benefit of the patient. But no matter what the surgeon sees, using an endoscope, he cannot extract it or cut it off with the help of the same endoscope. Therefore, it is necessary to enter from the other side, both literally and figuratively, climbing into the human body through cuts on its body.
A group of scientists from Harvard decided to combine the endoscope with a robotic arm in order to be able to carry out operations directly "on the spot", so to speak. The manipulator has several modes of freedom, as well as the ability to delete certain objects or tissues. The manipulator hides in the endoscope until it goes to the goal. And as soon as the right place has been reached, the role of a roboruki comes.
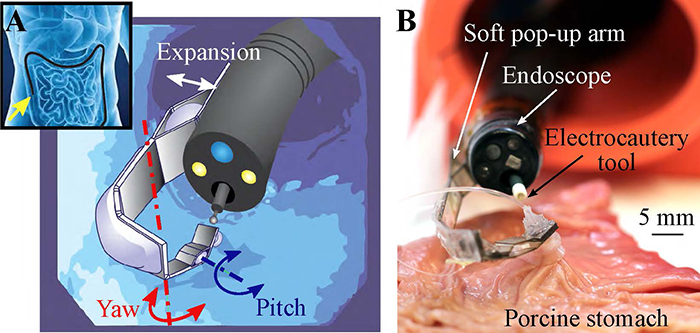 Illustration to the description of the concept of the manipulator and the photo of the robobore. On the right, the manipulator performs the operation directly in the gastrointestinal tract. These are just “field trials”, but still look impressive.
Illustration to the description of the concept of the manipulator and the photo of the robobore. On the right, the manipulator performs the operation directly in the gastrointestinal tract. These are just “field trials”, but still look impressive.Generally speaking, soft robots find their application in many branches of science, technology, medicine. Features of their design are such that the physician (after all, we are now talking about physicians) can use them with a high degree of efficiency inside the human body. True, the possibilities of robots are limited.
“At the millimeter level, soft devices do become soft, so that they cannot damage any kind of fabric, but they also cannot perform operations with this fabric. This limits the scope of application of soft microsystems for medical work. The question is whether we can create soft robots that can develop sufficient efforts without jeopardizing security, ”commented Tomazzo Rantzani, one of the project developers.
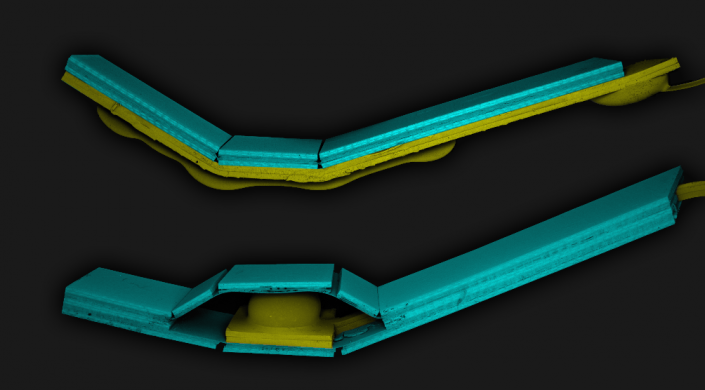
The team managed to create a working model of the manipulator, using a fairly strong and resilient "skeleton", surrounded by soft materials. Scientists say that when creating their roborukh they were guided by the principles of origami - paper figures. As mentioned above, the manipulator can get to the goal, there take a completely different form, pushing, in fact, the manipulator. After this, the surgeon can perform the operations he needs.
To bring the entire system in motion, scientists decided to use actuators that run on water. They are connected to the durable components of the skeleton using chemical bonds, so that additional adhesive fasteners (or other types of fasteners) are not needed. There is a manipulator and sucker in the list of tools, which works on the same principle as suckers in cephalopod mollusks. Scientists conducted a test operation in the artificial esophagus using pig tissue. The experiment was successful, the manipulator, without damaging the delicate fabric, performed the operation, everything was done in the best possible way.
The latest version of the manipulator was able to carry out operations with miniature objects, the size of which does not exceed several millimeters. In addition to other elements, roboruka is equipped with a feedback sensor, so that the surgeon, performing an operation or examination of the patient, can get an idea of the effort required to perform any procedure. And this can be one of the conditions for a successful operation.
In the future, experts plan to carry out the operation in real conditions, but, most likely, not on a person, but on an animal. "Our technology allows us to develop small-sized soft robots that are needed in medicine."
Soft robots are needed not only in medicine, but also in production. Relatively recently, scientists from the University of Science and Technology of China
showed a soft pneumatic manipulator that looks like a caterpillar. By the way, this system was also developed in conjunction with scientists from Harvard.
A robot of this type can capture and carry various objects, even heavy ones, follow the pointer and perform other tasks. In the future, the Chinese plan to train their robot not only to capture, but also to use tools, passing them a certain distance.