Science fiction is full of flying robots. There are flying humanoid robots, created in the image and likeness of man. This autonomous machines, and exoskeletons, which are controlled from the inside, like Iron Man. But in reality, we have not seen such robots yet. There are multicopters, but they cannot walk the earth like a human. Engineers from the Italian Institute of Technology decided to correct this shortcoming - they developed the
architecture of a flying iCub humanoid robot with four jet engines and a control system for it.
This is one of the first robots in the world, capable of flying and walking and manipulating objects, that is, capturing them with manipulators.
Human-like robots are traditionally regarded as terrestrial machines that move on the surface. But Italian scientists are confident that if you add jet engines to such a robot, the area of its use will expand significantly, since it will have more degrees of freedom. If we compare it with traditional unmanned aerial vehicles, they are also sometimes equipped with manipulators that can capture objects, but, again, the humanoid robot has an advantage over them, since it can walk on the ground. This increases the reliability and energy efficiency of the system.
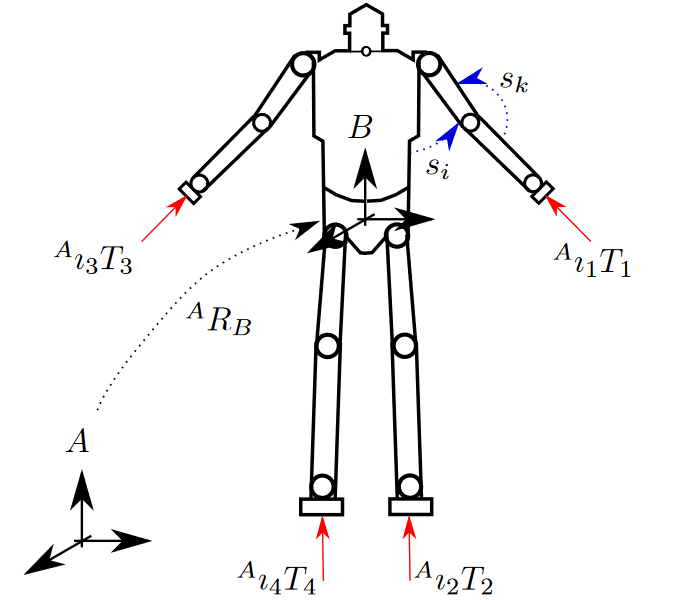
In the project of the Italian Institute of Technology, four jet engines are installed on the end effectors, that is, the "arms" and "legs" of the robot. Such an arrangement of engines seems a bit unnatural, but in fact a similar multimodal scheme has already been tested in other designs. Engineers say that it allows you to stabilize the calculated trajectory relative to the center of mass, taking into account small deviations in the orientation of the robot's support frame.
Italian development is far from practical implementation. The developers call it “the first step to creating flying humanoid robots” and it really is just the first step. What the engineers did was develop a basic framework for controlling the
simulation of the iCub robot during a fixed hovering in the air and smooth movement. Engine thrust is also calculated in the simulation program and is taken into account in the calculation of the control system. This work proves that the creation of such a robot and its management are
theoretically possible, although the developers did not take into account the aerodynamic effects and other factors that can manifest themselves during the practical operation of the robot. Everything has its time - and such calculations, and the first experiments with real flights will be later, but now the task was to make sure that it is theoretically possible to control the movement of such a mechanism in the air.
The video shows how the robot hangs in one place, and also calculates the desired trajectory for its center of mass.
One of the developers of iCub Daniele Pucci (Daniele Pucci)
said in an interview with
IEEE Spectrum that the idea of creating such a robot came to him four years ago when he went to work at the Italian Institute of Technology. Then he wondered how to apply his developments in the field of UAV control on a robot with various “body parts”, that is, not a completely rigid body.
Daniele Pucci believes that flying human-type robots have many advantages over conventional multi-copters, which are equipped with robotic manipulators. The latter often experience problems in windy weather, they cannot firmly stand on the ground, and therefore require more precise control when trying to capture a fixed object. Moreover, the humanoid robot has two manipulators, and not one, which makes the task even easier.
Another advantage is social. In the future, such robots can actually be used as exoskeletons for humans, in the image of Iron Man. The example of
Richard Browning, taping in the exoskeleton shows that such inventions will be in demand - in fact, who among us would not like to fly in an iron case with jet engines?
 Richard Browning hovered a meter above the ground.
Richard Browning hovered a meter above the ground.The scientific article was
published on February 16, 2017 on the site of the preprints arXiv.org (arXiv: 1702.06075) and is submitted for publication in the journal
IEEE Robotics and Automation Letters .