 Carcraft, software for building a virtual world
Carcraft, software for building a virtual worldIn the corner of the Alphabet campus, there is a team working on software that can be the key to creating robots. Not a single journalist has ever seen him before. They call it Carcraft, after the popular game World of Warcraft.
The creator of the software, a young engineer with a disheveled head of hair and the face of a boy, James Stout, is sitting next to me in an open office space where silence reigns and everyone uses headphones. The screen shows a section of a virtual circular road. There is nothing to catch your eye on - a simple image of several lines and a background with road textures. We see the Chrysler Pacifica robotic car, depicted in medium resolution, and a simple frame box depicting another vehicle.
A few months ago, the development team stumbled upon such a circular traffic in Texas. The speed and complexity of the road situation put the car in a difficult position, so the team decided to build a piece of the road of the same configuration on the test site. And I already look at the third stage of the learning process: the digitization of real driving. Here, the only real-world driver’s maneuver — say, a car that cuts you off in a circular motion — can be turned into thousands of simulated scenarios probing the limits of a car’s capabilities.
Such scenarios form the basis of a powerful tool for creating simulations. “Most of the work on new features is motivated by what we saw in the simulations,” Stout tells me. This tool has accelerated the development of robotic in Waymo, a dedicated company Alphabet (nee - Google) from its research unit X in December 2016.
If Waymo can create fully autonomous cars in the next few years, Carcraft should be remembered as a virtual world that played a significant role in changing the real world on which it was created.
It was originally designed to scroll through scenes encountered by cars when traveling on public roads. Now Carcraft and in general all simulations play an increased role in the development of robots.
At any given time, about 25,000 virtual robots browse fully modeled versions of Austin, Mountain View and Phoenix, as well as several test tracks. Waymo can play a simulated trip on a particularly difficult road hundreds of thousands of times a day. In total, in the virtual world, cars travel up to 8 million miles a day. In 2016, they traveled 2.5 billion virtual miles, against only 3 million miles traveled by real Google prototypes on real roads. And, importantly, virtual miles concentrate efforts on what Waymo employees call “interesting" roads on which cars can learn something new. These are not just boring miles on the highway on the way to work.
Simulations are part of the sophisticated process developed by Waymo. They have tightly tied up millions of miles, rolled up by their cars on the ADP, with a “structural verification” program, which they spend on a secret “castle” base in the Central Valley.
Until now, Waymo has not opened its system to the world. Miles driving along ordinary roads show them where their cars need extra practice. They build roads of the required configuration in the Castle, which allows them to play thousands of different scenarios right on the spot. And in any of the two test options, in the real world, machines collect enough data to completely recreate the situation in digital form at any time later. In this virtual space, you can get rid of the limitations of real life and create thousands of variants of any scenario, and then force the machine to go through them all. To improve the software driving the car, it is pumped back into the cars, which then drive along the roads even longer and even more difficult, and the cycle repeats.
To get to the Castle, from the Bay of San Francisco, you need to go to the east, then south on the 99th, and then along the highway Central Valley, going south to Fresno. Corn fields coexist with growing suburbs; the horizon disappears behind an agricultural haze. Here it is 30 degrees hotter than in San Francisco, and the surface is so flat that the slopes of this “earthly sea”, as
John McPhee called it, can only be measured with lasers. You move out not far from the small town of Atwater, where the Castle air-defense base [“Castle”] used to be, where 6,000 people served the B-52 program. Now it is located on the northern border of the small town of Merced, in which unemployment in 2010 reached 20%, and even now rarely below 10%. 40% of the population speak Spanish. We cross the railway and enter the territory of the old base of 650 hectares, on which all sorts of things are now located, from the wildlife control department to Etoterskoy State Prison.
My navigator in the phone led me not to a specific address, but to GPS coordinates. We’re driving along a high opaque green fence until Google Maps says it’s time to stop. Nothing indicates the presence of any gate. Everything looks like another section of the fence, but my host representative looks confident. Suddenly, a guard appears in the widening gap between the gate and the fence, and begins to check our documents.
 Fence
FenceThe fence makes way, and we drive into a hectic campus. Young men in shorts and hats run to and fro. There are residential cabins, dome garages, and in the parking lot at the main building - robomobili. There are several types of robo-mobility - Lexus models, which US residents could meet at DOP, Prius, retired and new Chrysler Pacifica wagons.
Robomobils are easy to distinguish. They are stuck with sensors. More than others issued laser scanners (lidars) on the roof. But the Pacifica also has small lidars the size of a beer can, rotating around side mirrors. Behind, they are equipped with radars that look like Shrek’s ears.
When you turn on the sensors of the machine, even if it does not move, the rotating lidar makes a strange sound. Something between a howl and a buzz, this sound is unpleasant because it seems new to me and my ears are not able to filter it along with the rest of the sounds of the cars with which I grew up.
At the main building is parked and even more interesting car. Throughout the body, red X-marks are attached to it. This is a fourth-level vehicle. Levels are the designations developed by the community of auto-engineers, describing the degree of autonomy of the mobile. Those cars on the roads, which we hear about, are on the first or second level - that is, they are able to go on a “smart” cruise control on the highway. But a red-X car is a completely different beast. Not only is it completely autonomous, the person inside it simply cannot lead it - so they don’t want to mix it with their other machines.
We drive up to the parking lot, and everywhere there are signs of the Manhattan project, the scientific outpost, the techno-start. In the main building, a mobile trailer the size of a classroom, I meet the driving force of this remarkable place. Her name is Steph Villegas.
She is dressed in a long fitted white blouse with a collar, terribly torn jeans and gray knitted sneakers - everything is terribly fashionable, as follows the former employee of the Azalea boutique, from where she transferred to Google. She grew up in the suburban district of East Bay on the other side of the hills from Berkeley and received a diploma in art from the University of California at Berkeley before she entered the robot design program in 2011.
“Did you drive a car?” I ask.
“I drive all the time,” she says.
She spends countless hours driving on Highways 101 and 280, going from San Francisco to Mountain View. Like all drivers, she developed a sense of how cars behave on the highway. And this knowledge turned out to be quite important for the program on the development of robots. They have developed an intuitive idea of what can be difficult for machines. “While checking the updated software and having a permanent position in the team, I began to think about what other complex tasks the system could have set,” she says.
So Villegas and several engineers began to invent and create rare scenarios of situations that would allow them to test the new behavior of the machines in a controlled environment. They began to occupy the parking lot opposite the
Coastal Amphitheater , setting up their own people at the entrances so that only Googleers could remain in the parking lot.
“It all started there,” she says. - There was me and a few drivers. We came up with a set of ideas that we wanted to check, loaded everything we needed into the pickup, and drove it around the parking lot, doing checks. ”
This is how the first structured tests appeared in the development program of the mobile. It turns out that the most difficult thing was to handle not complex scenarios, invented by people, like the fact that “what if there is a person on the road of a zombie”, but just drive confidently and safely in endless variants of ordinary road traffic.
Villegas began to collect props from everything she could get: mannequins, cones, artificial plants, toys, rollerboards, tricycles, dolls, balls, all sorts of things. All this went into a set of props (as a result, they began to keep it in a tent, and now in the Castle, in a special warehouse).
 Props Warehouse
Props WarehouseBut there were problems. It was necessary for the car to go faster, recognize traffic lights and signs. The plans constantly intervened concerts held in the Amphitheater. “There have been cases like: 'Well, Metallica is coming, we'll have to dump it,'” she says.
They needed a secret base. The castle has become just that. They signed a lease and started building their fake dream city. "We specifically made residential streets, highways, dead ends, parking lots, and all that, so that we would have a representative sample of characteristic places that could be traveled."
We go from the main office to her car. She gives me a map when we drive off on a tour. “It's like in Disneyland so you can navigate,” she says. The card is carefully designed. In one corner is a Vegas-style badge: "Welcome to the Fairy-Tale Castle in California." Different areas of the campus even adhere to the naming rules. In the one we drive, each road is named after the famous car (
DeLorean ,
Bullitt ) or after the car from the first Prius-based park that existed in the early days of the program (Barbaro).
We are driving past the pinkish buildings, the old barracks, one of which has been renovated - Waymo employees have a rest when they can't get back to the bay. In addition to these, there are no other buildings in the test area. This is really a city for robo-mobiles: everything that matters is either on the asphalt itself, or it borders on it.
 "City" in the Castle
"City" in the CastleFor a person, all this looks like the level of a computer game without characters. You feel rather oddly moving down the boulevards to seemingly residential streets with cement roads and suburban interchanges with no buildings. Some sections of the road occasionally seem familiar to me.
We are approaching a large two-lane circular movement. In the center there is a circle with a white fence. “This circular movement appeared here specifically after we tried a multi-lane circular movement in Austin, Texas, on ourselves,” Villegas says. “At first, we only had a single-lane circular motion, and we decided: 'Well, this stage is over.' And then we stumbled upon a multiband and were amazed: “Wow, a horse of a different color! Thank you, Texas. Therefore, we have created in ourselves and this beauty. "

We stop, and Villegas is considering one new addition: two automobile and one bicycle lane pass by a parallel parking bordering a lawn. “I really wanted to create a street with parallel parking here. This is often found in the suburbs. Walnut Creek. Mountain View. Palo Alto, she says. - People come out of the shops or from the parking lot. People go between cars, crossing the road with things in their hands. ” The strip was a fragment of her memories, embodied in asphalt and concrete, which would then turn into a more abstract form, to improve the ability of the robot to handle the familiar area.
She takes me back to the main office, and we climb into the robotic mobile van, one of the Chrysler Pacificas. Our driver is Brandon Kane. His assistant in the passenger seat will track the behavior of the car on a laptop using the XView program.
A group of assistants works with them, whom they call “foxes” - the nickname has grown from the word “artificial” [fox - fox, faux - artificial]. trans.]. They drive cars, create traffic, play pedestrians, ride bicycles, hold stop signs. These are actors whose audience is a car.
Our first check is simple travel and cropping, but at high speed. In this case, it is 70 km / h. We drive straight along a wide road, which they called Autobahn.
When the fox cuts us down, the Waymo car slows down and the team checks a key indicator in this case: braking. They are trying to create situations in which the car will need to brake sharply. How sharp? Somewhere between "damn, I don't have time for traffic lights" and "I sweat sharply and the phone flew off the seat."
I will say a strange thing: this is not my first trip to the robotic mobile. In the past, I had twice traveled on two different robotic vehicles: the first time was on a Lexus SUV that drove me through the streets of Mountain View, and the second time in a small Google Firefly machine that rolled on the roof of a Google building. These were unremarkable trips, which, in fact, everyone wants.
Now everything is different. Two fast moving cars, one of which should cut us off quite sharply.
It's time to start. Kane starts the car, and after the beep, the car says, "Auto-driving." Another car approaches us and cuts us off as a driver on a Porsche, seeking to drive first to the exit. We brake strongly, quickly and smoothly. I am impressed.
They check the data on the braking and understand that we slowed down dramatically. We'll have to repeat. And again, and again ... The second car cuts us from different angles, in different ways. They call it "get coverage."
 Rebuild at high speed. One of the machines is autonomous.
Rebuild at high speed. One of the machines is autonomous.We do three more checks - rebuilding at high speed, meeting with the car, going backwards out of the alley three blocks away from us, and a smooth stop at the sight of a basketball ball rolling onto the road. Each of the maneuvers is impressive in its own way, but the cropping test I remember most of all.
When we go to the restart, Kane moves to the seat. “Have you watched the
Pacific Rim ?” - he asks me. - Guillermo del Toro film, where people synchronize actions with giant robots to fight monsters. I'm trying to synchronize actions with a mobile. We have some common thoughts. ”
I ask him to explain what he means. “I'm trying to adjust to the weight difference because of the people in the car,” he says. - I spend a lot of time in the car and I can feel what she is doing - it sounds weird, yes - with my ass. I sort of understand what she wants to do. ”
Far from the haze and heat of the Castle in Mountain View is the comfortable Google headquarters. I came to them to meet with engineers working inside X, who might be known to you as Google X. This division of the company is engaged in long-term high-risk research projects. In 2015, when Google restructured and organized the Alphabet conglomerate, X dropped Google in the name (their website is called: X.company). A year after that, X / Alphabet decided to allocate a program to create robots in a separate company, as has happened with various other projects, and so Waymo appeared. Kind of like cousin google.
So, although the Waymo offices are still inside the carrier ship, these two clicks are slowly separating, and all Waymo employees are sitting separately.
The X / Waymo building is large and light. Prototypes of Project Wing drones are everywhere. I see a small Firefly typewriter built by the company. “There is something sweet about what you did yourself,” Villegas told me in the Castle. “But they didn’t have air conditioning, so I don’t miss them.”
Not far from the cafeteria in the corner of one of the wings of the building is a cluster of simulations Waymo. It seems that everyone on the screens work Carcraft and XView. Noticeably a large number of polygons on a dark background. It is these people who create the virtual worlds that Waymo cars drive.
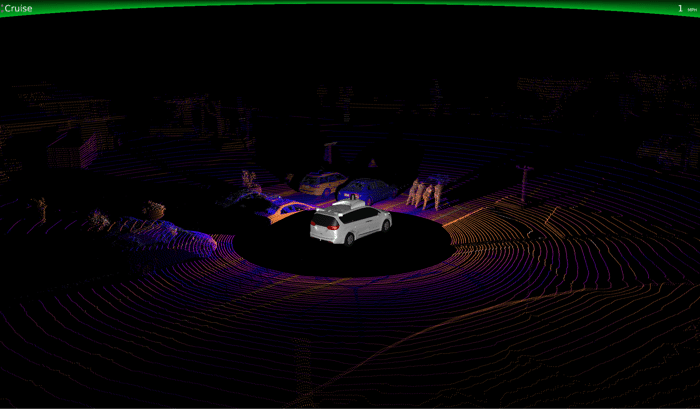 What did the Waymo laser scanner see when four people were pushing a car
What did the Waymo laser scanner see when four people were pushing a carI'm waiting for James Stout, the creator of Carcraft. He does not have the opportunity to publicly talk about his project, so his enthusiasm is breaking out. Carcraft is his brainchild.
« , , – . – , ». , 8 .
, , . . « , , », – . Carcraft , , .
Stout introduces me to Elena Kolarov, the head of the Script Services department. Before it stands two monitors. Right - Xview, showing what the car sees. The machine uses cameras, radar and lidar to identify objects in sight - it presents them in the form of small frame forms.Green lines go out of shape and show possible paths along which, according to the machine, objects can move. Below is a piece of the image, which shows that they shoot ordinary car cameras. Kolyarova can turn on the data obtained from the lidar - they are displayed in orange and purple dots.. . , , , . , «», . , , .
 XViewThey load another situation. It was in Phoenix. Kolyarova magnifies the image to show their model of the city. For the entire model, they marked, “where are all the lanes, which lanes go into which, where are the stop signs, where are the traffic lights, sidewalks, where are the centers of the lanes - all you need to know,” says Stout.
XViewThey load another situation. It was in Phoenix. Kolyarova magnifies the image to show their model of the city. For the entire model, they marked, “where are all the lanes, which lanes go into which, where are the stop signs, where are the traffic lights, sidewalks, where are the centers of the lanes - all you need to know,” says Stout.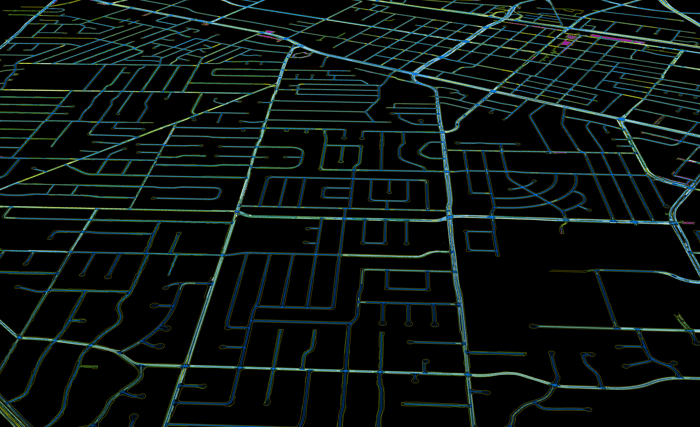 Now we are increasing one quadrilateral crossing somewhere near Phoenix. Kolyarova begins to set up artificial cars, pedestrians and cyclists on it.
Now we are increasing one quadrilateral crossing somewhere near Phoenix. Kolyarova begins to set up artificial cars, pedestrians and cyclists on it. Creating an artificial situation in CarcraftBy pressing the hot key objects begin to move. Cars behave like cars, drive in their lane or turn. Cyclists behave accordingly. Their logic was taken from data obtained from a million miles, knurled on the ADD. And all this is based on a super-detailed map of the world and physical models of different participants in the situation.
Creating an artificial situation in CarcraftBy pressing the hot key objects begin to move. Cars behave like cars, drive in their lane or turn. Cyclists behave accordingly. Their logic was taken from data obtained from a million miles, knurled on the ADD. And all this is based on a super-detailed map of the world and physical models of different participants in the situation. Not surprisingly, it is most difficult to simulate the behavior of other people. “I don’t worry about you driving, I’m worried about all the other people on the road.”
Not surprisingly, it is most difficult to simulate the behavior of other people. “I don’t worry about you driving, I’m worried about all the other people on the road.”« , . – , , , . . , , – - Waymo , . – . , , ».
There is one key difference: in the real world, you would need fresh, real-time data, process it on the fly and turn the script into an understandable machine, and then navigate it. But now, after several years of work in this project, they are confident that they are able to do this, because they “had a lot of checks to show that we are able to recognize a huge number of options for pedestrians,” says Stout.So in most situations, they simply skip object recognition. Instead of feeding the car raw data, which it should recognize as a pedestrian, they simply tell her: here is a pedestrian.. V, , Carcraft . : bird_squirrel.
Waymo Carcraft, – . « , », – .
, , . , , , , , . .
, 800 . – , .

, . : ? , , .
. , -. , , - . , . , . , , , , «shadow_vehicle_pose». , . Waymo .
, . , , , , . , , .
, . -, , ; — . -, , . -, .
“The cycle of repetitions is extremely important to us, and the work done on the simulation allows us to squeeze it cardinally,” Dolgov told me. “The cycle, on which we would have spent weeks at first, now passes in minutes.”What about oil stains on the roads? Bursting tires, weird birds, holes the size of a shell, and the general madness of drivers. That they pretend? Dolgov was sure of himself. He says they could do it, but “how much do you need to increase the accuracy of the simulator?”Carcraft , , . , , , , . , , – , .
. , , , . Waymo , - , .
Waymo 635 868 2015 2016. 124 , 5000 , 0,2 1000 . 424 331 , 272 , 890 , 0,8 1000 .
, , , , : . 20 000 .
Waymo . « , – , – , », – , Andreessen Horowitz, Improbable, . « Waymo , ».
Allstate Insurance, , Waymo. « , – . – , ».
. – Mcity, . , , , « 99% , - ».
, . Waymo. « , – . – : ».
, Waymo. , Google, , 20 000 , , . , « 2000 – ». : « 20 000 ». He fell silent.
“20,000,” he said, thinking it over. “This is impressive.”In fact, all of these 20,000 situations represent a small fraction of the total number of situations tested by Waymo. These are only the results of processing structural checks. They have even more situations taken from driving on real roads and just out of my head.“They do pretty well,” said Peng. “They are far ahead of everyone else in the development of the fourth level,” using slang for a completely autonomous car.. , - . , , , « », . Waymo, , $70 000, , Chevy, $40 000, .
“GM, Ford, Toyota : ' '. , – . – , ".
Waymo , – , Tesla. – . , Waymo « , ». , , , « ».
« , Ford GM , – . – Tesla , , , . ».
, . «, , . Waymo . , , . , ».
- , . , , Alphabet, . Google Photos, . , . , , .
, Waymo , , . «», «»? ?
, . , . , , , . , , , . , – , .
Carcraft , , , .
, , , , . – , , , , , , , .