
In addition to our native holiday on April 12 - Cosmonautics Day - there is the whole World Space Week, which lasts from 4 to 10 October. And recently, another article that in the future robots will deprive us of work, gave us the idea to ask, but what about the robotization of astronautics? Under the cut - a brief overview of the use of modern space robots.
As Wikipedia says:
Rabot is an automatic device created by the principles of recognition, retention and movement of objects in harmful and dangerous environments, designed to perform various types of operations for production, which operates according to a pre-programmed program and receives information about the position and condition of the surrounding space through sensors. The robot independently performs production and other auxiliary operations that partially or completely replace human labor. In this case, the robot can either have communication with the operator to receive commands from it, and act autonomously, in accordance with the program laid down.
The term "robot" can bring a myriad of devices. And those who you yourself in life would not have considered a robot. For example, ATMs are also formally “cash” robots: they are able, without human intervention, to receive and issue money, recognize the denomination of bills, sort them into their internal cassettes, and work with bank cards. Even industrial manipulators are considered robots, although their functionality is several times poorer than ATMs; but, on the other hand, they move, and therefore in our consciousness more closely correspond to the proud title of "robot."
Robots began to participate in space exploration before humans: the automatic interplanetary station (AMS) Luna-1 was launched in 1959 (Gagarin flew in 1961) and became the first vehicle to reach the second cosmic velocity and the first artificial satellite of the Sun. After Luna 1, to this day dozens of AMCs were launched into space, the most famous of which were the Voyager brothers. Perhaps some modern satellites can also be considered robots. All planet rovers - our and Chinese lunar rovers, American rovers - generally the purest robots.
Timeless classics
If we talk about the categories of devices we are accustomed to, then from the last, most impressive one, we can recall how the Rosetta spacecraft brought and landed the Fila descent vehicle on the Churyumov – Gerasimenko comet:

The European Space Agency managed to realize a truly breakthrough project: for the first time in history, an artificial apparatus was successfully placed on a comet. The Filas should have been fixed on the surface of the nucleus with the help of harpoons, because the gravity there is too weak, but they did not work, just like the rocket engine, which was supposed to press the device to the surface. However, "Fila" still sat on a comet and conducted a number of studies, including chemical analysis of the soil.
In 2013, the Chinese moonwalker Yuuchu landed on the moon. Actually, the most remarkable thing about him is that he: a) is Chinese; b) the first lunar rover in more than 40 years since the end of the work of the Soviet Lunokhod-2. With the planned three months of active work, “Yuuta” stopped moving after two. True, he did not break completely, but stood for more than two years, occasionally getting in touch. It is alleged that with the help of "Yuytu" managed to detect a new type of lunar soil.
As for the Russian planet rover, Lunokhod-2 (1973) was our last realized project. Also today, there are plans to create a descent vehicle "Luna-25", "Luna-27" and "Luna-28". The first one is intended for running in technologies, the second one will analyze soil samples on the spot, and the third one should bring moon ice to Earth.
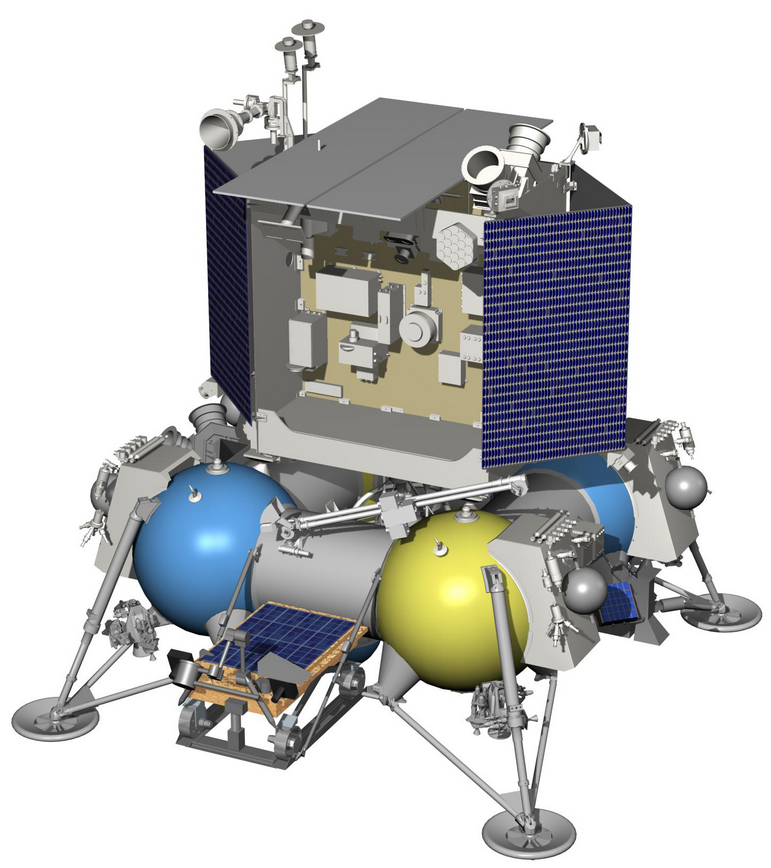
"Luna-25" ("Luna-Glob"):

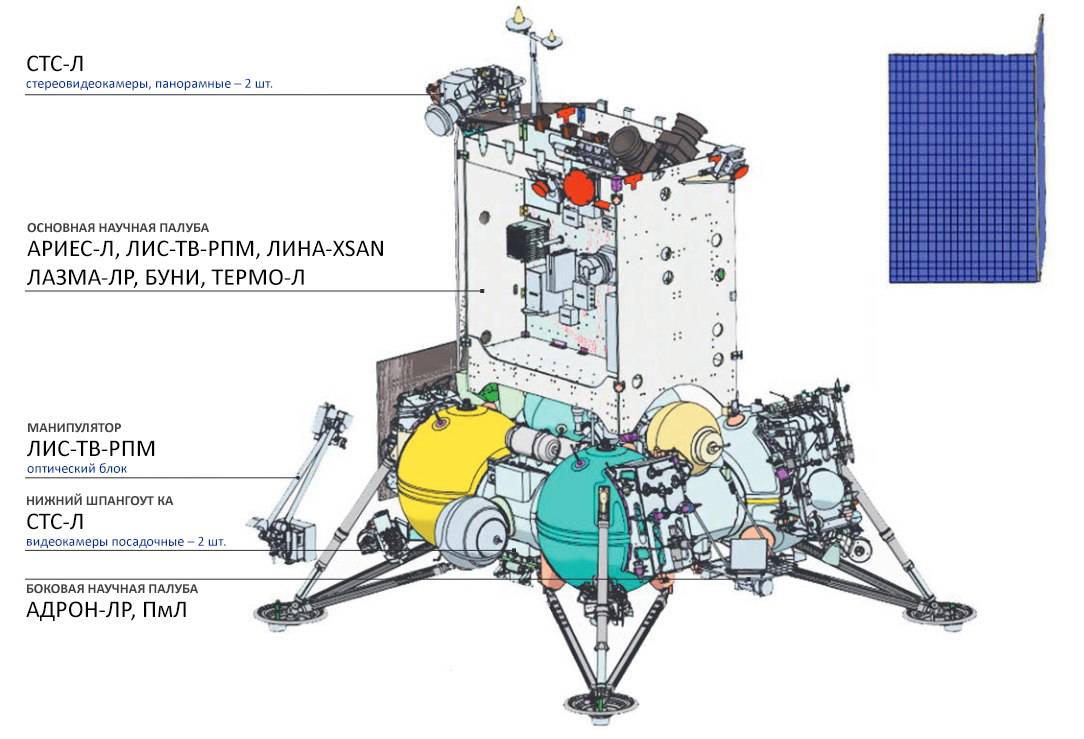
"Luna-27" ("Luna-Resource-PA"):
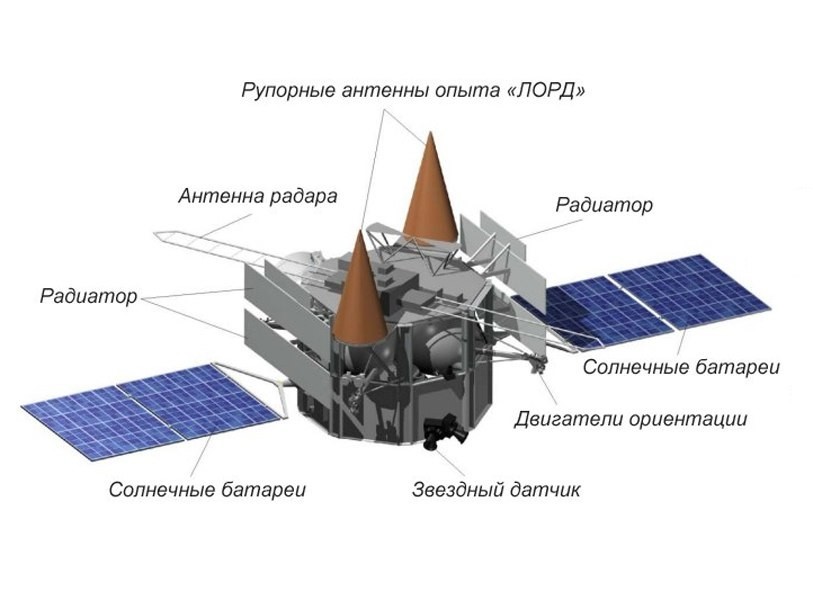
In the framework of the same project, the Moon will be investigated by the automatic station Luna-26 (Luna-Resource):
Given the constant postponements and the reduction of expenditures on the space program, it is not known whether these devices will fly at all. Modern research robots - AMC, planet rovers - are very expensive to develop, build and launch. Therefore, such projects are often the fruit of international cooperation. For example, the ExoMars program is implemented jointly by the European Space Agency and Roskosmos. The first part, ExoMars-2016, was only partially successful: the Trace Gas Orbiter satellite repeater successfully entered orbit around Mars, and the Schiaparelli descent module crashed. In 2020, it is planned to launch the second phase of the program - to send to Mars a surface platform developed by Roskosmos with the ExoMars rover. Hopefully, everything will turn out well, and the Russian-made planetary rover will finally begin to study the Martian desert.

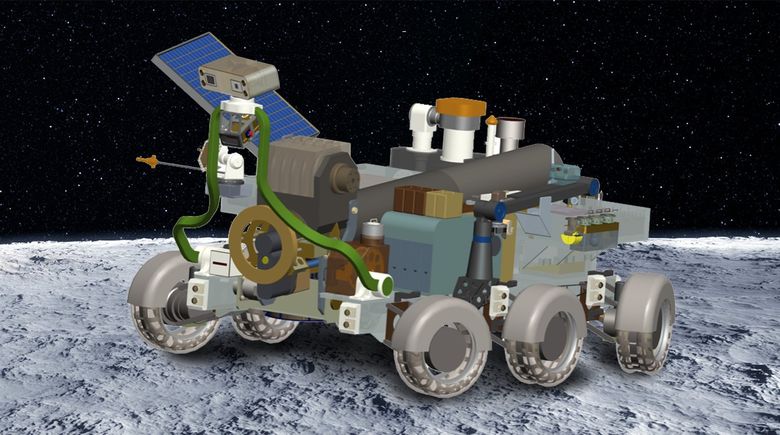
However, there is hope that Roskosmos is implementing another interesting project of a research rover, which still bears the working title “Robot Geologist”. Two years ago, it was reported that in terms of its functionality it will be comparable to Curiosity, which flew to Mars back in 2012, only the “Robot-geologist” is going to be sent to the Moon. The six-wheeled lunar rover will be about 4 m long and weigh about 1400 kg. So far this is only a project, but who knows ...
And here are the pens!
On the ISS, two robot manipulators have been operating in space for many years: the Canadian arm Canadarm2 with the “expansion” SPDM (“Dextre”), which can be controlled both from the station and from the Earth:

... and the Japanese JEMRMS 10 m long:

Robots avatars
One of the most interesting areas of development of space robotics is robots avatars. These are devices that astronauts can remotely control, performing work in open space, but at the same time being in the warmth and comfort of a space station. The fact is that it is very expensive to release a person into outer space: each astronaut is sewn with individual space suits, which themselves stand as several luxurious cars, and yet they still need to be delivered to the station. If you count all expenses, cosmonauts each hour of work in open space costs, according to various data, $ 2-4 million. At the same time, not always there is a need for special work ingenuity, there is enough routine operations in space repair / installation / unloading / loading. It would be ideal if autonomous robots were engaged in this, and astronauts would spend their time on more important tasks or simply rest more. But alas, the technology of artificial intelligence is still in its infancy, so you can save money and time at the exit of people in open space only with the help of robot avatars.
Their development is carried out in NASA, and in Roscosmos, perhaps in other countries. For example, within the framework of the American Robonaut program, several models of anthropomorphic robot avatars were created. Robonaut 2 in 2011 sent to the ISS.

This year the competition initiated by NASA to develop the best control algorithms for the future Robonaut 5 robot (“Valkyre”), which is planned to be used in various agency missions, including on an expedition to Mars, ended.

The 185 cm tall robot weighs 135 kg, consumes 1.8 kWh and is controlled by two computers based on the Intel Core i7. The robot receives basic information about the surrounding space using a sensor system, including passive stereo vision, laser scanning and generation of an infrared structured illumination point cloud (IR structured light point cloud generation). The power supply of the robot can be both autonomous and by cable.
The Russian anthropomorphic robot avatar SAR-400 - our first space robot after a 20-year hiatus - a couple of years ago was noted in the news, having a ride on a quad bike in front of the president. After ground tests on a full-size model of the MKS module, the robot was planned to be sent to a real station, but they abandoned these plans. Later, an improved SAR-401 model was introduced, which is also biased on the ISS, but not before 2021.
Also, our space corporation plans to settle on the ISS "Andronavt" - a companion robot for psychological and informational assistance to astronauts. This is not the first experiment of this kind: back in 2013, a Japanese robot Kirobo was brought to the station, which became, ghm, a companion for the Japanese astronaut. But if Kirobo was only 34 cm tall and weighed 980 grams, then the Andronaut was the size of a hefty man. The current prototype is even too large for the ISS, and if we still send a similar-purpose robot to the station, it will most likely be a more compact model.

In addition, "Andronavt" is a dual-purpose robot: it can work in the avatar mode, being controlled by a man from both the station and the Earth. It is intended to use it for work inside the station module in the event of its depressurization, as well as for routine inspection in semi-autonomous mode.
Yourself master
A curious project is being developed under the auspices of NASA - a space robot ("Dragonfly") for the assembly and repair of satellites. In fact, it is a 3.5 m long arm-manipulator, with the help of which satellites can independently mount antennas and other fragile equipment in space. Also, Dragonfly will be used to assemble large satellites in space, which are too expensive or impossible to put into full orbit.
The same SSL office that creates Dragonfly, is also working on RSGS and Restore-L satellites repair robot projects. This is a very urgent problem, since the lifetime of the satellites is not too long, usually in a few years. Then they run out of fuel for shunting engines, or they die, often replenishing the legion of space junk that has already enveloped the planet. And with the help of repair robots, one can save on launching new satellites instead of broken ones and slow down the littering of near-Earth space.
Last year, the head of the laboratory of space robotics at TsNIIMash reported that repair robots for satellites are also being developed in our country. But we could not find any information about these developments.
Star bee
NASA plans to soon send a special Astrobee auxiliary robot to the ISS. This is a cube with a side of 30 cm, which will fly through the station and assist astronauts in conducting experiments in microgravity conditions, as well as serve as additional eyes and ears for Houston. A sort of fluttering snitch.
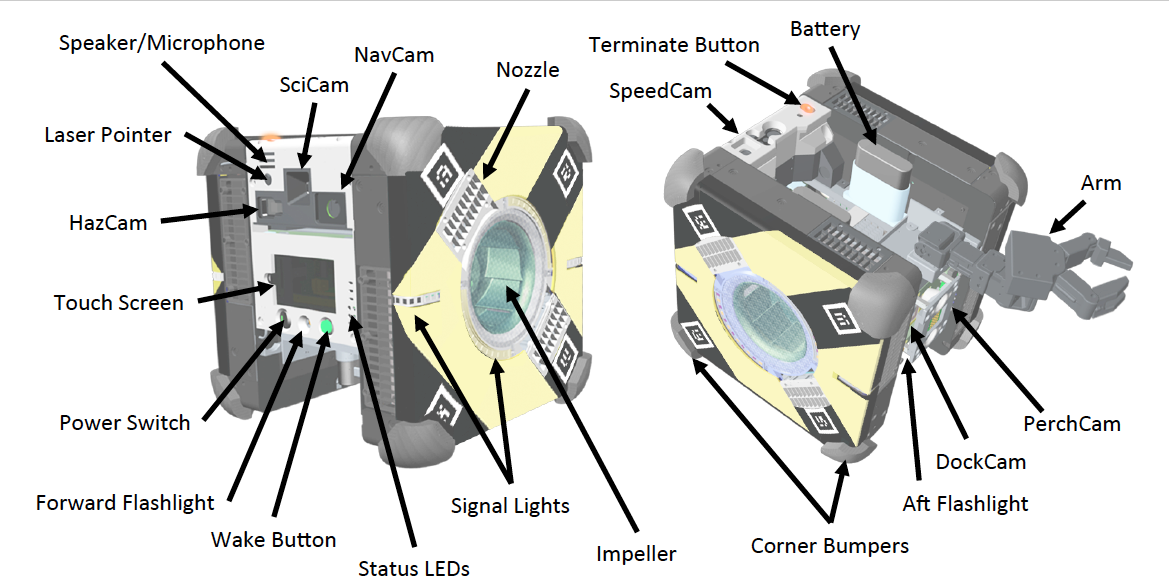
The Star Bee even has a small manipulator with which it can moor somewhere or hold something during experiments. The robot removes routine inventory tasks from astronauts; using an RFID scanner, it will be able to catalog and update data on the location of any units and objects at the station. Also this high-tech alter ego "Lizuna" will be able to monitor the air quality and noise level on the ISS.
Asteroid thief
NASA, as the richest aerospace agency in the world, can afford very complex and unusual projects. By the mid-2020s, they were going to realize the original Asteroid Redirect Mission for Asteroid Exploration. A special robot was supposed to fly up to the asteroid, find a suitable boulder on its surface, grab it with manipulators and bring it to orbit around the moon, where the pebbles would be taken by cosmonauts into their friendly arms, took samples and sent to Earth to analyze the chemical composition in order to find out the whole truth about that asteroid from which the boulder was snagged The prototype of the robot has already passed the test, its launch was planned for the 2021st. But space programs are cut not only with us, and the project has become a victim of budget cuts. It is possible that the prototype of the stone carrier robot will be used in other NASA missions.
Although in reality, as already mentioned, robots in space are a dime a dozen, but the devices that in the minds of the general reader correspond to the title of “robot” —an anthropomorphic, autonomous-acting apparatus — there is almost no such thing today. Another thing is that it is anthropomorphic robots in space that are needed last of all - rationality, functionality and specialization reign there. Anthropomorphism, for the most part, is only appropriate for those devices that often or permanently come into contact with a person. In the meantime, the vast majority of space robots will be like anything but “robots”. But when we create an artificial intelligence technology that is compact enough and energy efficient so that it can be embedded in space devices with their most severe mass-dimensional restrictions, then the second era of robots will come.
In the meantime, we wish you success, good luck and generous funding for the Andronavt developers!