The difficulties of construction, how much is a robot, the rules, which seems to be there, but in fact there is not, and what happens on the show.
Many of our decisions may seem controversial, but if you look at them from the point of view of the original terms, everything looks somewhat more logical.
Attention! Under the cut a lot of photos.
We started the discussion on the robot on August 25, and according to the initial requirements of the organizers, the finished robot should have been submitted by September 4. We perfectly understood that this period will be shifted, but how much is a big question, and this further complicated our lives. Looking ahead, I will say that the robot left us in early October.
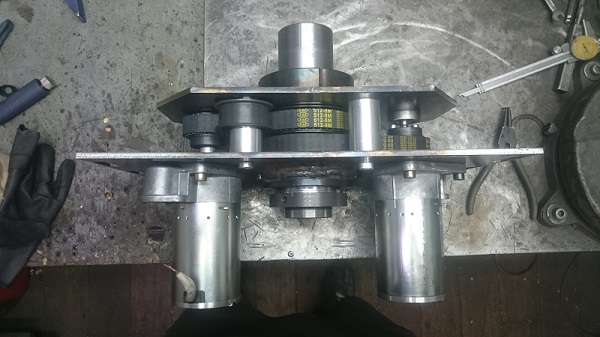 (gear unit without walls)
(gear unit without walls)Type of robot and restrictions
When choosing a concept, we just looked at what robots exist and how they fight:
- Flipper (robot, usually with pneumatic tipper). One of the most advantageous options, as he can return to the correct position with the help of his weapon. According to the rules, a robot that does not move for a long time loses. We have rejected this option due to possible difficulties with pneumatics, we didn’t have pneumatics specialists in the team, and we don’t have enough time to rework.
- Robot with vertical or horizontal saw. In almost all videos, these robots looked good before the fight, but the weapon refused at the first strike and did not inflict damage to the opponents as a whole, except for scratches.
- The weapon in the form of an ax, the staples on the support look very unreliable and it is not easy to pierce the 5mm metal allowed by the rules.
- The robot under the now fashionable name “spinner” (massive beam rotating above the robot) seemed to us the simplest to manufacture and containing the least amount of unchecked moments in the design.
- Robots with a flywheel in front are also in fashion now, but they are technologically similar to our choice, and they do not have circular protection with weapons.
According to the regulations, there are two main limitations:
- weight - 110 kg;
- dimensions not more than 1200x1200.
On this show, with the rules, miracles were happening - for two weeks we agreed on one wall of the 6 mm gearbox of the weapon, not 5, since it had already been cut out (although everything related to the weapon does not have these limitations). As a result, robots with a wall of 10-15 mm and a height of 100 mm with a minimum height of 300 mm were allowed on the spot. In Russia now, as I understand it, two large organizations that conduct robot fights. If you want to participate in both projects, it is worth remembering that the second has maximum dimensions of 1500x1000.
 (process of welding blades)
(process of welding blades)Control
Management is not really a lot of alternatives. Make your own or buy ready-made from radio-controlled models. But in this case, neither in terms of cost, nor in time, I see any sense in making my own, it will be more expensive and longer, even taking into account the fact that the electronics of their development are still on board. Yes, and a normal, ergonomic remote control pleasure dubious. According to the regulations, the equipment must support the Fail-safe function, in case of loss of the signal from the transmitter, the receiver translates all channels to a predetermined value (the weapon is off, movement is stopped). We set up two sets of controls, and in case of damage to the main one, the system from the outside command was switched to the backup one.
Also, the old control systems do not have a working algorithm at different frequencies and operate on a fixed channel. In practice, this led to the fact that at the demonstration performances one team could not get off the ground - radio microphones and video broadcasting occupied the channel completely.
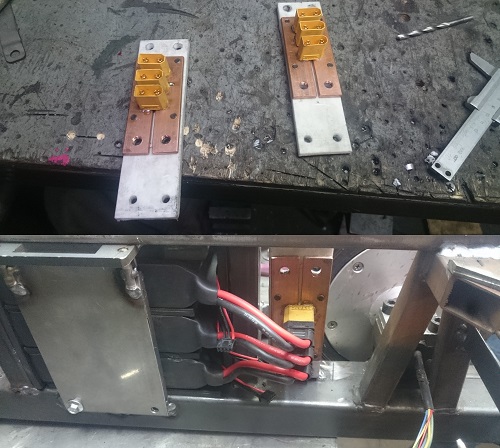 (gun power tires, fluoroplastic gaskets)
(gun power tires, fluoroplastic gaskets)Movement
From the available choice - self-made engines with regulators of the course, the battery for three minutes of battle with a reserve. So does most of the teams in the world, after the motor, the gearbox and the last link is a chain to the wheel. Everything is good for us, except for the gearbox. In the presence of failed to find, but to make it a huge reservoir of work.
From the available here and now there were motor-wheels from hoverboards. 4 wheels of 350 Chinese watts each should suffice with a margin and a guarantee, so in general it came out, but more on that later. Of the difficulties, who will follow this path - the voltage of the motor-wheels of the 36V hoverboard, model regulators for such voltage are usually helicopter and do not have a backing, we almost accidentally bought. To control the motors, you could make your regulator immediately with model control (from 1ms to 2ms at the receiver output depending on the position of the knobs), but it would take more than two weeks for the board, parts, debugging, and at the time of purchase it led the regulators judging by the reviews, there were no complaints about them - just in the control boards, they made a PWM converter → 0-5V.
In our opinion, taking into account the experience gained, the ideal solution for a 110 kg robot is two wheels and from 800W of total power.
 (blocking bolt, once again saved our hands and feet)
(blocking bolt, once again saved our hands and feet)Weapons
In terms of power and redundancy, we initially decided that the rotor with hammers would turn two engines. For a week, apart from auto-starters (1.5kW, 12V), nothing came to hand. It was a decision akin to attacking a red-hot rake. The technical coordinator of the project, with great doubt, said that many had tried before us, but it did not work out. Counting everything again, they decided that everything would be fine. So it almost was ... until the very last days before shipping. Starter speed of about 3000 per minute without load, and since it is necessary to let the enemy robots enter the hammers, and not just scratch them, they decided to reduce the speed to ~ 1500 using a belt reducer, which at a speed of 10 km / h provided 70 mm in the zone of hammers. The Japanese prototype had 7 small engines spinning a large gear. The belt gearbox was chosen for temporary reasons, pulleys were available, and belts to order came in two or three days; in addition, it was supposed to protect the engines from destruction when the rotor abruptly stopped on an obstacle.
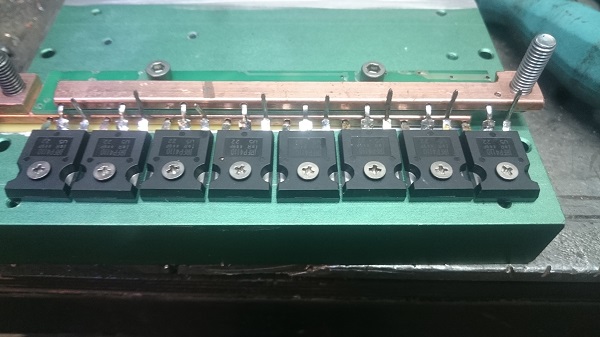
 (pictured textolite knot made on CNC and grinding of brushes)
(pictured textolite knot made on CNC and grinding of brushes)Electronics
Most of the robots have components from radio models installed, but we are faced with the fact that the model relay purchased for a short time (100-200ms) is turned on when power is applied regardless of the position of the control elements of the transmitter. Considering that our circuit started rotating 30kg of the rotor, the use of this relay was dangerous, but since there was a controller on board on each board, they brought another channel to it from the receiver, and turned on the relay through the filter.
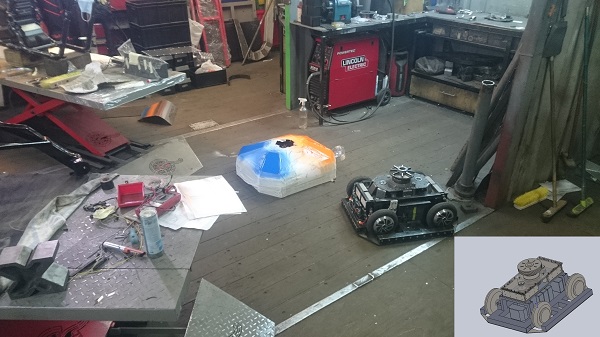 (painting process, on the right you can see some differences in the layout of the first version from the final one)
(painting process, on the right you can see some differences in the layout of the first version from the final one)Robot name, team and logo
It was the easiest task of all. Half of our team makes custom motorcycles to order - they took their logo and name. The second half is developing electronics for modern electric trains, including traction converters with a capacity of more than MW.
 (damper to protect gearbox and motors)
(damper to protect gearbox and motors)The difficulties that we have
The whole robot in fact is two systems - thrust and weapons. We had problems with both.
By the way, everything was fine, until the moment the hammers were installed on the rotor. After that, the robot categorically refused to turn around and the controllers began to burn out.
The cause of the controller burnout could not be quickly established, since not all of them were burning. But once again I write that there was no time, and we considered that the power transistors burn with overvoltage, since the inertia of the robot is large, and the controller algorithm could be flawed. We assembled a circuit with a chopper, in order to drain all the overvoltages onto a resistor, brought in an oscilloscope, plugged in a chopper, and saw that the voltage rises to a maximum of 5V. There was no excess current, more ideas too. The burnt transistors were replaced with normal ones, and a miracle happened - there were no more problems with them even on the show. Just a defective batch of transistors (here I recall the case of how we were put on the production of chips empty inside, but with a normal marking).
 (bus with transistors for the current controller, which in the end was not used by us, since it worked on the verge of overheating)
(bus with transistors for the current controller, which in the end was not used by us, since it worked on the verge of overheating)The second problem is the traction battery. From the point of view of economy and availability, they took from giroskuter. They are all good, except for the maximum current. On average, this battery gives no more than 50A and turns off on overload. We, at the peak, needed more, since one battery for two controllers (front and rear wheels are powered and controlled separately for redundancy). I had to disassemble the battery and disable this protection physically, but it is worth understanding that this is a controversial method and is only permissible during very short and rare overloads.
On four wheels, in order to deploy 100 kg in place, according to my feelings, you need at least honest 1.2 kW. At two, this requirement drops sharply to 500W. Maneuvering even for a “circular defense” robot turned out to be very important. We underestimated this factor and are now translating the robot into a two-wheeled version.
The most "pleasant" was waiting for us after we showed the organizers of the finished robot, but without hammers on the blades. That is, technically, the robot was admitted, but in fact the starters were burning 7-12 seconds after launch, and the hammers came out of luck at the last moment.
Several measures were taken: grinding the brush units, making a meltable plastic brush holder from a PCB. These measures significantly reduced losses, but the power output was too high.
 (end of installation)
(end of installation)Three days remained before the shipment, a reliable current regulator of 200A, during this period, could not be made from parts that were in St. Petersburg, but we did not find delivery in a day. We had to take a desperate step, slow down more than twice, say goodbye to reserving weapons and turn on the motors sequentially. These measures also helped on the spot; there were no problems with the motors. At the moment, without haste, we are looking for other engines. Starters work stably, but their use can not be justified by anything other than timing (total for tests and stock, we bought 7 starters).
Cost of
The final cost of the robot is about 230 tr. This is with all parts, dual control, burnt starters and all the rest. If you do in a more relaxed rhythm, I think you can keep within 190 thousand. The file is working, so it is not all in sections, but it is not fitted.

Show
As a result, we took part in 3 battles. This is an indicative destruction of the monitor, a qualifying battle, and an indicative battle of the assistant to German Gref and someone from the government. Since I do not have the rights to broadcast the show, I’ll insert one video with the destruction of the TV, shot by us:
In 3 battles, the rotor was torn off, and the enemy had the axle twisted out along with the bearing. We changed bolts to more powerful ones, but in fact this was the most difficult case, since the enemy’s mattang was spinning in the direction opposite to our rotor.
From unforgettable this is a repair at night of the robot in the boxes of the formula one:

Judging a lot of questions remained and not only our team. In our battle, a robot was allowed to participate, initially with a non-working weapon, which passed on. The organizers offered us rather strange “controversial battles” for those who left it is doubtful, but we refused because we either went through or not. Fish second freshness does not happen.
With the tolerance of robots, too, it is worth thinking hard. When more than a third of robots do not pass under the regulations, but are allowed into the main grid, this is strange and definitely does not lead to an increase in confidence.
There are general phrases in the regulations that “the robot should not be non-destructible”. This phrase should be removed or clarified. Take the winner - this is a perfectly assembled flipper with a tubular frame, which is destructible? Since its lifting platform is considered a weapon, at its beginning a thickening of more than 5 mm. Flippers won last year. For interest in the show, it is clearly worth thinking about equalizing the chances, so as not to get some flippers in the next shows - the battle between two flippers is a rather dull sight. Proceeding from “criticizing-offer”, I see a solution in removing the sides, since the flipper simply throws all the opponents there and the fight is decided in the first seconds. The fact that the winner this year overturned robots back was his goodwill and not the fact that others would do the same, and this greatly affects the impression from the show. Screws should also be placed close to the glass, otherwise the only type of robots that can be thrown there is a flipper.
The show for the audience was great. Sound, light, script - really cool and exciting. Glowing dancers - the idea is not new, but it was seen for the first time alive and it also caught on (we managed to fix one of these costumes a few seconds before the performance on the final show, despite the fact that we didn’t participate in it - at least in some way). . I am grateful to those people who have carried out such a huge amount of work. Planck was raised extremely high, we will follow the development of events.
P.S. The article turned out a little about the robot and a little about the show, but in my opinion, the material didn’t drag the two separate articles, and diluting them with how we visited Skypark, Rosa Khutor and with whom we met it would be a dubious decision for a technical resource.