 One of the variants of artificial muscles can be seen in the upper part of the photo (two tubes). They raise a car tire weighing 22 kg. Photo: Massachusetts Institute of Technology
One of the variants of artificial muscles can be seen in the upper part of the photo (two tubes). They raise a car tire weighing 22 kg. Photo: Massachusetts Institute of TechnologyArtificial "muscles" claim to be safe and powerful drives for a variety of different devices: from conventional machines to implantable electronics and robotics. But often the construction and production of such “muscles” are too complicated and expensive, which limits their use. A group of scientists from the Massachusetts Institute of Technology and Harvard University have developed an
extremely simple design of a biocompatible drive worth
less than a dollar , while being powerful enough for such a primitive device.
Drives can be made from different materials and different sizes, using a published design in origami style. They work in the air, under water, in a vacuum.
The basic concept of a new device includes only a compressible frame, an outer shell (“skin”) and a filler, which can be any fluid material, for example, air or water.
Experiments have shown that such drives can compress up to 10% of their maximum length, they can withstand loads of up to 600 kPa, and the maximum power density exceeds 2 kilowatts per kilogram. This roughly corresponds to or even exceeds the specific power of human muscles.
 Design, manufacturing process and resulting multi-scale drives
Design, manufacturing process and resulting multi-scale drivesThe work of artificial muscles, as well as the cheap process of their production is shown in the illustration above.
Legend(A) Miniature linear actuators using zigzag origami structures made of polyetheretherketone (PEEK) as carcasses and PVC film as “skin”. Thanks to the use of biocompatible materials, such drives are suitable for use in medical implants and wearable electronics. (B) Large powerful drive assembled on a zigzag frame of nylon printing plates. The “skin” is made of thermoplastic polyurethane coated nylon. A car wheel weighing 22 kg rises to a height of 20 cm in 30 seconds (
video ). (C) The principle of operation of the drive. The contraction of muscles occurs mainly due to the tension force of the “skin”. This force is created by the difference in pressure between the internal and external fluid medium. Removing fluid from the actuator temporarily increases internal pressure. (D) Production process. A standard drive can be quickly produced in three simple steps: creating a frame using any of a variety of production methods; skin preparation; sealing of an airtight waterproof layer.
 Linear zigzag drives made by different methods from different materials
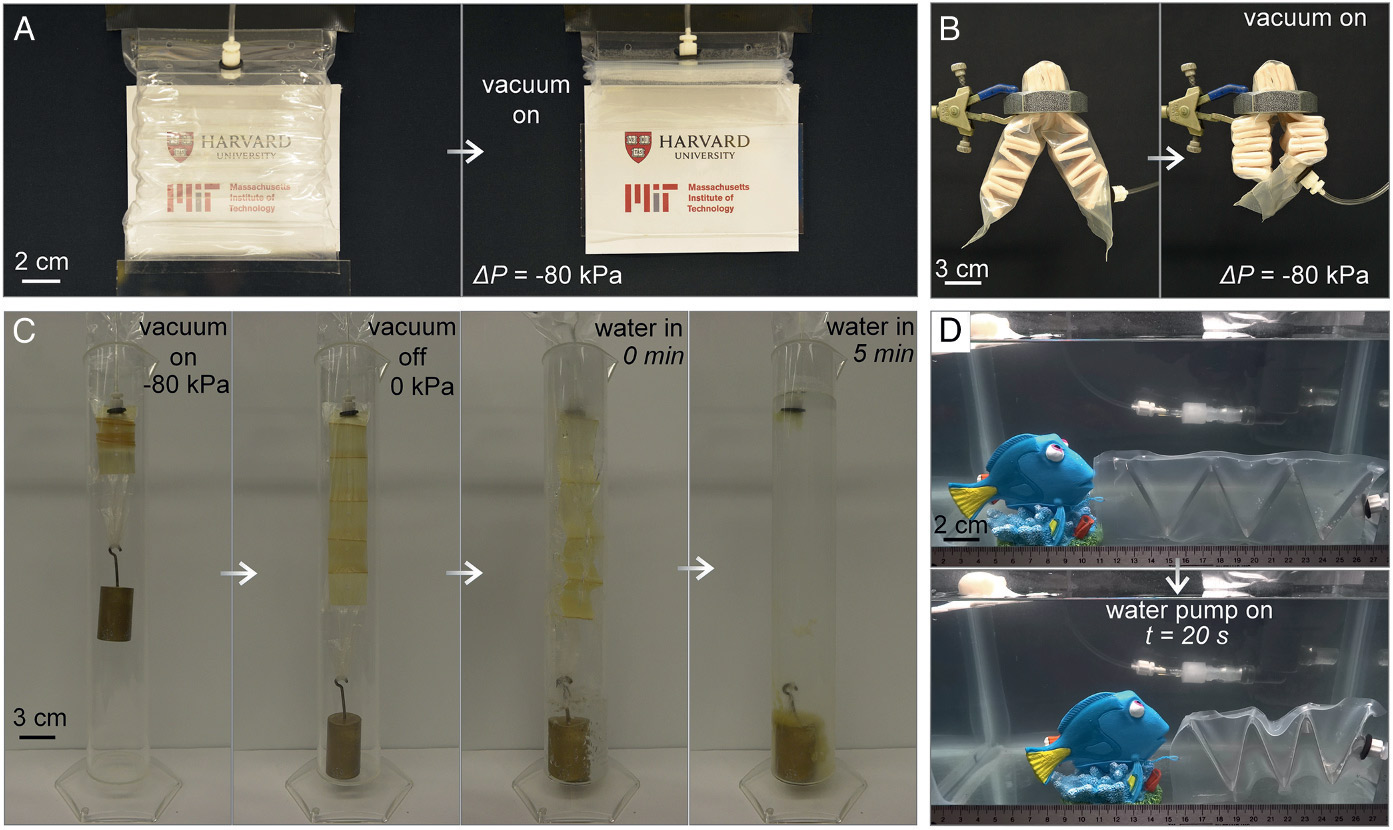
Linear zigzag drives made by different methods from different materialsPart A shows a thin, transparent drive that lifts the acrylic plate. Here the frame is made of transparent polyester fabric 0,254 mm thick using laser cutting and hand-folds. Skin: transparent PVC film (vinyl) 0.102 mm thick. Fluid material: air.
In illustration, a soft linear actuator works well even when encased in a metal nut. Frame and leather: silicone rubber and thermoplastic polyurethane 0.24 mm. Fluid material: air.
In the illustration C, the vacuum soluble drive dissolves in hot water at a temperature of about 70 ° C in five minutes. Both the frame and the skin are made of polyvinyl acetate. Fluid material: air.
Finally, the last illustration shows that the drive with water instead of air as a fluid material on the steel frame works successfully under water, in particular, moves a 3.5 cm fish.
“Drives of the type of artificial muscles are one of the most important tasks in general in engineering,” says Rob Wood, Ph.D., one of the four authors of the scientific work. “Now we have created drives with characteristics similar to real muscles, so you can imagine making almost any robot for almost any task.”
The scientific article was
published on November 27, 2017 in the journal
Proceedings of the National Academy of Sciences (doi: 10.1073 / pnas.1713450114,
pdf ).