Introduction
This article summarizes the project to create the satellite "Mayak", the first Russian satellite created by the hands of amateur astronautics and launched into orbit on July 14, 2017 from the Baikonur cosmodrome. A chronology of the project’s development, a list of basic technical and organizational tasks, a list of project participants at different stages are given.
Also in the article
, the resolved issues are marked in
this way , and
the marked mistakes made during the work are noted in this way .
In the text meets the pronouns "I" and "we". I am the author of this text and the head of the project “Mayak”, Alexander Shaenko, we are the team of the project “Mayak”.
So, let's begin.
The causes of the project "Mayak"
Any project has causes, thoughts or events that lead to its appearance, but are not yet a project as such. The main reason for the emergence of the project “Mayak” was the desire to change the state of affairs in our current cosmonautics.
We know that humanity sixty years ago went into outer space. We know that automatic interplanetary stations investigated all known large celestial bodies of the solar system. We know that space observatories are observing the Universe over the entire wavelength range of the electromagnetic spectrum. Manned spacecraft and research satellites are launched into space by many countries, so you can declare with responsibility that we, humanity, are exploring space.
A decisive contribution to the exploration of outer space was made by our country. At the beginning of the space age, it was we who launched the first artificial satellite of the Earth, first reached the moon and the nearest planets, the first to launch a human into space.
However, there are two subtle points in these statements.
First, great achievements in the field of space flights are a thing of the past. Gagarin flew in 1961, Armstrong set foot on the moon in 1969. Then it seemed that after these achievements others would follow: bases on the moon, flights to Mars and Venus, and others, and others, and others.
A natural discussion began that the professions of a cosmonaut scientist, a cosmonaut technician or even a cosmonaut welder would soon appear. That soon space flights will become a routine matter, as atmospheric flights began at one time. Indeed, who among the hundreds of passengers of an airliner is thinking about a romantic dream that has led flight enthusiasts from fragile linen ornithopters to fast-moving and reliable aircraft connecting continents? A similar expectation from astronautics, but this did not happen.
Secondly, how exactly am I, an ordinary person living ordinary life in Russia, able to explore the Universe and launch satellites into space? Not we, the Russian people as a whole or mankind in general, but I? Here it should be noted that this desire is not inherent in all. As during a flight on a jet plane of hundreds of people on board, only a couple of pilots and a few children enjoy flying, and very few people want to go into space. But if I personally want to launch my satellite into space, what should I do?
Usually in this case they say so. Study at school better, go to a good university, and after - go to work in the KB. The first thirty years you will be an engineer there, and then, closer to retirement, you will become the Chief Designer, and then you will be able to launch your satellite into space. Now this path is chosen very rarely, because there are better ways. For example, think up a brilliant business idea, take a bank loan or look for investors, assemble a team, design a satellite, launch it into space and earn money. But what to do if you do not want to make a satellite for money?
We, the developers of the “Mayak” project, have answered this question. We have proved in practice that a third way is possible. What can you think of a satellite with friends, without huge factories and complex laboratories, build it and launch it into real space? We hope that thanks to our efforts our cosmonautics will change a little bit, but new people, new ideas, new methods of work will come to it. We want people who care about space exploration to come into the space program. We expect that after Mayak it will be easier to make the next “own satellite”, since we already have our example and our experience.
This idea crystallized during conversations before a
lecture on the history of cosmonautics on December 24, 2013 with its organizers, Alexey Statsenko and Sokolov.
Formulation of the problem
At the very beginning of the project, before the formation of the project team, it was necessary to answer the following questions:
- If you make a satellite in order to attract as many people as possible to space exploration, what kind of satellite should it be?
- If you make a satellite with enthusiasts, so that anyone can take part in it, what should it be, so that enthusiasts can do it?
The answers were as follows:
- It is necessary to create a bright luminous object visible to the naked eye, while ensuring its promotion throughout the world as a satellite created by space enthusiasts. In addition, you need to publish all the materials of the project, so that anyone can repeat it.
- It is necessary to design a spacecraft so that during its production, testing and launching there is no need to use inaccessible resources - materials, equipment, test benches.
Variants of a satellite with a radio transmitter, with a camera photographing the Earth were rejected as requiring complicated ground-based receiving equipment from the “viewer”, as well as difficult to implement.
Gathering project team
Having formulated the requirements for the project, it became possible to begin the search for the project team. The participants of the first team gathered thanks to the
announcement in the
group “Your sector of space” of March 2, 2014.
The first project
meeting took place on March 5, 2014.
At the meeting came students and graduate students of MSTU. Bauman and MAI, who liked the idea of making a satellite with their own hands and launching it into space. The work of the team in this team lasted until about the beginning of September 2014.

Formulation of TK
In the course of the team’s work, the
terms of reference for the satellite was formulated,
which by then was named “Mayak”.
The most important question that we had to answer when forming the TOR for Mayak was
how to form a bright object in the sky?We considered a number of possible options, ranging from a repetition of the Soviet experiment
“Artificial Comet” , considered the installation on board of a satellite of bright light sources and ending with a solar reflector similar to the
American Echo satellite .
When analyzing possible options, the following question arose, no less important.
For what time to create a bright object in the sky? We considered that in the month of the existence of such a satellite, especially in an circumpolar orbit, that is, in an orbit in which the satellite flies around the whole Earth from pole to pole, it will have time to see it in all cities and it will produce its effect. In the case of a significantly shorter period, for example, several days, cloudiness and other problems could prevent to see the device in some areas of the Earth, in the case of a significantly longer time, the effect could hardly have been achieved, since during this time a bright asterisk crawling through the sky would all get bored.
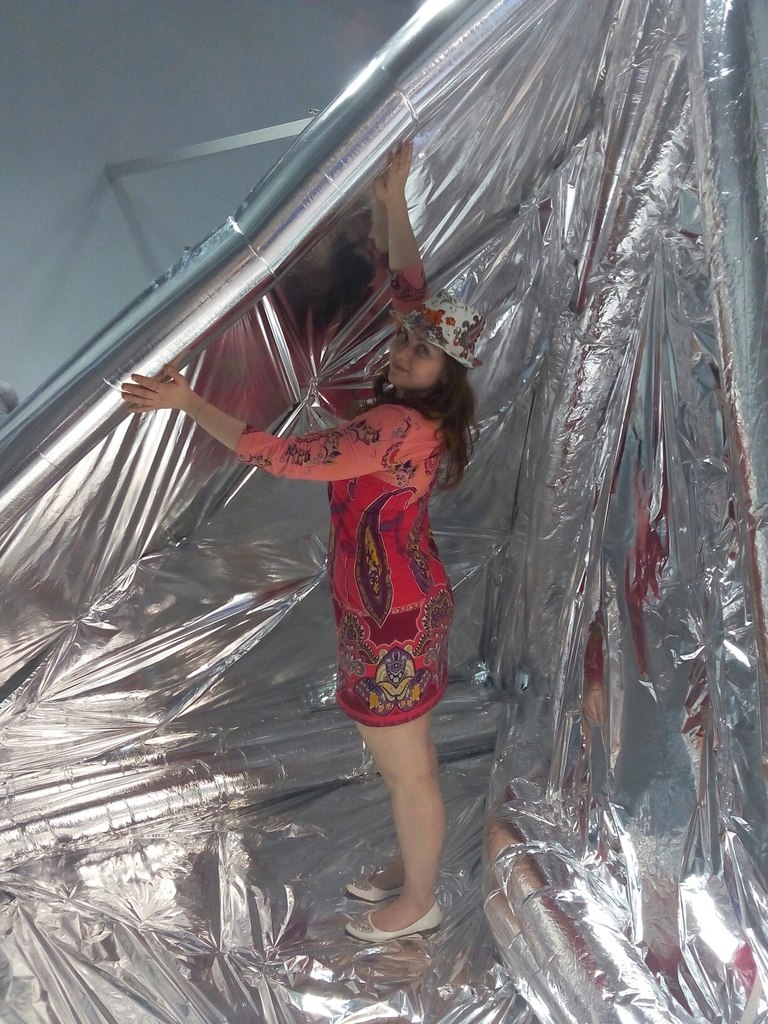
So, we began to focus on the time of the order of the month. Together with what we wanted to do and launch the device into orbit for any reasonable time, and not 10 years after the start of work, we decided to make the device as simple and cheap as possible. It was probably possible to start building a huge 8-ton starship with a nuclear bomb on board, but we wouldn’t have a chance to build it in fact and launch into orbit. These considerations led us to put metal sodium on board (where to get it, by the way? How to store?) As on “Luna-1” or expensive solar batteries with high-power diodes and orientation systems are not worth it, so we need a solar reflector, a kind of disco-ball in space, the glare of which would run around the Earth and look from the surface of the planet like bright flashes in the sky. This idea is shown in the photo.

Therefore, the question became -
what shape should a solar reflector have? This is not an idle question, since it is necessary to make the satellite as visible as possible to the observers from the ground, under numerous restrictions, that is, to make it as bright as possible, flashing as long as possible and with a large field of view. In the technical specifications we recorded flares with a magnitude of -8m, focusing on the flares of the Iridium satellites, with a brightness of up to -10 m.
The idea was simple - to bring our reflector closer and more Iridium antennas to get brighter flashes.
In order to achieve such brightness and to make the reflector as small as possible, we decided to conduct a study of the brightness of the flashes of reflectors of various shapes, which are in the same conditions. The following options for the solar reflector were analyzed:
- Flat triangular face
- The right tetrahedron
- Icosahedron
- Sphere.
The calculations showed that the optimal combination of flash brightness and a large visibility zone, as well as technological feasibility, is provided by a reflector in the form of a regular tetrahedron. This form was recorded in the TK.
After determining the shape,
it was necessary to determine the method of forming the solar reflector . Since the time of classes at MSTU. Bauman on the drop-down space structures, I remembered that the greatest value of the transformation ratio, that is, the ratio of the dimensions in the opened state to the dimensions in the folded, provide pneumatic structures. Usually they are made in the form of shells, compactly laid in a special way on board the satellite at launch, and filled with gas after going into orbit. Satellite "Echo" was just that. Therefore, the pneumatic frame of the solar reflector was adopted as the main option. It was supposed to be a shell in the form of cylinders, made of a thin film and filled with gas. The cylinders had to be interconnected in such a way as to form the edges of the pyramid and stretch the film forming the reflective surfaces. As a film for both the frame and the reflector, we decided to use one material - one-sided aluminized PET film of the NIIKAM company “Metallized polyethylene terephthalate film TU 2255-21680878-001-2001” 5 microns thick.
As a fallback, a mechanical frame was adopted - elastic profiles wound on a drum on Earth, reeling from space in space, forming three edges of a pyramid and stretching a film.
The next question is
how to launch a spacecraft into orbit? Having some experience in the space field, and knowing how much work is to integrate the spacecraft on board the launch vehicle, that is, developing a method of attaching a satellite to a rocket and justifying the safety and reliability of such anchorage, we decided to eliminate at least these costs and make our device in the popular worldwide
cubesat format. Initially, we were rather presumptuous enough to fit in a 2U Kubsat, but then we realized that it was better to focus on 3U.
Why is running Kubsat easier than a non-standard satellite? The fact is that a large number of launch containers have been developed for launching cubsat around the world, including in Russia, in which cubsat are inserted at the integration stage, and then, in orbit, are pushed out by springs.

Therefore, if your device is placed in a container, the integration problem is solved very easily and cheaply.
In addition to the requirements for overall dimensions, the format imposes a number of requirements on the internal equipment of the satellite. For example, it is not recommended to put on board high-pressure vessels, toxic and aggressive chemicals, explosives. In the same place, the standard says that it is possible with them, but there will be a lot of problems in coordinating the launch of such a dangerous satellite for fellow travelers.
After studying these additional requirements, the question arose of
what to fill the cavity of the pneumatic frame? After studying the limitations of the format, gas generators widely used on other pneumatic structures, such as acetone, compressed gases, and powder pressure accumulators, disappeared. In the end, we settled on harmless
ammonium bicarbonate , which is used in the food industry as a baking powder. It was planned to decompose it by heating and get water, ammonia and carbon dioxide, filling the cavity of the reflector frame with this mixture.
In addition, later we got the idea to use the same reagent to spin the satellite in order to rotate like that disco ball in a disco, it would cover the entire visible part of the Earth with its highlights. For the spin it was supposed to use a separate supply of reagent, decompose it by heating and release decomposition products through two nozzles, which would create a twisting moment. In the course of further development, it was decided to leave one nozzle so that it creates a moment twisting along all three axes of the device.
It is important to note that the development of “Mayak” was divided into two major stages - a product for a stratospheric flight and, after it, a product for launch into orbit. We considered that we would raise money to finance the project using crowdfunding, and it is unlikely to collect several million rubles for orbital launch at once. Therefore, we have set ourselves a simpler, more useful for the overall development of the project and, most importantly, an achievable goal - launching “Mayak” into the stratosphere in order to test it in close to space conditions.
The first crowdfunding campaign
Why exactly crowdfunding? The fact is that
the “Selenohod” team of the
Google Lunar X PRIZE competition , which was part of the “Mayak” team, was actively trying to raise money to work on their project by contacting various support funds, various deputies and officials of various levels, searched, unsuccessfully, for contacts of oligarchs and even one of the first to enter the space cluster Skolkovo. As a result of all this activity, I, the author of this text, had a feeling that this is not the best way to obtain funding for such a project as Selenokhod or Mayak. We were not going to make money, we were trying to bring something new to the world, a private lunar robot and a satellite made by the hands of space enthusiasts. It seems to me that in Russia there are now few willing to give money for it.
Therefore, when at the beginning of the project we learned about such a financing tool as crowdfunding, we decided to use it. In our opinion, this is the most honest way to get money for some business. You announce your project, explain in an accessible form what is its essence, and people who come to you either give you money or not.
In our particular case, we decided to collect money for something more real and cheaper than a whole large and expensive space launch. For example, to launch in the "Beacon" in the stratosphere. There, of course, is not outer space, but the conditions are also quite harsh, both in terms of temperature drops, and in terms of reduced air pressure. In addition, the launch there is an order of magnitude less, and therefore it is much more realistic to collect such money.
The first crowdfunding campaign was launched on July 25, 2014 and ended successfully on September 3, 2014, collecting 407,952 rubles. In more detail about the course of crowdfunding will be told in the
presentation about the second campaign . In the first, everything was about the same, only on a smaller scale.
I must say that by the end of the crowdfunding team enthusiasm faded, and it actually went. The second iteration of the team, most of which brought the project to the end, appeared after the crowdfunding.
It should be noted here that we have set ourselves a very optimistic timeframe for the stratospheric launch and space launch readiness - autumn 2014 and the end of 2014. In fact, the launch into the stratosphere occurred on October 19, 2015 (!), That is, with a lag of a year, and we scored the readiness to launch into space by September 22, 2016, with a lag of almost two years!Preparation of the orbital launch on the “Dnieper”
After the end of the first campaign, I began to look for information on how to launch our future Kubsat. First of all, I turned to my colleagues from
Sputnik , my long-time friends, who launched the first Russian private satellite
Aurora in 2014. They launched it on
the Dnepr launch vehicle with the help of the
Kosmotras company, so they knew what and how. And in the conversation it turned out that Sputnik became the seller of seats on this rocket in Russia. Colleagues made a commercial proposal, according to which the launch of our Kubsat 3U on the “Dnepr” cost about 8 million rubles. By the time when it was necessary to conclude an agreement and pay the first part of the money, I was already working at the University of Mechanical Engineering, the future Moscow Polytech, and I managed to persuade the then leaders to pay the first installment for this launch contract, 350,000 rubles.
In addition, I began negotiations with the
Dutch company ISIS, which is well-known in the world of cubers, to launch with their help. They offered to launch on “Dnepr” for 13.65 million rubles and launch on the Chinese “Great March” for 15,750,000 rubles. On their background, the offer of “Sputnik” looked extremely attractive.
However, closer to mid-2015, it became clear that the “Dnepr” would not fly. In this position, he is to this day. Therefore, it was necessary to look for another opportunity to run. And then
“Glavkosmos” appeared and offered a free launch!
But back to the technical tasks.
Pneumatic reflector prototype
At the beginning of autumn 2014, we, having TK and the money for its implementation, began to develop a version of “Mayak” for stratospheric tests. There were many interesting tasks!
How should the gas generators on ammonium bicarbonate be arranged in order to stably heat the reagent as it is consumed and, moreover, in zero gravity?
How to feed decomposition products into the solar reflector cavity?
What form to make the pneumatic frame of the reflector?
How to make a sealed reflector frame?
How to make reliable electronics to control the process of disclosure?
What chemical batteries to use to power the equipment?For ten months from the beginning of practical work, we were able to answer these questions and many others. By June 27, 2015, we were able to create a complete, in our opinion, project, to manufacture the “Mayak” mock-up and began to prepare it for the stratospheric tests, which we planned to hold on July 19, 2015 at the first
Summer Space School .
In the course of the work, it turned out that our initial estimate of the possible length of the 7-meter pyramid rib was seriously exaggerated. After practicing the layout of the solar reflector, it became clear that we could not accommodate such a volume of film in a 1U solar reflector container. Only a reflector with an edge of 3 m was placed in this volume. We began to develop it further.
In the process of developing the design, various large-scale models of the solar reflector were made - large-scale, with a frame edge size of 610 mm

and full, with an edge of 3 meters.
However, these works did not lead us to success in creating a working model of the reflector. We found that the sufficiently sealed frame of the solar reflector we can not. We were trained to weld and glue the film of the frame almost perfectly, but the created frame could not hold the pressure even for several hours! Chasing enough on our own curvature, we decided to seek advice from the manufacturer of the film, and he found out that the film with a thickness of 5 μm is essentially porous. Even being perfectly glued together, she would have let the air through.
It can be noted here that we began designing a version of the apparatus for stratospheric tests without being completely convinced that the full-scale solar reflector is working.However, the project’s defense had to tell about the work done, which we did on June 27, 2015.
Digital October project protection
I think that the state of the project at the time of June 2015 is most fully reflected in the
presentation prepared for it, the project of open defense and the very video of our presentation.
Preparation of the orbital launch with the help of Glavkosmos
Glavkosmos met with us at the very end of June 2015, possibly because of our protection at Digital October. “Glavkosmos” is a subsidiary of “Roskosmos”, established in 1985 as a department in the Ministry of General Engineering, which was involved in astronautics. The purpose of the creation of Glavkosmos USSR is the search and implementation of commercial projects in the field of astronautics. In recent years, this company has intensified and began to enter the market of commercial launches, creating a clear competition for Kosmotras, and this year having created a joint venture with it, Glavkosmos Launch Services. But this is all the lyrics.
When an official himself comes to you and offers to provide a service worth several million rubles for free, the first thing you want is to ask: “What's the catch?”. I was waiting for a dirty trick until the very moment when the Soyuz launch vehicle did not come off the launch complex, but it seems there was no dirty trick. We really did not pay a penny for the launch.
Negotiations with them began at the very end of June 2015. The University of Mechanical Engineering sent the first letter about the possibility of launching on July 3, 2015, on July 17, 2015 sent the completed certificates stating that the device represented itself, that it did not have rocket tracking devices on board, that it was not explosive, and so on. In response, on July 23, a letter arrived that “Mayak” would be launched as an associated cargo together with the “Canopus-V-IK” satellite, and then December 2015 was called as the launch time!
After that, there was a pause in our documentary relations until February 2016, when the Glavkosmos began to provide the Interface Control Document (ICD in English), in which it was necessary to indicate the real dimensions of the Beacon, its mass and moments of inertia.
After this, from the end of March 2016 we tried to achieve a launch agreement between Glavkosmos, Roskosmos or someone else responsible and the University of Mechanical Engineering. These negotiations lasted for a year (!!!) and did not lead to anything in the end. Roscosmos joined the correspondence, but it did not help either.
Why was a contract needed at all? The fact is that from the very beginning of the negotiations it was not clear how free the launch would be. Is the launch itself free or even integration services, delivery services to Baikonur? Who and what documents, in what time to provide? What is the responsibility of the parties?
Without a contract, all these questions remained only the subject of personal agreements. Actually, they remained so. In the end, I repeat, we did not pay the money for anything, but it was quite exciting.It was especially exciting when the time came to transfer “Glavkosmos” “Mayak” for transportation to Baikonur. My colleagues and I prepared acts of transmission, installed seals and impact sensors on our suitcase with a satellite, put the numbers of seals and sensors into an act, and colleagues from Glavkosmos simply refused to sign such an act, citing the absence of a contract. “Just leave your suitcase here,” they said, “then you will see it at Baikonur.” Nothing happened to “Mayak” and the suitcase, but again, it was exciting.Despite all the paper problems, work on the satellite continued.Mechanical prototype reflector
After the project was defended, we began to prepare for launch into the stratosphere, switching from unsealed PET film to tested polyethylene. Such a frame is guaranteed not to fit on a Kubsat 3U board because of the very thick film that could not be laid compactly. However, such tests would allow all other elements to be tested in operation — the reactor, the flow of decomposition products into the framework cavity, electronics, and batteries.However, there was another problem on our way. During ground tests on July 19, 2015, it became clear that the hot decomposition products of ammonium bicarbonate, coming from the reactor in gaseous form, are cooled in the reflector and become solid without creating pressure. This brought us to the idea that we need to abandon the pneumatic frame and go to the spare, mechanical version. The decision to develop a mechanical frame was taken on July 19, 2015. As a result, we were forced to postpone the announced stratospheric launch before the end of the development and ground tests of the mechanical frame of the reflector.The main issue in the design of the mechanical frame of the reflector -How to assemble drums with coiled profiles so that they ensure the formation of a pyramid and at the same time take up as little space as possible? Let me remind you that we decided to use elastic profiles, which were wound on the drum in the initial state and transferred to the unfolded state with the help of a drive, as a backup version of the reflector frame. Something similar was implemented in the project LightSail-1.The similarity with LightSail-1 is obvious, but there were a number of differences in our design. We needed to form not a flat square, but a volumetric tetrahedron, and besides, we did not have the opportunity to develop a special elastic profile for ourselves. The lack of a special profile made us stop at building construction roulettes. I must say that roulettes are almost a generic sign of a Kubsat. They have been used many times as drop-down antennas or elastic elements.
Such a frame is guaranteed not to fit on a Kubsat 3U board because of the very thick film that could not be laid compactly. However, such tests would allow all other elements to be tested in operation — the reactor, the flow of decomposition products into the framework cavity, electronics, and batteries.However, there was another problem on our way. During ground tests on July 19, 2015, it became clear that the hot decomposition products of ammonium bicarbonate, coming from the reactor in gaseous form, are cooled in the reflector and become solid without creating pressure. This brought us to the idea that we need to abandon the pneumatic frame and go to the spare, mechanical version. The decision to develop a mechanical frame was taken on July 19, 2015. As a result, we were forced to postpone the announced stratospheric launch before the end of the development and ground tests of the mechanical frame of the reflector.The main issue in the design of the mechanical frame of the reflector -How to assemble drums with coiled profiles so that they ensure the formation of a pyramid and at the same time take up as little space as possible? Let me remind you that we decided to use elastic profiles, which were wound on the drum in the initial state and transferred to the unfolded state with the help of a drive, as a backup version of the reflector frame. Something similar was implemented in the project LightSail-1.The similarity with LightSail-1 is obvious, but there were a number of differences in our design. We needed to form not a flat square, but a volumetric tetrahedron, and besides, we did not have the opportunity to develop a special elastic profile for ourselves. The lack of a special profile made us stop at building construction roulettes. I must say that roulettes are almost a generic sign of a Kubsat. They have been used many times as drop-down antennas or elastic elements.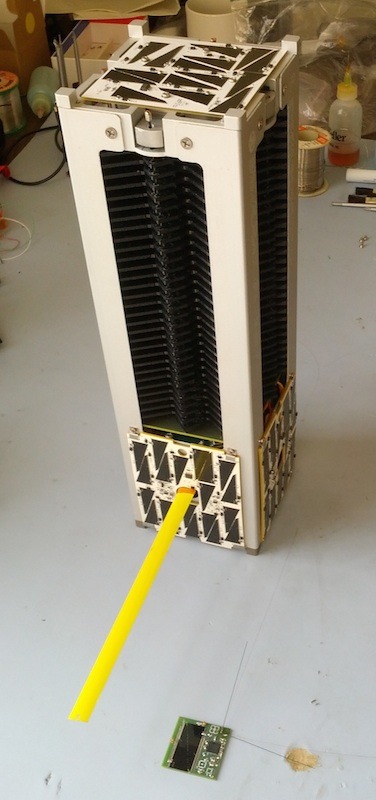
 The first prototype of our mechanical frame was designed and manufactured by Gleb Lubin . Here is his look and way of working.On one axis, located transversely with respect to the direction of release of the roulettes, there are three drums with roulettes wound on them. Roulette ends are fired out through individual shapers. Each drum is driven by its own electric drive. The internal structure of this variant is shown in the figures.
The first prototype of our mechanical frame was designed and manufactured by Gleb Lubin . Here is his look and way of working.On one axis, located transversely with respect to the direction of release of the roulettes, there are three drums with roulettes wound on them. Roulette ends are fired out through individual shapers. Each drum is driven by its own electric drive. The internal structure of this variant is shown in the figures.
 The second option was developed by Denis Efremov. In its version there are also three reels with roulettes, but their axes are located in increments of 120 degrees and perpendicular to the general direction of opening of the roulettes. The principle of operation and appearance (and internal too) are shown in the videoBoth options are shown in the figure.
The second option was developed by Denis Efremov. In its version there are also three reels with roulettes, but their axes are located in increments of 120 degrees and perpendicular to the general direction of opening of the roulettes. The principle of operation and appearance (and internal too) are shown in the videoBoth options are shown in the figure.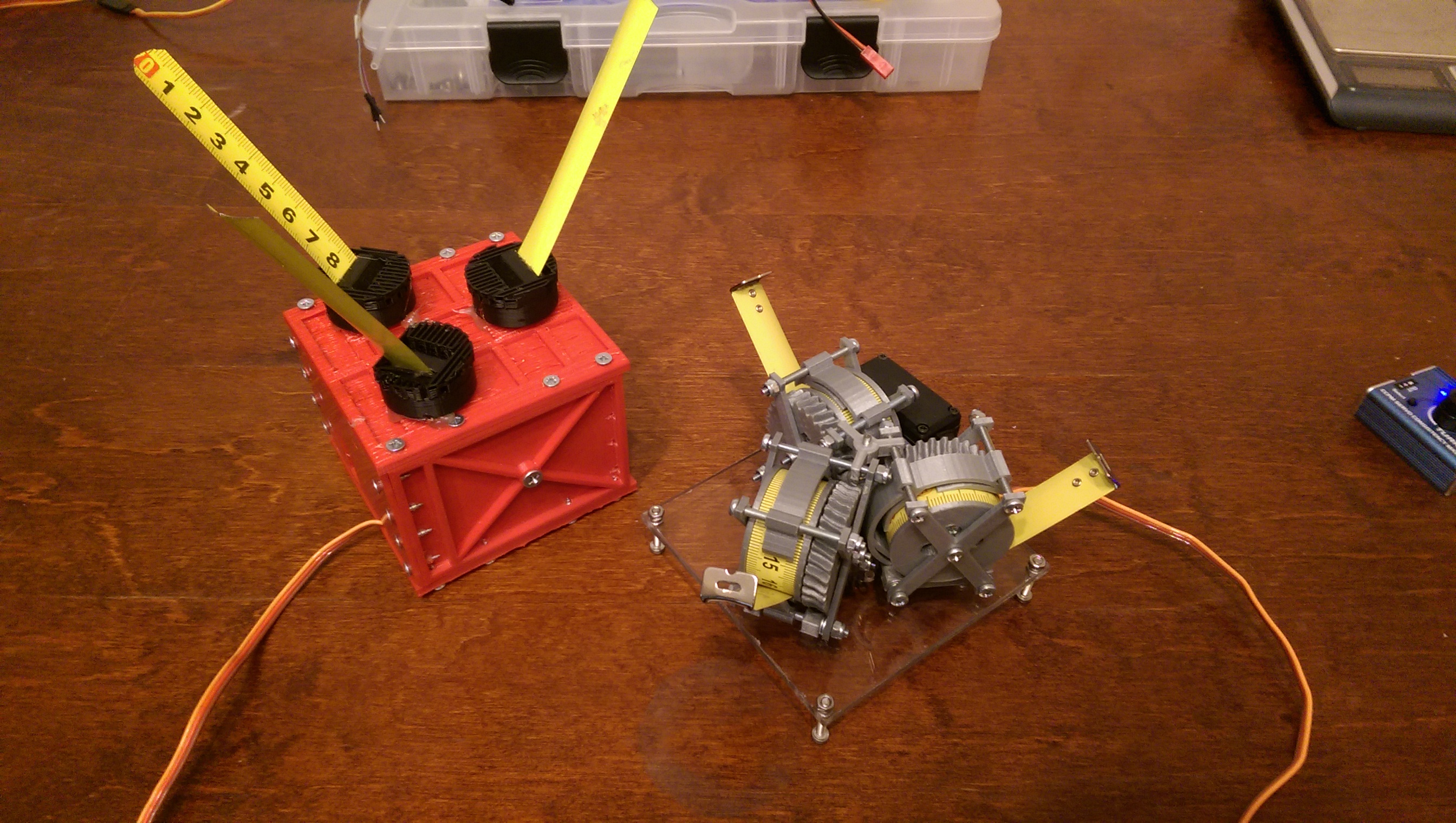 Denis prepared a version for stratospheric testing that resembles Gleb's version. It had one drum, divided into three areas by separators. The drum was driven by a single electric drive. Three roulettes went out through the three shapers and pulled the film out of the container. The appearance of the variant for stratospheric tests is shown in the figure.
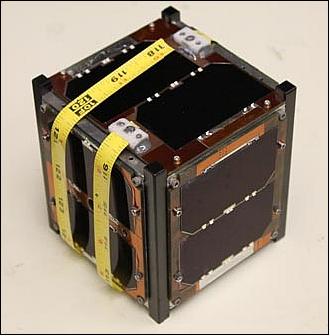
Denis prepared a version for stratospheric testing that resembles Gleb's version. It had one drum, divided into three areas by separators. The drum was driven by a single electric drive. Three roulettes went out through the three shapers and pulled the film out of the container. The appearance of the variant for stratospheric tests is shown in the figure. The assembled model of the “Beacon” before stratospheric tests looked like this.
The assembled model of the “Beacon” before stratospheric tests looked like this.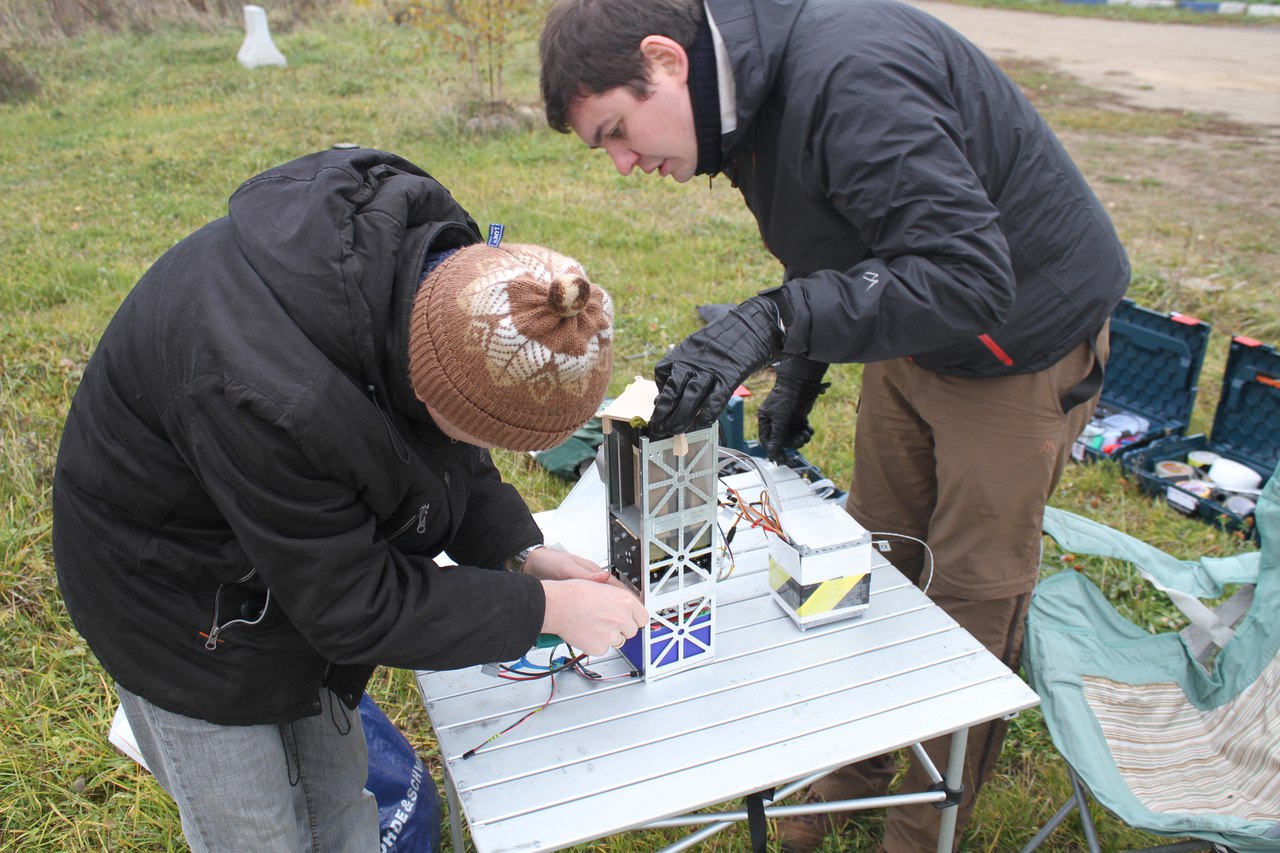 Parts of the layout, from bottom to top:
Parts of the layout, from bottom to top:- The blue block - the rechargeable battery,
- Gray metal block - reactor,
- Black block with lots of nuts - opening mechanism,
- Everything above is a container with a film,
- The topmost beige detail is the lid of the film container.
Separately, to the right is the telemetry and test management unit, which was supposed to issue a command to turn on the “Beacon” and record its parameters during the course of work.Before the story of the stratospheric tests, I note that when working on the mechanisms for opening the solar reflector, we tried out in practice the idea of using a 3D printer to prototype satellite nodes. On the stratospheric layout, 3D printing was used sparingly, but in the next development steps we applied it much more widely.Stratospheric testing
The launch into the stratosphere took place on October 19, 2015 from the Mill airfield near Pereslavl-Zalessky, in the Yaroslavl region.The flight went:- the layout itself,
- telemetry and test control unit
- GPS-, .
In a real space flight, the switch-on command appeared after the satellite exited the transport and launch container in which it flew on a launch vehicle, and in the stratospheric test it was necessary to simulate the release of limit switches.In general, the flight was normal, the probe rose in the rays of the setting sun to an altitude of 20 km, and then gently landed on a parachute. But, unfortunately, the telemetry and control equipment hung and started to reboot during the flight, so it did not issue a command to activate the satellite. He landed without even starting.Nevertheless, in the process of launch preparation we received a lot of useful experience for the development of the flight mechanism, and the vehicle as a whole, and therefore we decided not to conduct repeated stratospheric tests.I think that this can also be called a disadvantage of our ground testing. We began the development of working documentation for the flight of the spacecraft, without re-conducting stratospheric tests.
But, unfortunately, the telemetry and control equipment hung and started to reboot during the flight, so it did not issue a command to activate the satellite. He landed without even starting.Nevertheless, in the process of launch preparation we received a lot of useful experience for the development of the flight mechanism, and the vehicle as a whole, and therefore we decided not to conduct repeated stratospheric tests.I think that this can also be called a disadvantage of our ground testing. We began the development of working documentation for the flight of the spacecraft, without re-conducting stratospheric tests.Development of working documentation
After carrying out the stratospheric tests, the project was suspended. The money for the continuation of the work ended, the enthusiasm faded due to the unsuccessful carrying out of stratospheric tests. Nevertheless, we had a not fully confirmed agreement on launching with Glavkosmos and launch negotiations with Sputnik, so the satellite had to be made.And then the company "Yalini"with a proposal to help with the development of the working design documentation of “Mayak” in exchange for the possibility of installing its own electronics and transmitter on it. We, the project team at the same time acted as consultants who shared their experiences and previous developments. We agreed to work together under such conditions, but indicated that coordination of the possibility of installing a radio transmitter aboard the Mayak takes over Yalini.Looking ahead, I will say that it was this moment that caused us to part with them. When applying for a launch at Roskosmos in June 2015, we wrote that there would be no radio on board Mayak. Yalini, approximately six months after our statement, it was necessary to change this decision in Roscosmos. Changes could not be agreed upon, and approximately in January 2016, our agreement effectively ceased to operate.Nevertheless, the joint work continued until June 2016, when it was necessary to carry the layout of “Mayak” for fitting, to which colleagues from “Yalini” strongly suggested to install inconsistent antennas. I could not take such a step, since I thereby led the rector of the Moscow Polytechnic, who signed the letter of the absence of a transmitter on board the “Mayak”. Well, on the whole, such an approach put the possibility of launching “Mayak” in principle under a serious blow.But in December 2015, everything was still normal and development began after the first meetings in the same month. The company gave us four designers, who became involved in the project with partial employment. It's funny that two of them, Rodin Ayupov and Irina Prosvirina, are students from MSTU. Bauman, who were engaged in my research work just for “Mayak”.In December 2015 and January 2016, the development of drawings, 3D models and electrical circuits of the Mayak flight was actively pursued. Around the beginning of February 2016, a flight version mock-up, completely made on a 3D printer, was ready. Then began his tests. And just on February 1, our second fundraising campaign began.The results of the development, drawings, 3D-models and electrical diagrams can be found here .Second crowdfunding campaign
Our second campaign of crowdfunding was launched on February 1, 2016 and ended successfully on March 10, 2016, collecting 1,993,146 rubles.
The first thing we found in this method of obtaining funding, in crowdfunding, is that the number of visitors to your page on the platform is directly related to the size of your fees. More people came - more people left money.
It turned out that the initial advice, including from the “Bumstarter” platform, that it is necessary to involve as much media as possible in covering the project, is only partially correct. Not all publications, interviews or plots about the project lead to an increase in page traffic and, consequently, to an increase in fees. From the end of January to mid-March I had to give several interviews per day, write several articles for different publications and, to put it mildly, not all led to an increase in attendance. There were many useless for growth of attendance of publications, below I will list those that were not useless.
It turned out, by the way, that many articles had to be written by oneself, since our PR guys, who were previously engaged in washing powders and soda, are not able to write a distinct technical text. This was another discovery.
Separately, it is worth noting that it is very useful not for financing, but for the technology
publication by Philip Terekhov . Many useful thoughts occurred to us after disputes with commentators. Moreover, as a result of our conversation, commentators developed their own, independent
model for calculating the apparent stellar magnitude of “Mayak” ! Thank them very much for that! After their calculations, I did not say that the “Lighthouse” would be the brightest object after the Moon, I said that it would be just a bright, visible eye companion.
If we talk about the most successful channel to promote the project and increase its attendance, then it was a
movie by Jan Lapotkova AKA Topless. Then we invited him to the launch, and there, too,
was quite soulful .
It turned out that not all publications of video bloggers are equally useful. For example, a fairly well-known channel with 4.8 million subscribers
said about us, but it did not cause any noticeable effect. In Lapotkov, by the way, there are 1.5 million subscribers. Perhaps the fact is that in the first case it was obvious that the author of the video was interesting to himself and this interest was transferred to the subscribers.
The most successful channel for obtaining funding in terms of the number of rubles per visitor was the visit of the
famous patron Boris Zhilin , who increased our fees immediately to 1.5 million rubles.
The most successful publications were the
post of Vitaly Egorov and the
plot of the First Channel .
They brought the most money from all media except Jan Lapotkova. And, as it would not be surprising, the impact on the fees of the space blogger and the federal TV channel was comparable.
Well, it should also be noted some excitement at the beginning and at the end of the campaign, which probably always appears. At least in our both campaigns he was.
Numerical values and graphs can be viewed in the
presentation of crowdfunding campaigns .
By the way, after a successful campaign on Bumstarter, we had
an unsuccessful campaign
on Kickstarter . At it, we realized that the methods of working with the audience and sponsors that we have mastered in Russia do not work abroad.
Production and Purchasing
At the beginning of March 2016, money reappeared, the search for suppliers, production orders and procurement planning began. These issues were also dealt with by colleagues from Yalini.
They distributed orders for the production of the mechanical part to two suppliers,
Rallivorks and
Intechpro . I recommend the first, the second - no.
The electronic part was ordered in
“Rezonite” .
Batteries we put the
“Super Flashlight ”.
Reflector film was provided free of charge by
NIIKAM .
We bought fasteners
in the store with a beautiful name .
Small parts for electronics were bought in
“Chip and Dip” , gearmotors in the
“Electric Drive” , and the excellent VK-9 glue was from
Svyazstroydetali .
The first finished parts arrived on May 26, 2016, and literally four days later we began to assemble the flight copy.
Assembly
The assembly on May 30, 2016
began in room A-11 of the Fablab of the Moscow Polytech.
Movie with our heroic assembly and file finishing of flight parts can be viewed.
Assembly as an assembly, not worse than others, probably, but what disadvantages for it can be noted.
1. A thorough preparation of all the necessary was not carried out. During assembly all the time there was a need for some little things that could be foreseen with more thorough preparation, and for the purchase, the search, the manufacture of which had to be distracted.
Not enough screws with a secret head - I had to go after them to the other end of the city. No studs 100 mm long - you need to cut them from the long. There is no alcohol for degreasing - you need to look for it and buy it. This is only part of the examples.
2. The absence of connectors between the nodes of the device. For various reasons, we decided to deviate from the requirements of our own TZ, which clearly stated, “Structurally, product systems should be autonomous units connected by mechanical, electric power and information connections.” We were worried about the possible heat dissipation in the connectors, but in the end we got a lot of problems related to the impossibility of partial disassembly of “Mayak” and the impossibility of autonomous testing of the nodes.
Then, with hindsight, I remembered that B.E. Chertok in his monumental work
“Rocket and People” . They were surprised by the electrical connectors that German engineers used in large quantities on the V-2, while on Soviet products everything was connected by soldering.
3. Non-technological mechanism for opening the frame of the solar reflector. Paraphrasing the well-known phrase “There is nothing more eternal than what is wrapped in blue electrical tape,” I would say that there is nothing more often that needs replacing than what should work once. Our elastic profiles, which were supposed to open only once during the flight, required multiple disclosures during assembly and ground testing. And, naturally, after each disclosure, they wore out a little, especially strongly after an abnormal one, with large creases.
In the end, the roulettes needed to be replaced, and it turned out that in order to tighten the three screws that pressed the ends of the roulettes to the drum, it was necessary to disassemble ALL of the opening mechanism, since the nuts for these screws are inside the drum and turn, and do not abut when you try to tighten the screw in them. Nuts in the drum, and the drum between the plates, which are connected by the very chopped in place studs. Therefore, you need to unscrew all the studs, remove and disassemble the drum and hold the nuts inside, tighten the screws in them.
In the most extreme case, we had to drill this ill-fated three nuts to replace the tape measures. Drill on the ready, flying satellite! Why, see the next item.
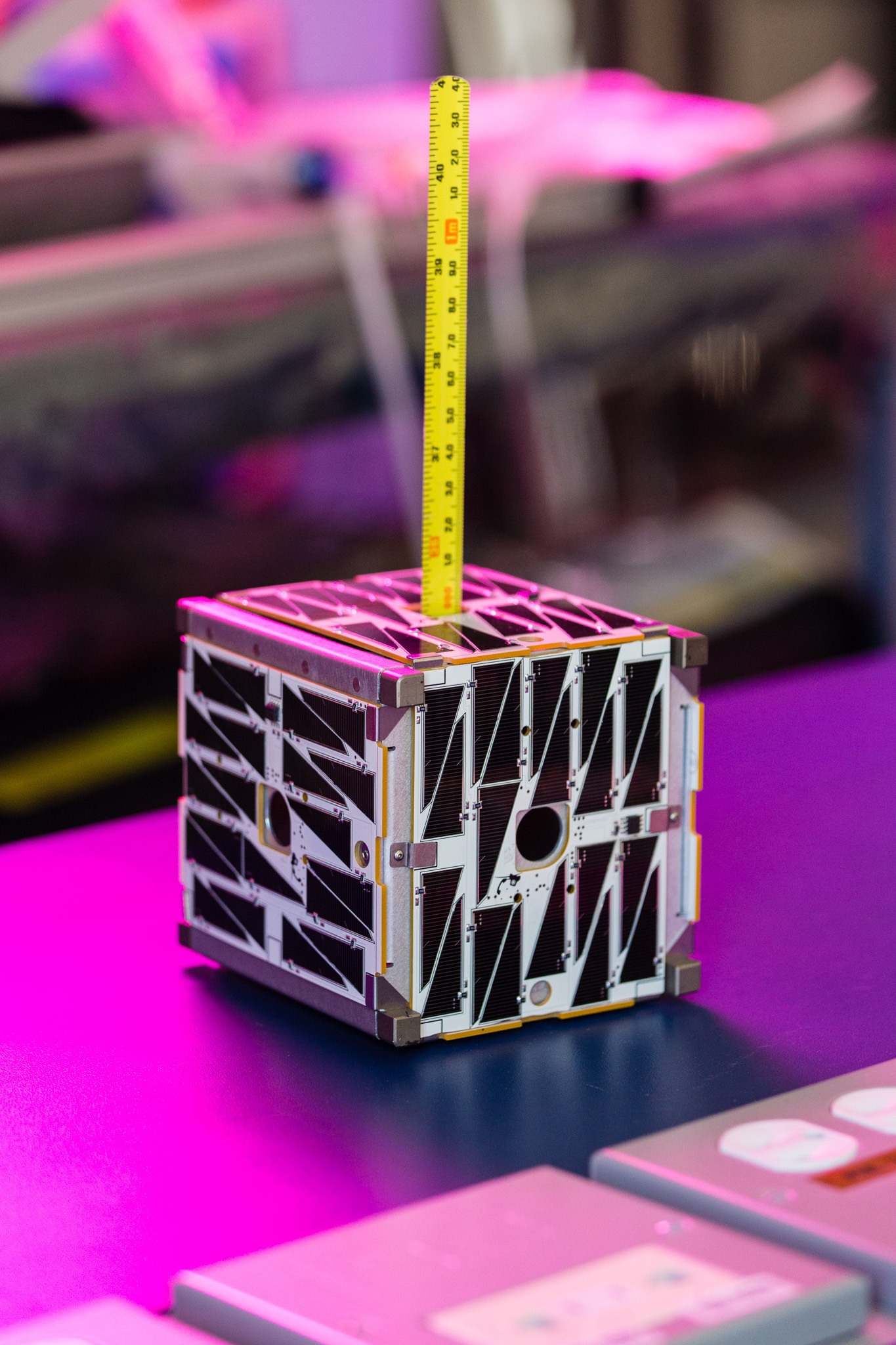
4. Maintaining the overall dimensions of the device. After the revelation with the replacement of roulettes, we disassembled the disclosure mechanism several more times in order to adjust its transverse dimensions with the help of twisting the studs. In fact, the plates, between which the drum with roulettes was located, were interconnected by six long studs, and in order to adjust the distance between the plates, it was necessary to twist the studs. All this was necessary in order to get into the overall dimensions of the transport and launch container 100 mm x 100 mm with a tolerance of ± 0.1 mm. In the end, we hit them. At the very least, our calipers told us that the dimensions are all less than 100.1 mm.
But when we arrived at the first fitting for the flight container mockup, it turned out that we were entering the container, but we could not get out of it! At first we thought it was a mystery, because we had all the dimensions in tolerances, but then we realized that the “Beacon” led “screw”. We found a calibration plate with a smooth surface and actually found the “screw”. Without a calibration plate, only with a caliper, we could not do it. Since the stove was not ours, but it was necessary to assemble it, we made exact squares giving exactly 90 ° and collected them.
5. Non-technological reactor placement. Again, this was a clear departure from the TK, which I, as the project manager who controlled the work of the designers, allowed. In the statement of work it was clearly stated: “The reactor must allow recharging without disassembling the pneumatic circuit or the entire spacecraft,” however, this requirement could not be met. To recharge the reactor, it was necessary to take it out of the apparatus case and thereby bring down the exact size adjustment.
But, nevertheless, we completed the assembly of the “Mayak”, the flight copy and the overall-mass layout, on July 27, 2016. But, oddly enough, the tests began before the end and even before the assembly.
Tests
The first tests of “iron” under the “Mayak” project were held on December 28, 2015. Then we tested the gearbox type IG-22CGM on the performance at temperatures lower and higher than indicated in his passport. The motor-reducer worked with a load at - 45 ° three times, at room temperature 20 ° two times and at 80 ° - three times. The operation time at each start was 10 minutes, the minimum break time between tests was 5 minutes.
The following tests took place on February 28, 2016. It tested the system of disclosure of the solar reflector assembled with container doors and all the satellite assembled from plastic, 3D-printed parts. Spring-loaded sash opened, roulette moved to 3 meters, stretching and turning the reflector. The test was considered successful.
On March 1, 2016, the same gear motor began to undergo tests in vacuum at a pressure of 10–4 Pa (10–6 mm Hg) under a similar program. However, during the test, an oversight was cooled to -72 ° C, worked at this temperature for about a minute, and failed. Due to the irregular temperature, the test was found to confirm the performance of this type of gear motor in vacuum at lower temperatures, although it would have to be repeated anew, on a new model. At the same time, a sample of an onboard computer was tested in the same chamber, which worked successfully even at -72 ° C.
After these tests, production and assembly began, but nevertheless, a number of experiments were performed. On April 21 and May 6, 2016, we measured the thermo-optical properties of electroplated coatings, which were supposed to be applied to the outer surfaces of “Mayak”, turned into space. Tests were carried out on the equipment of
TsNIIMash and NIIKAM. According to the results of the tests, a deep black polished AnOx coating was selected.
After this, the following tests can be called performance testing of the deployment system, assembled from flight parts, and fitting the device to the model of the Glavkosmos transport and launch container.
The assembled device was already subjected to complex tests.
On June 20, 2016, heat and vacuum tests of the flight of the “Mayak” were successfully carried out with the disclosure of the reflector frame in a vacuum.
On August 30-31, 2016, the VIA Nuclear Research Institute of Moscow State University successfully passed preliminary vibration-dynamic tests (VDI) of a flight model of the Mayak spacecraft (SP) and its dimensional mass model.
On September 9-13, 2016, validated vibration-dynamic tests of the flight of the “Mayak” took place at NIIEM. This gave us the opportunity to take a seat on the Soyuz launch vehicle, but it destroyed our batteries, which required repair. In the section "Analysis of the results of the flight" about this will be more.
In addition, the test can be attributed to the measurement of the voltage on the battery after its long-term storage in the satellite. This was done on March 23, 2017. The charge was more than 95% of the nominal capacity; no imbalance of the elements was detected.
The following and recent tests of the flight copy of the “Beacon” were already held at Baikonur during the integration into the composition of the space head.
What disadvantages can be noted when planning and implementing a test program?
1. Lack of consistency in test planning. The list of tests carried out and especially their results suggest that the ground testing of key systems was not carried out completely. The fact that the complex tests of the work of “Mayak” in vacuum were successful can be considered rather a success than a logical consequence of a well-thought-out and implemented test program. And the destruction of the battery is already on the complex testing of the entire apparatus can be considered a completely unacceptable error caused by a frivolous attitude to the effects of vibrodynamic loads.
2. Excessive confidence in the ease of passage of VDI. The frivolousness of conducting vibrodynamic tests (VDI) was caused personally by my previous work experience, the MAXET vibration tests of the DX1 apparatus. The DX1 model was a power structure of a real apparatus with dimensional mass models of equipment installed on it, that is, these were solid pieces of aluminum that simulated the mass and overall dimensions of real devices. In fact, then tested the strength of the hull and fasteners. In many ways, therefore, vibration tests were carried out without any complications.
In our case, the flight version of the device with all the standard instruments was tested, and every one of the instruments was a new development and did not pass through the VDI separately. A more reasonable approach, according to current ideas, was to carry out the VDI of individual devices, eliminate the identified deficiencies in them, and then conduct complex vibration tests of the assembled apparatus. The same approach for good it was necessary to implement and with heat vacuum tests (TVI).
Presentation of the finished “Mayak” at the Moscow Polytech
On September 22, after the testing of the flight Mayak and its successful fitting into the Glavkosmos transport and launch container, we held a
press conference at which we publicly announced that Mayak was ready to launch. There were representatives of Roskosmos, Boomstarter, there was Jan Lapotkov, and the rector of the Moscow Polytechnic Andrei Nikolaenko congratulated us.
The news from the Polytech said that “Mayak” was created within the framework of the educational program “Modern Cosmonautics” with the participation of students. And this is the true truth! “Mayak” is one of the first and one of the few student satellites, not university satellites. It was made by students, not a large space enterprise commissioned by the university. He was worked on by three students of my bachelor’s educational program, which was created at the Moscow Polytechnic Institute to graduate engineers who have both theoretical and practical training in the field of space technology. At the time of commencement of work, students were in the first year and then took part in the testing. Later, the guys developed a layout of the solar reflector and independently implemented it on a flying spacecraft. Alas, not all of them were able to go to the launch, but nevertheless, they took the most active, creative part in the creation of a simple but real satellite.
I especially envy Sergey Kalinkin, who in the summer after his second year, first went to launch his companion to Baikonur, and then went to Kapustin Yar to
launch his payload of 100 km on a suborbital rocket!
Unfortunately, the educational program “Modern Cosmonautics” is now closed. The university has changed the manual, and it was not needed.
Integration at Baikonur
After the presentation, we waited a long time for the announcement of the exact launch time, and finally, on April 4, 2017, Glavkosmos announced that the launch would be on July 14, and the trip for integration, that is, to install the aircraft in a flight container and bring it into flight state, will be in the middle of June.
Before all this, we checked the batteries, they turned out to be in perfect order, and we carried out the final fitting of the flight apparatus into the flight container, everything also went without comment.
From July 20 to July 23, 2017, a group of three people went to the integration to Baikonur:
Alexander Shaenko, project manager,
Sergey Gorgots, an electronics developer,
Mikhail Lavrov, chief designer.
We were at Baikonur for the first time, and he made an indelible impression on us, especially the spaceport. Actually, the cosmodrome is the same as astronautics in its pure form. And it looks accordingly. If you have been to a space enterprise or have worked on it, and have seen it not only from the front side, then you can easily imagine the city of Baikonur and the cosmodrome.
The integration itself took place in the assembly and test case (MIC) at site No. 31, this is the rightmost flank of the cosmodrome. Our launcher from MIK was only 700 meters, but we were not allowed to go there.

What did we do on integration. First of all, they checked the condition of the batteries and the on-board computer, they were fine. After that, they inserted “Mayak” into the flight launch canister and pulled the check from the satellite. With the check installed at the exit from the container, no current is supplied to the on-board electronics, and the “Beacon” would not turn on.
They dragged the check out, checked whether the spring pushes the satellite out of the container, pushes it out, checked whether the “Beacon” is turned on, turns on. At the end of the work, the device was inserted back into the container, the electronics were reset and the container was closed. This is where our work on the device is over! Back we flew with Misha on the heroic Tu-154M , which made an emergency landing in Izhme!
Back we flew with Misha on the heroic Tu-154M , which made an emergency landing in Izhme!Launch
The launch of “Mayak” took place on July 14, 2017 at 09:36:49 Moscow time or at 12:36:49 pm in Baikonur from the starting position No. 6 of the site No. 31. Our satellite flew a cargo on the Soyuz-2.1a launch vehicle with the Fregat upper stage. The main payload of this launch is the Kanopus-V-IK satellite of the Earth’s remote sensing, the following satellite - 72 spacecraft, of which 67 cubic meters. “Frigate” provided the breeding of satellites in three different orbits. The estimated flight program is available on the Roscosmos website.I must say that everyone from the project team and part of the participants in the Summer Space Schools 2015-2017, went to the launch of “Mayak”, 32 people altogether.“Mayak” was in orbit in free flight about 3 hours after launch, so that evening we went to the shore of the Syrdarya to watch its first night flight over Baikonur. At estimated times, both the satellite developers and unfamiliar viewers saw bright, non-periodic flashes of the satellite. Personally, I did not see one, but at the same time the jubilation was universal!But later it turned out that those were not the flashes! We confused the direction of arrival of the device, looked the other way and saw flashes of something else. It's funny that we looked to the south, because we thought that once the rocket flew to the north before our eyes, then, having rounded the Earth, it would arrive from the south. We did not take into account that in 10 hours after the start, the Earth will have time to turn around its axis of rotation and will substitute us to the orbit from the other side :) Avideo about our launch, the video of the launch itself, our feelings and how we searched for “Beacon” can be found in Michael's article .I note that a conversation took place there at Baikonur, which convinced me once again that the idea of making “Mayak” was correct. Even on the way to the city, before the launch, Julia Alferova contacted me, then a representative of the administration of Baikonur, and offered to give a lecture for schoolchildren and students. I agreed, but said that it would be possible after launch. We are going to launch our satellite here. Run - please.In addition to the lecture for the evening after the start-up, a meeting was scheduled with the city car enthusiasts who were interested in how they drove by car from Moscow to Baikonur. I offered to combine these two events, a lecture and a meeting, to which the motor-car guys responded with a phrase that just killed me. It sounded like this: “We work at the cosmodrome, we are not interested in cosmonautics”!Flight Results Analysis
By August 7, 2017, analyzing the search results of “Beacon” by astronomers and data on the objects of our launch in the NORAD catalog , we came to the conclusion that “Beacon” was not revealed and therefore we do not observe or manifest itself by a rapid decrease in orbit. In more detail about why we think so, is written in the article .After such a conclusion, we began to understand what could be the reason for the refusal of “Mayak”. We collected open statistics on the failures of our fellow travelers. There were surprisingly a lot of those who failed, as many as 10 devices, including ours. At first we decided to check ourselves, to look for the internal causes of the failure of “Beacon”. Therefore, we waited for the receipt of the “Mayak” model from Baikonur; After all the tests, “Mayak” still worked and opened up, that is, we did not find the internal reason for its refusal. And they began to look for the outside.To search for the external cause, we collected open information on the state of the Mayak companions, compiled a list of possible external influences, evaluated their consequences and chose those that are consistent with known facts. We got what external influence is - hydrazine leakage from one of the “Frigate” steering engines. More details about our study can be found in the article .Analysis of project results
So let's summarize. What did the “Mayak” project lead to, did it achieve its intended goal? Was he able to change the state of affairs in our space program? Did indifferent people interested in space exploration come to it?We do not know.
But we were able to make and launch our own satellite into orbit, proved in practice that now, in Russia, it is possible, proved that it is not necessary to live in sunny California and have billions of dollars in order to practice our own space projects.We hope that after “Mayak” the road to space for space lovers has become easier and more understandable. We hope that after Mayak there will be other, more complex and interesting amateur space projects that will take advantage of our experience and will not repeat our mistakes. We hope, because nothing more remains to us that the goal of “Beacon” will be achieved!In conclusion, a few links and thanks.The “Beacon” page on the “Your Sector of Space” community site.You can track the views of the space engineering community about our launch in general and “Mayak” in particular here , the astronomical public's opinion about “Mayak” can be found here .To everyone who supported us - thank you very much for your support, the project would not have taken place without your help! Everyone who criticized us - thank you very much for the constructive criticism, it allowed us to make the project better! Special thanks to those who believed in the two fundraising campaigns and to the partners who helped us!It seems to be all.
Now, with peace of mind, you can say that the “Mayak” project is completed!Chronology of the project “Mayak”
December 24, 2013. The emergence of the idea of the project “Mayak”.March 5, 2014. The first meeting of the project. Start of development.March 18, 2014. Formulated TK on the spacecraft.March 27, 2014. The project was named “Lighthouse”.July 25 - September 3, 2014. The first fundraising campaign. Collected 407 952 rubles.September 2014 - June 2015. Layout design for stratospheric testing.December 2014. Negotiations with the company “Sputnix” on the launch of “Mayak” on the “Dnieper”.June 13-14, 2015 Demonstration of the layout of the solar reflector at GEEK PICNIC in Moscow.June 27, 2015.Open protection project at Digital October.July 19, 2015 . Ground test layout for stratospheric testing. The transition to the mechanical scheme of the disclosure of the frame of the solar reflector.October 19, 2015. Stratospheric testing layout.January - February 2016. Development of design documentation.February 1 - March 10, 2016. Second fundraising campaign. Collected 1 993 146 rubles.March-May 2016. Production of parts for the flight "Mayak" and layout.May 30 - July 27, 2016. The assembly of the flight "Beacon" and layout.June 15, 2016. The first assembly of the “Beacon” and the layout has been completed.June 20, 2016.Thermal vacuum tests of the “Beacon” flight copy with disclosure of the reflector frame in vacuum were successfully carried out.June 25, 2016. A fitting and flight copy, and a layout in the layout of the transport-launch container of the company ECM. Both copies entered the container, but the spring force was not enough to push the copies out of the container. Both samples are sent for revision.July 27, 2016. The second assembly of the “Beacon” and the layout has been completed.July 29, 2016. Successful fitting of the flight copy and the layout to the layout of the transport and launch container of the ECM company was carried out .September 13, 2016. In NIIEM completed test vibrodynamic tests of the flight copy of “Mayak”.September 14, 2016. During the functional tests of “Mayak”, his refusal was revealed. The on-board electronics turned out to be without power; there was no voltage at the battery terminals.September 15, 2016.The flight copy was disassembled, more than half of the contact welding points of the conductors between the battery cells were destroyed. When analyzing the causes of destruction, it was revealed that the cells had too high mobility inside the battery pack and when excited at their resonant frequency, the conductors between the cells collapsed. An identical battery was assembled and a small shaker was created, on which resonant frequencies were determined and experimentally, in laboratory conditions, the mechanism of destruction of welding joints was confirmed. The method of preventing the destruction of welding (see below) was tested on the same vibrostand; the method showed its suitability. The resonant frequency leading to the destruction of welding points or battery failure could not be identified.The battery cells were checked individually at the battery analyzer stand (no deviations were detected), and when assembled they were bonded with adhesive bonding to each other, to the boards and to the case of the battery pack using vacuum-resistant epoxy glue VK-9, the conductors between the cells were replaced with more flexible ones and duplicated Thus, each cell of the battery had a 4-fold reservation of contact) and also filled with a layer of VK-9. Vibrodynamic tests of the assembled battery were successfully carried out on a small vibration table.Vibrodynamic tests of the assembled battery were successfully carried out on a small vibration table.Vibrodynamic tests of the assembled battery were successfully carried out on a small vibration table.September 18, 2016. Completed battery repair. The battery is charged. Flight copy assembled.September 19, 2016. Passed a successful fitting and flight copy, and the layout of the layout of the transport and launch container company ECM.September 22, 2016. A presentation of the Mayak satellite was held at the Moscow Polytechnic University .March 23, 2017. Conducted a battery charge check. The charge was more than 95% of the nominal capacity; no imbalance of the elements was detected.April 4, 2017. “Glavkosmos” announced that the launch will be July 14, 2017.May 10, 2017.Passed a successful fitting and flight copy, and the layout of the flight transport and launch container company ECM. The transport container with the flight copy and mockup is sealed and handed over to “Glavkosmos” for shipment to Baikonur.June 21, 2017. In the MIK of the site 31 of the Baikonur Cosmodrome, a successful integration of the Beacon flight copy into the ECM company flight-launch container was carried out. Conducted a battery charge check. The charge was more than 95% of the nominal capacity; no imbalance of the elements was detected. On the flight copy of the “Mayak”, located inside the transport and launch container of the ECM company, the control of the limit switches operation and the launch of the cyclogram of the onboard equipment operation was successfully carried out.July 14, 2017. Lighthouse in orbit!August 9, 2017. , .29 2017 . «» , one LEMUR 2 and one FLOCK 2K were in off-design orbits.In fact, one of the eight “Lemurs” LEMUR 2 ARTFISCHER was in orbit with an apogee of 477 km, in which there are 47 “Flocks”, although there should have been 48, and one of the “Flocks” probably did not turn on and was in orbit with apogee of about 605 km, where the remaining seven "Lemurs" are located. There are 47 FLOCK 2K satellites in the NORAD catalog, while there should have been 48. All 47 are in orbit with an apogee of about 477 km. There are 8 LEMUR 2 satellites in the NORAD catalog, with 7 satellites in orbit with an apogee of about 605 km, and 1 satellite in an orbit with an apogee of about 477 km. It looks as if one “Lemur” and one “Flock” are reversed.August 31, 2017. Quote from Lenta.ru. The head of the Glavkosmos launch programs, Vsevolod Kryuchkovsky, explained why several satellites, launched on July 14 by the Russian Soyuz-2.1a rocket, did not get in touch or ended up in an unplanned orbit. He told his version of what happened to the Space News publication . According to Kryuchkovsky, from all foreign customers, Glavkosmos received official confirmation of the successful separation of the satellites from the upper stage of the launch vehicle. The Roscosmos subsidiary also assured foreign partners that during the separation the rocket was operating normally.Otherwise, the head of the launch programs of Glavkosmos assesses the situation with the satellites of Russian developers. “This is their first experience in the development of Kubsat,” he said. “Maybe something happened on the development side, either with components, or with ground stations.”September 1, 2017. It turns out that when you run given up three more satellites Cicero GeoOptics American company and one Russian-Ecuadorian UTE-UESOR.September 8, 2017. Refused 2 apparatus of the American company Astro Digital.October 5, 2017.“Glavkosmos” returned the dimensional-mass layout of the “Mayak”. It was decided to modify the layout to the flight (identical to the running device) state and to test its strength under the action of loads from transportation and removal, while its battery is modified according to the technology of repair of the flight battery.November 8, 2017. The revision of the mass-produced “Mayak” mockup to the flight state has begun.November 12, 2017. Completion of the final mass layout of the “Beacon” to the flying state has been completed. The battery is made on the same technology as the flight copy, by the same staff on the same equipment.November 15, 2017. The testing of the “Mayak” model was started using the program of vibrodynamic testsused for admission to the Soyuz 2.1a launch vehicle.November 22, 2017. Successfully completed the test layout “Beacon”. There were no deviations in the work, all the systems after tests are working normally.November 28, 2017. The results of a study on the possible causes of the Mayak accident were published.December 21, 2017. The final report on the project “Mayak” has been published. The project is completed.The Mayak project team at different stages
Alexander Belskikh - the designer at the initial phase of the project,Alexander Mugla - the developer of the disclosure system,Alexander Panov - the PR manager for the second crowdfunding,Alexander Shaenko - the project manager,Alexey Eliseev - the heat exchange engineer,Andrey Bokhan - the designer of Yalini,Anna Lavrova - the specialist on PR and crowdfunding on the first crowdfunding,Anton Alexandrov - developer of the power supply system,Anton Nedogarok - ballistic,Vladimir Nargelenas - designer at the initial phase of the project,Vladislav Bucharsk iy - the designer at the initial phase of the project,Gleb Lubin - the developer of the disclosure system,Daria Burova - PR and crowdfunding specialist at the first crowdfunding,Daria Mugla - disclosure system developer,Denis Efremov - organizer of stratospheric tests, disclosure system developer,Dmitry Dimitrov - tester, developer of the solar reflector laying scheme,Elena Emelyanova - key organizer of the second round of fundraising.Ilya Tagunov - electronics developer,Maria Kuznetsova - tester, developer of a solar reflector installation scheme,Maria Troitskaya - a PR and crowdfunding specialist for the first Om crowdfunding,Mikhail Belokoskov - developer of a chemical reactor and opening system,Mikhail Lavrov - chief designer,— ,
— “”,
— ,
— , ,
— ,
— “”.