
For thousands of years, humanity has sought to heaven, wanting to become like birds. Many great minds, from Leonardo da Vinci to the Wright brothers, designed a wide variety of aircraft, some of which remained on paper, while others became the progenitors of modern airplanes and helicopters. Now flying for a person is not difficult - I bought a plane ticket and voila. Most of us do not even think about how this huge metal bird works that can transfer us from one continent to another. The truth between modern planes and real birds is not so much in common, but with autonomous robots being developed, the situation is slightly different. Many scientists are trying to create a robot bird, and in order for this initiative to be successful, it is necessary to understand not only how birds fly, but also how to land. Today we will meet with you a study in which graduates of Stanford University studied in detail the mechanism for planting a parrot named Gary and his relatives. How do birds land, how do they understand that they may or may not land on a given surface, and what is the kinematics of their limbs during landing? We will find answers to these and other questions in the report of researchers. Go.
Study basis
What is the difference between modern aircraft and birds in terms of landing? Boeing 777, for example, needs a runway with a minimum length of 2500 m, a helicopter needs a flat (preferably) surface, like copters. Birds, in turn, are not limited in the geometry of the planting canvas and can land on almost any surface (if we consider the birds as a whole, rather than a single species). If we talk about autonomous robots, then their capabilities in terms of landing are very limited. Some of them can successfully land on specially designed surfaces, but this can not be compared with an ordinary woodpecker, which can land on vertical, inclined, horizontal surfaces, as long as there are claws to cling to.
 It’s convenient for me (ant woodpecker / Melanerpes formicivorus).
It’s convenient for me (ant woodpecker / Melanerpes formicivorus).Researchers note that their predecessors have already carried out some studies that quantified the dynamics of the legs and wings of birds during planting. However, it remains unclear how this dynamics changes depending on the different types of surfaces that serve as the landing site. After all, not only the geometry of the landing area is important, but also the surface texture.
It is also curious that previous studies were not conducted on live birds; therefore, in practice, it was not possible to fully evaluate the capture power of paws and claws. That is why some questions remained unlit: how exactly the birds understand that the landing site is suitable; what is the dynamics of the limbs at the time of touching and grabbing; why for birds landing on a variety of surfaces is a trifling matter, etc.
In the work we are considering today, the researchers decided to test the mechanisms and dynamics of the landing of tree birds by observing Lesson's budgerigars (
Forpus coelestis ).
 Lesson's Budgie.
Lesson's Budgie.Subjects voluntarily landed on poles with various geometries and textures. There were 9 options: 3 "natural", 3 with a changed diameter and 3 with a changed texture.
"Natural" options are named so, because the perches were made of real twigs (19 mm in diameter) of three different trees:
- Californian oak - the surface is rough in different parts of one branch;
- ceiba is magnificent - the surface is relatively smooth, branches are soft;
- fragrant osmanthus - the surface is longitudinally rough, the branches are hard.
For experiments with a modified diameter of the pole, ordinary birch pins of different diameters were used as the material:
- 38 mm - too large a diameter for this type of parrot;
- 19 mm - the parrot can perform a partial grip (front and rear fingers do not touch);
- 6 mm - the parrot can perform a full grip (the front and rear fingers touch).
For experiments with different textures, a birch pole with a diameter of 19 mm was wrapped in three different materials:
- foam - soft and elastic texture;
- teflon - slippery texture;
- Sandpaper is a rough and rough texture.
The parrot is testing all 9 options for the landing site.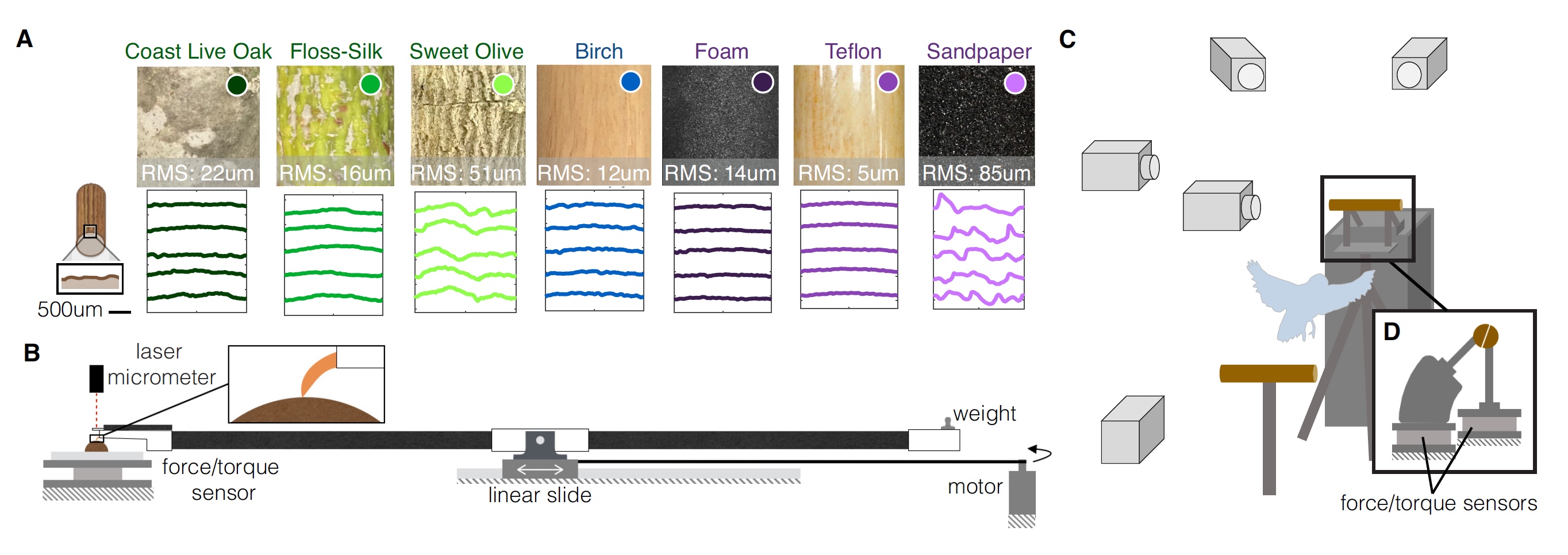 Image No. 1
Image No. 1A three-dimensional structural-light scanning of each of the perforation variants was carried out, which made it possible to quantitatively describe the surface texture of each of them and recreate surface profiles (
1A ). To evaluate the effect of these textural features on the interaction of the surface of the parrot’s perch and foot, the researchers conducted resistance tests of the fingers and claws to measure the friction forces for each surface. Claw pressure was also evaluated to measure surface deformation (
1B ).
In diagram
1C, we see that all tests were carried out under the gaze of several high-speed cameras, and the poles were sawn in half. Sensors of force and moment of force are attached to each half.
Research results
First of all, consider the dynamics of the wings and legs during landing.
In all tests with all variants of the landing surface, the subjects showed the same classic dynamics. Landing begins with wing braking (air phase), after which the paws absorb the remaining impulse in contact with the perch (absorption phase). Contact was made by both paws with a time delay between them of a few milliseconds, i.e. the first foot in contact with the pole is the preferred foot:
- Subject No. 1 — in 100% of cases, the right paw;
- Subject No. 2 — in 83% of cases, the left foot;
- Subject No. 3 — in 85% of cases, the left foot.
After contact, the fastening phase begins, when the budgie fixes fingers more securely and firmly around the perch. This is followed by a stage that is not always found, but often, is the adjustment phase, when they somehow change the position of the paws or fingers on the perch.
All phases of landing of a parrot (corresponds to the scheme on 2A ). Image No. 2
Image No. 2Sometimes parrots, apparently overestimating or underestimating the conditions of the test, slightly did not fly up / fly over the landing site (
2B ), which led to a greater dispersion of the angle of inclination of the foot, at which they establish a static grip.
It is curious that if there is some variation in the indicators of the strength of the legs (
2B ) and direction (
2C ), the average values of the landing force remain surprisingly the same for different poles.
The difference in indicators seen during the landing can be explained by the parrot landing strategy. There is a theory according to which birds control their landing by visually assessing the time of contact with the surface,
τ (
t ). For a successful landing, they adjust their approach speed to maintain a constant
τ (
t ). If a little more detailed:
τ is defined as the distance to the perch (
s ) divided by the approximation speed (
v ).
If the bird slows down with constant deceleration (
a ), then
τ =
s /
v = 0.5
at 2 /
at = 0.5
t , in which case
τ (
t ) = 0.5.
If
τ (
t ) <0.5, the inhibition will decrease until the moment of contact with the perch. And if 0.5 <
τ (
t ) <1, the braking will increase until the bird makes a controlled collision with the landing surface.
Given the kinematics described above, parrots maintain relatively constant values of
τ (
2E ) corresponding to values of controlled collisions (
2F ). The smallest mean value
τ = 0.80 was observed in tests with a pole with the smallest diameter (6 mm). And the highest value of
τ = 0.94 was in tests with a foam-covered pole. This suggests that parrots increase braking when approaching a soft landing surface.
The presence of a high value of
τ (i.e., greater than 0.5) in all tests with all types of surface indicates that the birds did not complete landing at the moment of touching.
Having got a little acquainted with the dynamics of landing, let us move on to the kinematics of the feet and claws of our feathered friends.
Given the uniformity of behavior during landing, regardless of the type of surface, the researchers concluded that birds react to differences in the texture and geometry of the landing pole precisely with their paws and claws, and not their wings. Sounds logical, doesn't it? But, surprise, this is not entirely true.
Kinematics of the foot showed a similar stereotypical (the same for all types of perches) set of landing stages (
3A ,
3B ).
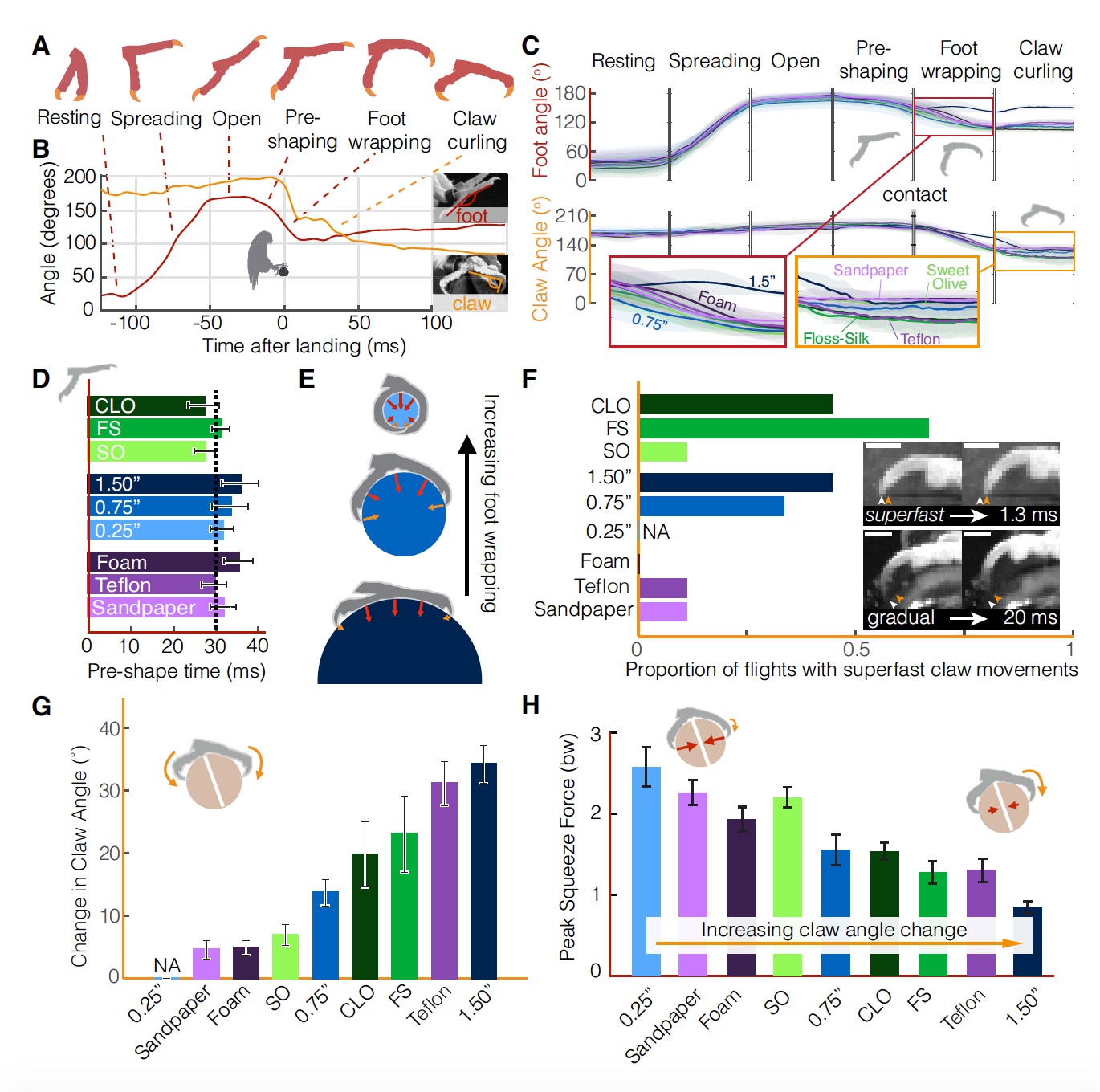 Image No. 3
Image No. 3During the flight, the feet are in a closed state (rest phase), then they begin to open about 100 ms before touching the perch (opening phase lasting 40 ± 8 ms), then there is an “open” phase, when within 21 ± 7 ms the stop fully disclosed.
Immediately before the contact, the fingers begin to approach each other (phase of the preliminary formation of the capture, duration 31 ± 10 ms). After establishing contact with the surface, the fingers begin to grasp the perch (phase of girth, duration 19 ± 7 ms). The final phase is claw capture lasting 185 ± 11 ms.
Differences in the texture and geometry of the pole affect only the kinematics of the landing stages after contact with the surface (
3C ). Until contact, the kinematics of the foot and claw remains unchanged in all tests, even when the feet begin to close during the pre-grip phase.
In other words, if the birds reacted to the difference in the geometry and texture of the landing surface, then kinematic changes would be observed even during the phases before contact, i.e. still in the air. Instead, the parrots sequentially begin the preliminary formation of the capture 30 ms before landing (
3D ). This leads to the assumption that they have predictable solutions to the problem of landing on an unusual surface.
It is important for the bird to maintain a large angle between the claws until the moment of contact in order to prevent their damage. Further, the degree of capture is determined by the diameter of the pole (
3E ). Full capture occurs in the case of poles with a diameter of 6 mm, i.e. parrots can fully use all their finger and claw strength to stabilize.
It is important to note that at the moment of contact, the claws and / or paws can slide off the poles, due to the smooth surface. As a result, the claw angle can vary. Taking into account that the claw capture stage can last more than 100 ms, individual movements of a single claw (
3F ) can occur incredibly quickly (1-2 ms).
Super-fast claw movements are probably not regulated solely by muscle contraction, researchers suggest. It is also surprising that among the vertebrates, the fastest muscle movements are 5-10 times slower than these superfast claw movements (for example, the human arm muscles - 50 ms, the hummingbird pectoral muscle - 8 ms). From this we can conclude that the speed of movement of the claw of a parrot depends on the release of energy stored in the elastic tendon, and on the low inertia of the claw. Such fast claw movements allow parrots to instantly adapt their grip depending on the geometry and texture of the landing surface.
As for the degree of claw capture, it depends on the diameter of the pole and on the texture (
3G ). The most pronounced grip is observed in the case of a diameter of 38 mm. It is worth clarifying that we are talking about the capture of claws, and not all of the legs entirely. That is, the larger the diameter, the more you need to rely on the claws, because the paws will not help (
3C ,
3E ). The claw angle relative to the surface is highly dependent on its texture. For example, in the case of smoother surfaces (Teflon), the claws “bend” more (
3H ) than in the case of a rough surface (sandpaper), since in this case they can simply compress the surface a little more, thereby ensuring reliable adhesion. Exaggeratedly speaking, the claws bend harder when the surface is harder to compress.
 Image No. 4
Image No. 4Then the researchers decided to check how, from the point of view of mechanics, the indicators of the compressive strength of the fingers and the bending of the claws change, and how they affect the adaptation of the bird to one or another surface during landing.
Tests with different textures of the poles showed that both the fingertips (
4A ) and the claws (
4C ) exhibit a similar
shear force * at the moments of sliding and gripping.
Shear force * - unequal forces pushing one part of the body in one particular direction, and the second part of the body in the opposite.
For paw pads, the most suitable method for representing the shear force as a function of normal force for all surfaces is the Coulomb friction model (
4B ), which allows one to predict the direction and magnitude of the friction force between two bodies in contact with dry surfaces (hence this model is also called the “dry friction model” )
For claws (
4C ), the coefficient of friction can be 8 times higher than that of the paw pads (
4A ). This difference can be caused, among other things, by the orientation of the claw relative to the surface (
4D ): on the softest surface, the friction force remains relatively constant, but on a rough surface, this force also increases with an increase in the claw angle. However, even at the same angles, measurements show that the maximum force coefficient for claws is still higher than for pads (
4E ).
To compensate for the stochastic nature of clutch adhesion, birds can take advantage of load balancing and claw movement on the surface. The load distribution between several claws effectively narrows the distribution of the expected total strength of all claws (
4E ). In addition, birds can extend their claws, which allows them to increase the likelihood of adhesion to an uneven surface, if any. This increases the expected value of the friction force (
4F ), which explains the more pronounced bending of the claws on surfaces that are more difficult to just compress firmly (
3F ). Stretching the claws gives an advantage in the case of surfaces on which there are few bumps, but they are quite large. However, this statement is slightly inconsistent with the observations, because the parrots did not very much seek to extend their claws, and this suggests that they do not choose the best bumps during planting. Therefore, they bend their claws as much as possible until sufficient strength is reached to maintain a stable grip. If during this process this force is not achieved, the bird will begin to adjust the position of the claws or take off.
 Image No. 5
Image No. 5The difference between the friction coefficients for claws and pads can also be explained by the geometry of these parts of the body and the geometry of the landing surface with which they are in contact. Pads have a larger area and soft texture, which allows you to distribute the load at many points of contact, and this leads to a more uniform friction force. The claws, in turn, are coarse and have a small area, therefore they rely on direct interaction with the geometry of the surface, i.e. on gearing for bumps.
To quantify the geometric effects, scientists characterized the shape of the claw in the sagittal plane in width as a function of height from the tip of the claw (
5A ). In addition to using existing surface irregularities, claws can also generate frictional forces from surface deformation.
To simulate this interaction, measurements of the claw penetration depth into various surfaces (
5B ) and claw geometry measurements were combined. The geometry of the claw tip was modeled by a sphere with a radius of 50 μm for loads up to 25% of body weight (
5C ). Thus, it was found that, for example, the penetration depth into the perch from California oak is 10 μm, i.e. 0.2% of the length of the external arc of the claw (approximately 5 mm).
In order to evaluate in more detail the effect of claw size on traction, another model was created with claws of different tip diameters clinging to different surfaces (
5D ). As expected, in the absence of any claw penetration into the surface, rougher surfaces are more suitable for successful capture (
5E ).
When surface penetration effects (
5F ) were added to the model, it was found that the useful surface was increased. Moreover, the more pronounced the effect, the smaller the angle formed between the vertical axis and the net force vector on the claw. If the radius and mass of the claw tip are scaled isometrically, and the applied forces depend on the mass, then the depth coefficient (penetration depth divided by the radius of the claw tip) will also scale isometrically.
From this we can make a logical conclusion that small irregularities on this surface are enough for small animals to effectively adhere to the surface.
 Image No. 6
Image No. 6By combining all of the above models for various effects, forces and other things, the researchers created a single two-dimensional model, which simultaneously takes into account the parameters of claws, paws and the body as a whole (
6A ).
The totality of data on the contact mechanics of the feet and the landing surface made it possible to apply limited optimization to determine the three-dimensional “capture space” of the bird and the necessary combination of force and moment of force (
6B ). It was found that not only the speed of the bird, but also the direction plays an important role in the success of the landing: if the speed vector of the bird is not directed to the center of the perch, then the bird can slip banally. The region of capture stability can be actively expanded by increasing the compression force or due to the surface texture itself, which represents more accessible surface friction (
6C ).
The smaller the branch, the greater the compression force. If the fingers of the bird completely cover the branch, then its stability will depend solely on the strength of the muscles. It turns out that thinner branches give birds more chances to successfully land on them. The only exception is flexibility: thin branches can bend under the weight of the bird, which means that the grip stability can be lost.
An assessment of all the fundamental forces involved in the process of landing a bird on a perch of different geometry and texture revealed the extreme importance of surface friction in the formation of a stable grip. However, it is worth noting that even in the case of sliding on the surface, this does not always happen arbitrarily. Slight glide at the moment of contact with the surface allows you to absorb energy during landing, to quickly detect irregularities with a high coefficient of friction.
For a more detailed acquaintance with the nuances of the study, I recommend that you look into the
report of scientists .
Epilogue
This work showed that not only flight is a complex process from the point of view of mechanics, aerodynamics and anatomy of birds. The landing process is also very difficult. It combines a number of physical forces that, in the right combination, allow the bird to land successfully and safely. Knowing this, according to the researchers themselves, a person will be able to create an autonomous flying robot that does not have to be caught at the time of landing or to prepare a landing site for him in advance. Birds conquered the sky much earlier than us, and we have something to learn from them. Someone may call this study a waste of man-hours, and someone - a great discovery. In any case, any new knowledge, be it about the quantum-classical transition or about the kinematics of the claws of a parrot during landing, is important. If we didn’t have a thirst for new knowledge, we would still be running around with the batons around the cave, exaggeratingly saying, of course.
Friday off-top:
Parrots not only fly perfectly (and land, as this study has shown), but also know how to have fun.
Thank you for your attention, stay curious and have a great weekend everyone, guys! :)
Thank you for staying with us. Do you like our articles? Want to see more interesting materials? Support us by placing an order or recommending it to your friends, a
30% discount for Habr users on a unique analogue of entry-level servers that we invented for you: The whole truth about VPS (KVM) E5-2650 v4 (6 Cores) 10GB DDR4 240GB SSD 1Gbps from $ 20 or how to divide the server? (options are available with RAID1 and RAID10, up to 24 cores and up to 40GB DDR4).
Dell R730xd 2 times cheaper? Only we have
2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV from $ 199 in the Netherlands! Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - from $ 99! Read about
How to Build Infrastructure Bldg. class c using Dell R730xd E5-2650 v4 servers costing 9,000 euros for a penny?