हेबर के सभी पाठकों को नमस्कार। इस विषय में, मैं आपको यह दिखाने की कोशिश करूंगा कि सामने वाले के आंदोलन के सरल भौतिकी को बनाने में कितना आसान है- और ऑल-व्हील ड्राइव कार।
तो चलिए!
प्रविष्टि
मुझे तुरंत यह कहना होगा कि मैं अभी तक भौतिकी की सभी अवधारणाओं से परिचित नहीं हूं, लेकिन मैं समझता हूं कि वे क्या हैं, इसलिए मुझे स्मार्ट शब्दों की उम्मीद नहीं है, मैं सबसे अधिक समझने योग्य और मानवीय भाषा में सब कुछ वर्णन करने का प्रयास करता हूं, मुझे अग्रिम में क्षमा करें।
इस लेख को लिखने के लिए प्रेरणा एक काम के एनालॉग की कमी है। उस क्षण जब मुझे ऐसा करने की आवश्यकता थी, मैंने केवल एक
या कम सामान्य उदाहरण को गुगलाया , जो दुर्भाग्य से, किसी कारण से मेरे लिए दिलचस्प नहीं था:
- बहाव / पर्ची की कुल कमी
- एक्स और वाई कुल्हाड़ियों के साथ चलते समय अलग-अलग गति (यह ज्ञात नहीं है कि इसका क्या कारण है, लेकिन मुझे इसकी आवश्यकता नहीं है)
ट्रेनिंग
तो हमें क्या पता। लेकिन हम जानते हैं कि जब एक कार पर (और पहियों पर हमारे मामले में) ड्राइविंग करते हैं, तो कुछ बल कार्य करते हैं। हमारी सरल परियोजना के लिए, स्वाभाविक रूप से, इनमें से कुछ ताकतों की उपेक्षा की जा सकती है (हम एक पूर्ण सिम्युलेटर नहीं कर रहे हैं)।
सभी पैरामीटर जो हम उपयोग करेंगे:
- कर्षण बल (यह यहाँ गति और त्वरण होगा)
- पहिए का अनुदैर्ध्य घर्षण
- पहिया घर्षण
इन सभी बलों को हम सीधे पहियों की वस्तुओं पर लागू करेंगे।
जब ग्राफिक रूप से आगे बढ़ते हैं, तो इन बलों का प्रतिनिधित्व निम्न प्रकार से किया जा सकता है (चित्रों में कार के सामने के लिए शीर्ष लें):
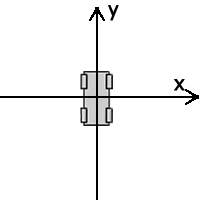
एक्स अक्ष - पहिया का अनुप्रस्थ घर्षण
Y अक्ष नीचे - पहिया का अनुदैर्ध्य घर्षण
Y अक्ष ऊपर - गति और त्वरण
उपरोक्त सभी कुल्हाड़ियाँ हमेशा प्रत्येक पहिया के केंद्र और उसके रोटेशन के कोण के सापेक्ष होती हैं।
एक कोड लिखना
एक भौतिक इंजन के रूप में, मैंने Box2D को चुना। कोड लिखना आसान बनाने के लिए, मैंने
क्विकबॉक्स 2 डी रैपर का उपयोग करने का निर्णय लिया, क्योंकि यह बॉक्स 2 डी में प्राइमेटीव बनाने में बहुत आसान बनाता है।
हम आवश्यक वर्गों को जोड़ते हैं :
import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;import Box2D. Collision . Shapes . * ; import Box2D. Common . Math . * ; import Box2D. Dynamics . * ; import Box2D. Dynamics . Joints . * ; import Box2D. Collision . * ; import Box2D. Common . * ; import com. actionsnippet . qbox . * ;
... और हमारी दुनिया बनाएँ:
var world:QuickBox2D = new QuickBox2D ( this , { debug: false , frim: true } ) ; world. gravity = new b2Vec2 ( 0 , 0 ) ; // world. start ( ) ; // world. createStageWalls ( ) ; // QuickBox'a - 4 stage world. mouseDrag ( ) ; //var world:QuickBox2D = new QuickBox2D ( this , { debug: false , frim: true } ) ; world. gravity = new b2Vec2 ( 0 , 0 ) ; // world. start ( ) ; // world. createStageWalls ( ) ; // QuickBox'a - 4 stage world. mouseDrag ( ) ; //var world:QuickBox2D = new QuickBox2D ( this , { debug: false , frim: true } ) ; world. gravity = new b2Vec2 ( 0 , 0 ) ; // world. start ( ) ; // world. createStageWalls ( ) ; // QuickBox'a - 4 stage world. mouseDrag ( ) ; //var world:QuickBox2D = new QuickBox2D ( this , { debug: false , frim: true } ) ; world. gravity = new b2Vec2 ( 0 , 0 ) ; // world. start ( ) ; // world. createStageWalls ( ) ; // QuickBox'a - 4 stage world. mouseDrag ( ) ; //var world:QuickBox2D = new QuickBox2D ( this , { debug: false , frim: true } ) ; world. gravity = new b2Vec2 ( 0 , 0 ) ; // world. start ( ) ; // world. createStageWalls ( ) ; // QuickBox'a - 4 stage world. mouseDrag ( ) ; //
हम आवश्यक चर या स्थिरांक लिखते हैं :
// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -// : private const FWD= 1 ; // private const AWD= 2 ; // private const RWD= 3 ; // private var _privod: Number ; // , private var _maxTurnAngle: Number ; // private var _width : Number ; // private var _height : Number ; // private var _axisOffset: Number ; // , private const _angularDamping = 7 ; // private const _angularDampingReverse = 3 ; // , private const _linearDamping = 0.25 ; // , - private const _linearDampingReverse = 0.5 ; // public var _carBody:QuickObject; // private var _frontAxisBodyLeft:QuickObject; // private var _frontAxisBodyRight:QuickObject; private var _rearAxisBodyLeft:QuickObject; private var _rearAxisBodyRight:QuickObject; private var _frontLeftJoint:QuickObject; // private var _frontRightJoint:QuickObject; private var _rearLeftJoint:QuickObject; // private var _rearRightJoint:QuickObject; protected var axisHeight: Number = 4 ; // protected var axisWidth: Number = 7 ; // public var drive: int = 0 ; // public var steer: int = 0 ; //drive = 1 - //drive = 0 - , //drive = -1 - // //steer = -1 - //steer = 0 - //steer = 1 -
हम पहियों के साथ एक कार बनाते हैं :
// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;// _width = 76 ; _height = 40 ; _maxTurnAngle = 15 * Globals. DEG_TO_RAD ; // _axisOffset: Number = ( _width / 4 - axisWidth ) / Globals. RATIO // _privod = FWD; // , _carBody = world. addBox ( { width : this . _width / 2 / Globals. RATIO , height : this . _height / 2 / Globals. RATIO , x : ( this . x + this . _width / 2 ) / Globals. RATIO , y : ( this . y + this . _height / 2 ) / Globals. RATIO , density: 0.48 , driction: 0.3 , restitution: 0.4 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true , skin: null , scaleSkin: true } ) ; this ._frontAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. body . GetWorldCenter ( ) . x + this ._axisOffset, y :_carBody. body . GetWorldCenter ( ) . y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 } ) ; this ._frontLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyLeft. body , x1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyLeft. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._frontRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._frontAxisBodyRight. body , x1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y1: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , x2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . x , y2: this ._frontAxisBodyRight. body . GetWorldCenter ( ) . y , enableLimit: true , enableMotor: true , collideConnected: true , lowerAngle:- this ._maxTurnAngle, upperAngle: this ._maxTurnAngle } ) ; this ._rearAxisBodyLeft = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y - this . _height / 4 / Globals. RATIO + 1 / Globals. RATIO , // + (this.axisHeight/2) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearAxisBodyRight = this . world . addBox ( { width : this . axisWidth / Globals. RATIO , height : ( this . axisHeight ) / Globals. RATIO , x :_carBody. x - this ._axisOffset, //-this.frontPivotOffset, y :_carBody. y + this . _height / 4 / Globals. RATIO - 1 / Globals. RATIO , // - (this.axisHeight) / Globals.RATIO, density: 0.48 , friction: 0.3 , restitution: 0.5 , linearDamping: this ._linearDamping, angularDamping: this ._angularDamping, groupIndex:- 1 , isSleeping: true } ) ; this ._rearLeftJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyLeft. body , x1: this ._rearAxisBodyLeft. x , y1: this ._rearAxisBodyLeft. y , x2: this ._rearAxisBodyLeft. x , y2: this ._rearAxisBodyLeft. y , enableLimit: true , enableMotor: false , collideConnected: false , lowerAngle: 0 , upperAngle: 0 } ) ; this ._rearRightJoint = this . world . addJoint ( { type :QuickBox2D. REVOLUTE , a: this ._carBody. body , b: this ._rearAxisBodyRight. body , x1: this ._rearAxisBodyRight. x , y1: this ._rearAxisBodyRight. y , x2: this ._rearAxisBodyRight. x , y2: this ._rearAxisBodyRight. y , enableLimit: true , enableMotor: false , lowerAngle: 0 , upperAngle: 0 } ) ;
खैर, हमने अपनी कार बनाई। इसकी उपस्थिति लगभग ऊपर की तस्वीर के समान है, लेकिन केवल इसे 90% दक्षिणावर्त घुमाया जाएगा।
अब हमारे पास मुख्य कार्य है: अपनी कार को चलाना सिखाने के लिए। ड्राइविंग प्रभाव को प्राप्त करने के लिए, हम
ApplyForce (..) को आवश्यक पहियों (फ्रंट-व्हील ड्राइव - फ्रंट व्हील के लिए
) को लागू करेंगे। पूर्ण-व्हील ड्राइव के लिए - सभी पहियों)
कारों की भौतिकी की गणना करने और उन्हें नियंत्रित करने के लिए, हम
गति का उपयोग करते हैं
() और हर बार दुनिया के अपडेट होने पर इसे कॉल करते हैं:
stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;stage . addEventListener ( KeyboardEvent. KEY_DOWN , keyDownList ) ; stage . addEventListener ( KeyboardEvent. KEY_UP , keyUpList ) ; world. addEventListener ( QuickBox2D. STEP ,onStep ) ; ... var bup: Boolean ; var bdown: Boolean ; var bleft: Boolean ; var bright: Boolean ; function keyDownList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = true ; } if ( e . keyCode == Keyboard. LEFT ) { bleft = true ; } if ( e . keyCode == Keyboard. DOWN ) { bdown = true ; } if ( e . keyCode == Keyboard. RIGHT ) { bright = true ; } } ; function keyUpList ( e :KeyboardEvent ) : void { if ( e . keyCode == Keyboard. UP ) { bup = false ; } ; if ( e . keyCode == Keyboard. LEFT ) { bleft = false ; } ; if ( e . keyCode == Keyboard. DOWN ) { bdown = false ; } ; if ( e . keyCode == Keyboard. RIGHT ) { bright = false ; } ; } ; function onStep ( evt:Event ) : void { car. accelerate ( ) ; if ( bup ) { car. drive = 1 } ; if ( bdown ) { car. drive =- 1 } ; if ( ! bup && ! bdown ) ( car. drive = 0 ) ; if ( bleft ) { car. steer =- 1 } ; if ( bright ) { car. steer = 1 } ; if ( ! bleft && ! bright ) { car. steer = 0 } ; } ;
ठीक है, वास्तव में
गति () प्रक्रिया ही (हम इसे लाइन द्वारा पंक्तिबद्ध करते हैं, पूर्ण प्रक्रिया कोड बाद में होगा):
1) सबसे पहले हम अपने शरीर को जगाते हैं
this ._carBody. body . WakeUp ( ) ; this ._frontAxisBodyLeft. body . WakeUp ( ) ; this ._frontAxisBodyRight. body . WakeUp ( ) ;this ._carBody. body . WakeUp ( ) ; this ._frontAxisBodyLeft. body . WakeUp ( ) ; this ._frontAxisBodyRight. body . WakeUp ( ) ;this ._carBody. body . WakeUp ( ) ; this ._frontAxisBodyLeft. body . WakeUp ( ) ; this ._frontAxisBodyRight. body . WakeUp ( ) ;
2) फिर हम आवश्यक घर्षण बलों को जोड़ते हैं (कुल, एक्स में, और वाई में) ताकि कार आगे बढ़े और एक तेज मोड़ के दौरान फिसल न जाए, और जड़ता से चलते समय यह धीमा हो जाता है:
if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;if ( this . drive > 0 ) { // this ._acceleration = this ._accelerationForward; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } else { // this ._acceleration = this ._accelerationBackwards; this . setLinearDamping ( this ._linearDamping ) ; this . setAngularDamping ( this ._angularDamping ) ; } this . addFriction ( this ._rearAxisBodyLeft. body , 0 ) ; this . addFriction ( this ._rearAxisBodyRight. body , 0 ) ; this . addFriction ( this ._frontAxisBodyLeft. body , 1 ) ; this . addFriction ( this ._frontAxisBodyRight. body , 1 ) ;
3) setLearearDamping () और
setAngularDamping ()private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }private function setLinearDamping ( linDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_linearDamping = linDamp; this ._frontAxisBodyRight. body . m_linearDamping = linDamp; this ._rearAxisBodyLeft. body . m_linearDamping = linDamp; this ._rearAxisBodyRight. body . m_linearDamping = linDamp; this ._carBody. body . m_linearDamping = linDamp; return ; } private function setAngularDamping ( angDamp: Number ) : void { this ._frontAxisBodyLeft. body . m_angularDamping = angDamp; this ._frontAxisBodyRight. body . m_angularDamping = angDamp; this ._rearAxisBodyLeft. body . m_angularDamping = angDamp; this ._rearAxisBodyRight. body . m_angularDamping = angDamp; this ._carBody. body . m_angularDamping = angDamp; return ; }
4) ठीक है, मेरी राय में, सबसे दिलचस्प
एडिक्शन () प्रक्रिया, जिस कार्यान्वयन के लिए मैंने खोज की और इतने लंबे समय तक मुझे नहीं मिला, और अब मैंने इसे स्वयं लागू किया:
- फ़ंक्शन जोड़ने का कार्य ( लक्ष्य: b2Body, isFront: संख्या )
- {
- var spd, spd2: b2Vec2;
- spd = targetBody। GetLinearVelocity ( ) ;
- spd2 = targetBody। GetLocalVector ( spd ) ;
- if ( यह ._privod == FWD ) { // फ्रंट-व्हील ड्राइव
- अगर ( isFront == 1 ) {
- spd2। y = spd2। y * 0.5 ;
- }
- और {
- spd2। y = spd2। y > 2.5 ? spd2। y * 0.45 : 0 ;
- }
- spd = targetBody। GetWorldVector ( spd2 ) ;
- targetBody। सेटलाइनियर वेलोसिटी ( spd ) ;
- }
- अगर ( यह ._privod == RWD ) {
- अगर ( isFront == 1 ) {
- spd2। y = 0 ;
- spd2। x = spd2। x * .9;
- spd = targetBody। GetWorldVector ( spd2 ) ;
- targetBody। सेटलाइनियर वेलोसिटी ( spd ) ;
- }
- और {
- spd2। y = spd2। y > 2.5 ? spd2। y * 0.25 : 0 ;
- spd = targetBody। GetWorldVector ( spd2 ) ;
- targetBody। सेटलाइनियर वेलोसिटी ( spd ) ;
- }
- }
- }
यह प्रक्रिया प्रत्येक पहिया के लिए वैश्विक वेग वेक्टर
spd2 को स्थानीय
spd2 में
घटाती है और X और Y के साथ घर्षण को लागू करती है। केवल एक चीज जो मेरे सिर में फिट नहीं होती है, कुल्हाड़ियों को 90% दक्षिणावर्त क्यों घुमाया जाता है? यही है, कार को फिसलने से बचाने के लिए और एक्स अक्ष के साथ घर्षण को जोड़ने के लिए जिसे मैंने अब ऊपर स्केच किया है हमें वाई अक्ष पर घर्षण जोड़ना है (यह पहिया का अनुप्रस्थ घर्षण भी है)।
5) हम तेजी को पूरक करना जारी रखते हैं
() , उन कोणों की गणना करें, जिन पर हम फिर गति और त्वरण की ताकतों को लागू करेंगे (सामने के पहियों के लिए):
- var carAngle: संख्या = यह ._कारबॉडी। शरीर । GetAngle ( ) ;
- अगर ( यह स्टीयर ! = 0 ) { // आगे गाड़ी चलाते समय
- this ._steerAngle = this ._steerAngle + यह । स्टीयर * इस ._steeringAcceleration;
- }
- अगर ( यह ।_steerAngle > carAngle + this ._steeringRange ) {
- this ._steerAngle = carAngle + this ._steeringRange;
- }
- और अगर ( यह। जल्दबाज़ी < carAngle - यह। जल्दबाज़ी ) {
- this ._steerAngle = carAngle - यह ._steeringRange;
- }
- अगर ( यह ड्राइव < 0 ) { // जब वापस ड्राइविंग
- यदि ( यह । स्टीयर == 0 ) {
- this ._steerAngle = carAngle;
- }
- और यदि ( यह । स्टीयर == - 1 ) {
- this ._steerAngle = carAngle - यह ._steeringRange;
- }
- और यदि ( यह । स्टीयर == 1 ) {
- this ._steerAngle = carAngle + this ._steeringRange;
- }
- }
- यदि ( यह । स्टीयर == 0 ) {
- this ._steerAngle = carAngle;
- }
6) सामने के पहियों को चालू करें:
- यह ._frontAxisBodyLeft। शरीर । SetXForm ( _frontAxisBodyLeft। बॉडी । GetXForm ( ) । स्थिति , यह ._steerAngle ) ;
- यह ._frontAxisBodyRight शरीर । सेटएक्सफ़ॉर्म ( _frontAxisBodyRight। शरीर । GetXForm ( ) । स्थिति , यह ._steerAngle ) ;
7) खैर, ड्राइव के आधार पर हम वांछित पहियों पर आवश्यक बलों को लागू करते हैं:
var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }var carspeedX, carspeedY, carRearX,carRearY: Number ; if ( this ._privod == FWD ) { // carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; } if ( this ._privod == AWD ) { carspeedX = this . drive * Math . cos ( this ._steerAngle ) * ( this ._acceleration ) ; carspeedY = this . drive * Math . sin ( this ._steerAngle ) * ( this ._acceleration ) ; carRearX = this . drive * Math . cos ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; carRearY = this . drive * Math . sin ( this ._rearAxisBodyRight. angle ) * ( this ._acceleration ) ; } if ( this . drive ! = 0 ) { if ( this ._privod == FWD ) { // , ( ) this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) // , ( ) { this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carRearX, carRearY ) ) ; } } else { // spd = this . speed ; if ( spd > this ._friction ) { spd = spd - this ._friction / 1.3 ; } else { spd = 0 ; } if ( this ._privod == FWD ) // , ( ) { carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } if ( this ._privod == AWD ) { // , ( ) carspeedX = Math . cos ( this ._steerAngle ) * spd; carspeedY = Math . sin ( this ._steerAngle ) * spd; this ._frontAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._frontAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; carspeedX = Math . cos ( this ._carBody. angle ) * spd; carspeedY = Math . sin ( this ._carBody. angle ) * spd; this ._rearAxisBodyLeft. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; this ._rearAxisBodyRight. body . SetLinearVelocity ( new b2Vec2 ( carspeedX, carspeedY ) ) ; } }
8) अंतिम स्पर्श:
- सार्वजनिक समारोह को गति मिलती है ( ) : नंबर {
- इसे वापस करें । शरीर । GetLinearVelocity ( ) । लंबाई ( ) ;
- }
कुल मिलाकर
परिणामस्वरूप, हमें कुछ ऐसा मिलता है:
डेमो swf narod.ru परMegaswf.com पर डेमो (अधिमानतः फुलस्क्रीन में)ps किसी कारण के लिए, मैं थोड़ा बाद में पूर्ण कोड पोस्ट करूँगा।