Arduino प्लेटफ़ॉर्म के बारे में कई दिलचस्प लेख हैं, जिन्हें आप
Ebay ऑनलाइन नीलामी में सुरक्षित रूप से ऑर्डर कर सकते हैं। इस मंच के लिए इंटरनेट पर कई मॉड्यूल और लेख हैं, इसलिए मैं कुछ दिलचस्प करना चाहता था, हालांकि रोजमर्रा की जिंदगी में हमेशा उपयोगी नहीं होता है।
काम के लिए, स्वतंत्रता के विभिन्न डिग्री के साथ प्लेटफार्मों का प्रबंधन करने का अनुभव है, इसलिए पहली चीज जो मैं करना चाहता था, वह
छह-डिग्री प्लेटफॉर्म (स्टीवर्ट प्लेटफॉर्म) था , लेकिन दुर्भाग्य से केवल चार सर्वो ड्राइव्स आए, इसलिए एक शुरुआत के लिए हम तीन-डिग्री प्लेटफॉर्म बनाएंगे।
उपकरण और सामग्री
इसलिए, इस इकाई का निर्माण करने के लिए, हमें निम्नलिखित घटकों की आवश्यकता है:
| मेजबान का नाम | संख्या |
| अरुडिनो मेगा | 1 पीसी |
| HXT900 सर्वो | 3 पीसी |
| प्लाईवुड | 1 पीसी |
| 5V वोल्टेज नियामक | 1 पीसी |
| पेपर क्लिप | 3 पीसी |
| तार धारक | 3 पीसी |
| USB कॉर्ड | 1 पीसी |
| बिजली की आपूर्ति | 1 पीसी |
| तारों को जोड़ना | 13 पीसी |
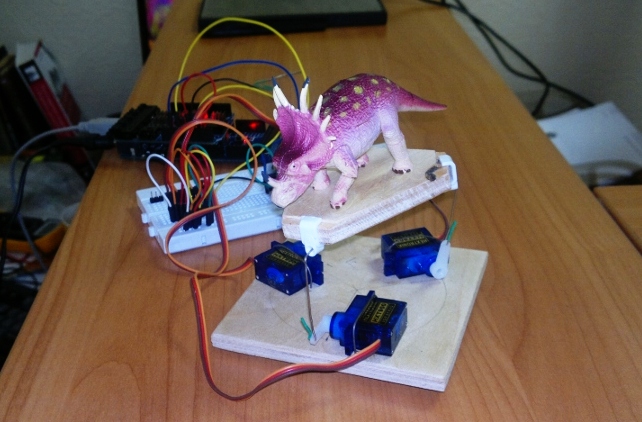
| Styracosaurus | 1 पीसी |
नीलामी में बोर्ड और कंट्रोलर Arduino Mega Kit की लागत $ 50 से है। चीन से सर्वो की खरीद के साथ, कोई समस्या नहीं होनी चाहिए, एक टुकड़े की लागत लगभग $ 2 है। प्लाईवुड देश में या स्टोर में पाया जा सकता है। काम में तीन पेपर क्लिप। सबसे कठिन बात एक स्टाइलकोर्सोस प्राप्त करना है, आमतौर पर जानवरों की ये प्रजातियां पोस्ट ऑफिस या बच्चों के स्टोर में देखी जा सकती हैं।
प्लेटफार्म निर्माण
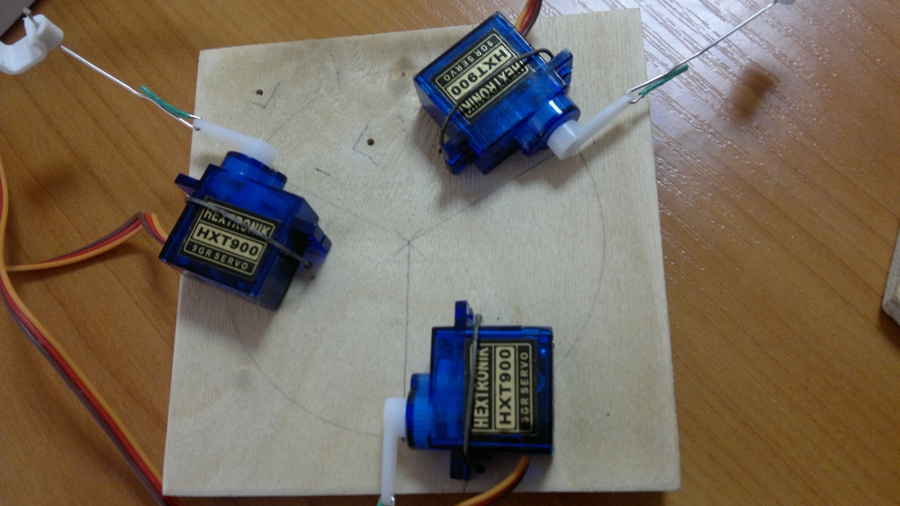
प्लेटफ़ॉर्म के निर्माण का मुख्य कार्य प्लेटफ़ॉर्म के आधार और प्लेटफ़ॉर्म से स्वयं प्लेटफ़ॉर्म को काटना है। नियंत्रण तत्वों को 120 डिग्री के कोण पर सर्कल के अंदर रखा गया है।
1 चरण - सेविंग
प्लेटफ़ॉर्म का आधार 10x10 सेमी आकार का है, साथ ही प्लेटफ़ॉर्म आकार में 8x8 सेमी है। प्लेटफ़ॉर्म को स्वयं वर्ग छोड़ा जा सकता है, लेकिन सुविधा के लिए एक त्रिकोण काट दिया गया था। समर्थन को बन्धन के स्थान पर देखा जाता है।
2 चरण - ड्रिलिंग
ड्रिलिंग के लिए, तीन भागों में विभाजित सर्कल को खींचना सबसे पहले आवश्यक है। 120 डिग्री से कम की किरणों में, सर्वो को लागू करना आवश्यक है, साथ ही ड्रिलिंग के लिए अंक भी अंकित करना आवश्यक है।
लगाव की विधि के आधार पर, समाप्त अंकन के अनुसार ड्रिल छेद। हार्नेस (सबसे अच्छा विकल्प) के साथ बन्धन के लिए, छेद 4 मिमी व्यास होना चाहिए। तार के साथ बन्धन के मामले में (जैसा कि मेरे मामले में), 2 मिमी के व्यास के साथ छेद पर्याप्त हैं।
3 चरण - एंकरेज तैयार करना
स्टेपल को छोड़कर बन्धन के लिए कुछ भी नहीं मिला (काम पर प्रदर्शन के बाद, एक और विकल्प प्रस्तावित किया गया था)। पेपर क्लिप को "जी" अक्षर के रूप में बनाया जाना चाहिए, जो सर्वो ड्राइव पर तय किया गया है और प्लेटफॉर्म प्लेटफॉर्म पर माउंट में डाला गया है।
काम के दौरान, मुझे स्टेपल के बजाय ट्रेक्स 450 हेलीकॉप्टर (पहले से चीन से ऑर्डर किया गया) से एक बॉल माउंट का उपयोग करने की पेशकश की गई थी। इस प्रकार के माउंट के साथ, मंच निर्माण में अधिक कठोर होगा।
चरण 4 - मंच बनाएँ
मंच का संयोजन निम्नलिखित अनुक्रम में किया जाता है:
- मंच के आधार में तार को फैलाना;
- आधार पर सर्वो का बढ़ना;
- प्लेटफॉर्म प्लेटफॉर्म पर तारों के लिए फास्टनरों की स्थापना;
- इमदादी पर "जी" पत्र के रूप में फास्टनरों की स्थापना।
परिणाम
परिणाम मंच का आधार है, जैसा कि नीचे दिए गए आंकड़े में दिखाया गया है। लीड का समय
1 घंटा है ।
सर्किट असेंबली
कनेक्ट करने के लिए, Arduino वेबसाइट पर आधिकारिक
दस्तावेज में वर्णित विधि मूल रूप से उपयोग की गई थी। कई सर्वो को जोड़ने पर, बिजली की आपूर्ति पर्याप्त नहीं है, इसलिए 5V वोल्टेज नियामक (
कनेक्शन का एक
विस्तृत विवरण ) के माध्यम से तीन ड्राइव को अलग से "पावर" करना उचित है।
Arduino के लिए तीन सर्वो को जोड़ने के मामले में, शक्ति अपर्याप्त होगी और सुरक्षा को ट्रिगर किया जाएगा। ब्रेडबोर्ड पर स्टेबलाइजर के माध्यम से तीन ड्राइव का कनेक्शन नीचे दिए गए चित्र में दिखाया गया है:
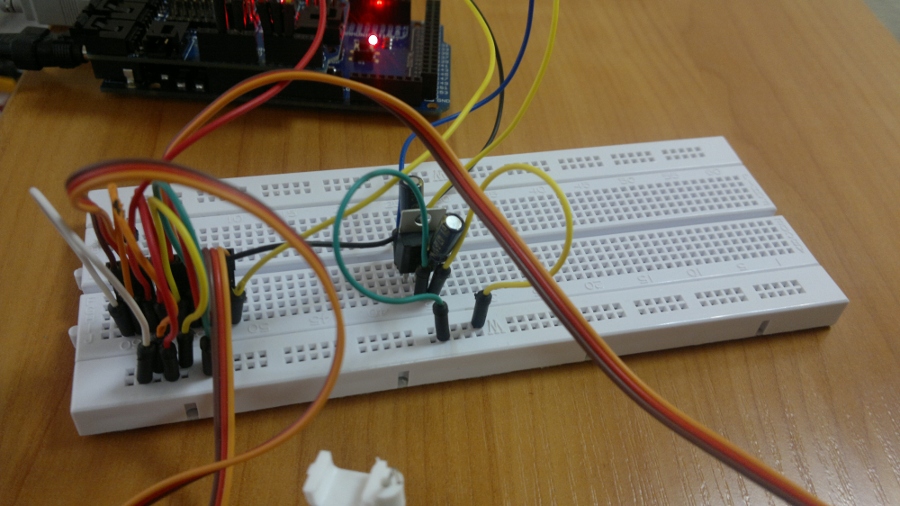
बोर्ड से 1, 2, 3 एनालॉग आउटपुट (एनालॉग पिंस) का उपयोग करके Arduino से नियंत्रण किया जाएगा। मेरे मामले में, बोर्ड से भी शक्ति जुड़ी हुई है। कनेक्शन का एक उदाहरण चित्र में दिखाया गया है:

जहां बाएं से दाएं: नीला - 5 वी, पीला - "जमीन", लाल - ड्राइव 1, काला - ड्राइव 2, पीला ड्राइव 3।
पूरे कनेक्शन आरेख का रूप है:

Arduino प्रोग्रामिंग
मंच को Arduino द्वारा प्रदान किए गए सीरियल पोर्ट के माध्यम से एक कंप्यूटर से नियंत्रित किया जाता है। पोर्ट के साथ काम Serial पुस्तकालय के माध्यम से किया जाता है, और SoftwareServo पुस्तकालय के माध्यम से सर्वो का नियंत्रण।
सीरियल पोर्ट से कमांड को पार्स करने के लिए, C में निम्न संरचना का उपयोग करें:
struct _set_pos_cmd_t
{
char cmd;
int pos1;
int pos2;
int pos3;
};
typedef _set_pos_cmd_t set_pos_cmd_t;
* This source code was highlighted with Source Code Highlighter .struct _set_pos_cmd_t
{
char cmd;
int pos1;
int pos2;
int pos3;
};
typedef _set_pos_cmd_t set_pos_cmd_t;
* This source code was highlighted with Source Code Highlighter .
तदनुसार, तीन पूर्णांक स्थिति इंगित की जाती है। कमांड बाइट भी इंगित किया गया है, हमारे मामले में, नियंत्रक को पदों को लिखने की कमान में कोड
0xC1 है ।
सर्वो की स्थिति को अपडेट_ एक्सपोजर फ़ंक्शन का उपयोग करके सेट किया गया है, जो कमांड से मानों को इमदादी शाफ्ट के रोटेशन के कोण के मानों में मैप करता है।
void update_positions()
{
int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM);
myservo1.write(val);
val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM);
myservo2.write(val);
val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM);
myservo3.write(val);
delay(5);
SoftwareServo::refresh();
}
* This source code was highlighted with Source Code Highlighter .void update_positions()
{
int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM);
myservo1.write(val);
val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM);
myservo2.write(val);
val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM);
myservo3.write(val);
delay(5);
SoftwareServo::refresh();
}
* This source code was highlighted with Source Code Highlighter .
Arduino के लिए अंतिम कार्यक्रम
#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .
#include <SoftwareServo.h> #define SET_CMD 0xC1 #define COMMAND_ERROR 0x01 #define FORMAT_ERROR 0x02 #define VALUE_MINIMUM 0 #define VALUE_MAXIMUM 4096 #define SERVO_MINIMUM 0 #define SERVO_MAXIMUM 90 SoftwareServo myservo1; SoftwareServo myservo2; SoftwareServo myservo3; int servo_position1 = 0; int servo_position2 = 0; int servo_position3 = 0; struct _set_pos_cmd_t { char cmd; int pos1; int pos2; int pos3; }; typedef _set_pos_cmd_t set_pos_cmd_t; void setup() { pinMode(13, OUTPUT); myservo1.attach(A0); myservo2.attach(A1); myservo3.attach(A2); Serial.begin(115200); } boolean readBytes( char *bytes, int count) { char data; for ( int counter = 0; counter < count; ++counter) { data = Serial.read(); bytes[counter] = data; } Serial.flush(); return true ; } void set_positions( char *data) { set_pos_cmd_t *command = (set_pos_cmd_t*)data; servo_position1 = command->pos1; servo_position2 = command->pos2; servo_position3 = command->pos3; } void update_positions() { int val = map(servo_position1, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo1.write(val); val = map(servo_position2, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo2.write(val); val = map(servo_position3, VALUE_MINIMUM, VALUE_MAXIMUM, SERVO_MINIMUM, SERVO_MAXIMUM); myservo3.write(val); delay(5); SoftwareServo::refresh(); } void loop() { int availableBytes = 0; char buffer[128]; if ((availableBytes = Serial.available()) > 0) { if (!readBytes(buffer, availableBytes)) { Serial.write(FORMAT_ERROR); } switch (buffer[0]) { case SET_CMD: set_positions(buffer); Serial.write(0xDA); break ; } } update_positions(); } * This source code was highlighted with Source Code Highlighter .
प्रबंधन कार्यक्रम
तीन-चरण प्लेटफार्म प्रबंधन कार्यक्रम C # में लिखा गया है, जिसके मूल रूप में एक सरलीकृत रूप था:

मंच प्रबंधन कार्यक्रम के नवीनतम संस्करण ने फार्म लिया:
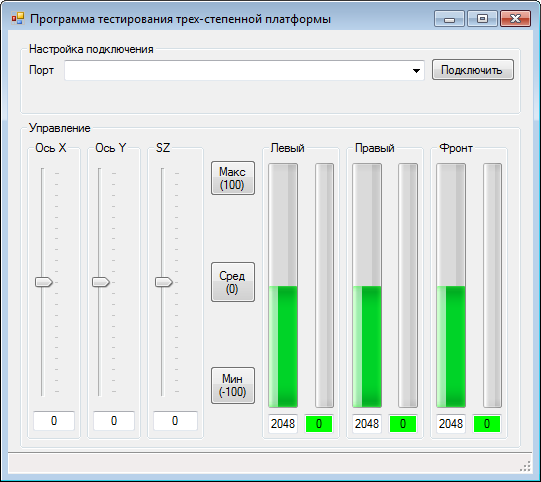 UPD: कंट्रोल क्लास सोर्स कोड
UPD: कंट्रोल क्लास सोर्स कोडकार्यान्वयन वीडियो
आपका ध्यान के लिए धन्यवाद!