सभी बेहतरीन, habrauserov। हां, मैंने एक रोबोट बनाया।
मैं इस पोस्ट को MSTU के नाम पर "भविष्य में कदम" के रूप में इस तरह की प्रवृत्ति को लोकप्रिय बनाने के लिए लिख रहा हूं एन.ई. बउमन, आखिरकार, हम सभी जानते हैं कि पर्याप्त स्कूली बच्चे हैं और वे हैं जो आधुनिक शिक्षा में रुचि रखते हैं।
"भविष्य में कदम" उच्च विद्यालय के छात्रों (10 और 11s), स्मार्ट, वैज्ञानिक गतिविधियों में संलग्न होने के लिए तैयार एक ओलंपियाड है।
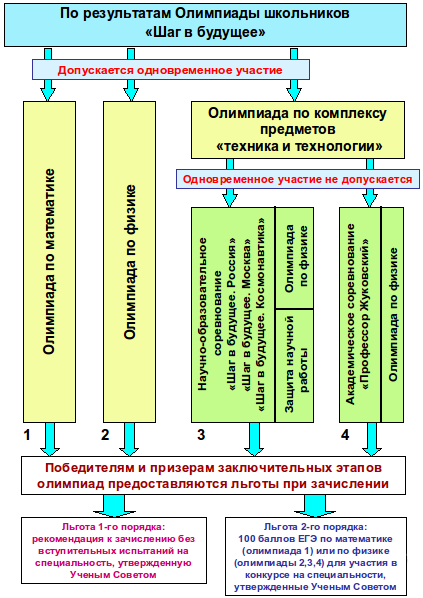
इसमें दो चरण होते हैं:
- आयोग के समक्ष परियोजना और उसके संरक्षण पर काम करना
- भौतिकी में ओलंपियाड लिखना
पहले भाग के परिणामों के आधार पर (यानी, आपको सुरक्षा के लिए कितने अंक प्राप्त होंगे), प्रतिभागी को दूसरे चरण तक या तो अनुमति दी जाती है, या बाहर फ़िल्टर किया जाता है।
यह एक छोटा विषयांतर था। अब मैं आपको बताता हूँ कि मैं सीधे सभी चरणों से कैसे गुज़रा।
शुरू करने के लिए, मैंने MSTU में Lyceum में अध्ययन किया। 2 साल के लिए एन.ई. बोमन। हां, उन्होंने हमारी मदद की, लेकिन उन्होंने केवल इस जानकारी के साथ मदद की कि ऐसा ओलंपियाड है और इसकी मदद से आप विश्वविद्यालय जा सकते हैं। मैं तब से प्रोग्रामिंग कर रहा हूं जब मैं 13 साल का था, और अब मैं सफलतापूर्वक एक कंपनी के लिए काम करता हूं।
सबसे पहले, मैं मुख्य शैक्षिक भवन के कक्ष 354 में गया। वहां उन्होंने यह जानकारी छोड़ दी कि मुझे इस तरह के और इस तरह के एक विभाग के लिए एक संकाय चाहिए। सब कुछ सरल है।
2 महीने के बाद, परियोजना का एक एनोटेशन प्रस्तुत करना आवश्यक था। इस बिंदु पर, प्रतिभागी को पहले से ही पर्यवेक्षक द्वारा संपर्क करना चाहिए था, जिसके साथ, वास्तव में, प्रतिभागी परियोजना में शामिल है (मैंने खुद सब कुछ किया था)। मैंने अपने वैज्ञानिक वैज्ञानिक को ईमेल द्वारा लिखा था, और अंत में मैंने परियोजना के विषय पर फैसला किया (हैबर के लिए धन्यवाद)। हम इस नतीजे पर पहुँचे कि मैं Arduino पर आधारित एक रोबोट बनाऊंगा, क्योंकि यह शांत और शानदार है।
इसलिए, मैंने पहले से ही
एबडिनो डैमिलानोव को eBay पर
ऑर्डर किया और इसे कई, कई वर्षों बाद रूसी पोस्ट के लिए धन्यवाद दिया। अच्छा सामान। मैंने एक प्रोग्राम लिखने की कोशिश की जो एलईडी को चालू / बंद करता है। अच्छा, मस्त। आगे क्या है?
तब मुझे बिल्कुल नहीं पता था कि इस बोर्ड के साथ आगे क्या करना है। EBay पर खोज करने पर, मुझे mr पहिए वाला प्लेटफ़ॉर्म मिला। मूल बातें।

हां, और मुझे यह मेल में अचानक प्राप्त हुआ। चीनी बेकार मंच। अंत में, सभी गियर खराब हो गए और वह खराब सवारी करने लगी। मुझे दूसरा आदेश देना था।

श्री मैंने लंबे समय तक मूल बातें जोड़ने की कोशिश की और ट्रांजिस्टर के माध्यम से आर्डूइनो के लिए हठ किया, क्योंकि मोटरों की आवाजाही के लिए बिल्कुल कोई वर्तमान नहीं था (मेरे वैज्ञानिक प्रशिक्षक ने मुझे इसके लिए धन्यवाद दिया, भले ही मुझे सर्किटरी थोड़ी समझ में आने लगी)। लेकिन सत्ता अभी भी पर्याप्त नहीं थी। तब मैंने arduino के लिए मोटर शील्ड को गॉगल किया, जिसके साथ आप सर्वो और मोटर्स को जोड़ सकते हैं। और इसके अलावा, Arduino IDE के लिए ढाल का अपना वर्ग है। इसने मेरी बहुत मदद की। कनेक्ट करना सरल है, कोड लिखना भी आसान है। अब मोटरें काम कर रही हैं।
मोटर्स को नियंत्रित करने के लिए आपको अपना खुद का सॉफ्टवेयर लिखना होगा। मैंने क्यूटी को चुना। एक साधारण कार्यक्रम लिखा गया था, जहाँ 4 तीर थे। कॉम-पोर्ट के माध्यम से डेटा ऐरे को बोर्ड में ही दबाने पर। सरणी में समाहित है: दायीं मोटर की दिशा, दायीं मोटर की गति, बायीं मोटर की दिशा, बायीं मोटर की गति।
सब कुछ तार के माध्यम से ठीक किया। अब मैंने रेडियो मॉड्यूल की तलाश शुरू कर दी। कुछ APC 220 मिला।

मैंने उन्हें ईबे पर ऑर्डर दिया। चीनी विक्रेता ने मुझे आश्वासन दिया कि मेरे लिए एक मॉड्यूल कंप्यूटर से आर्डिनो को नियंत्रित करने के लिए पर्याप्त था। मैं युवा और हरा था, लंबे समय तक टूट गया, लेकिन मुझे उनकी दृढ़ता पर विश्वास था। और, अचानक! यह आवश्यक था, ज़ाहिर है, दो मॉड्यूल। सामान्य तौर पर, मुझसे मुनाफा हुआ। उसने गलत तरीके से दूसरा मॉड्यूल भेजा (और मैंने इसे जला दिया), मुझे मॉस्को में देखना था।
एपीसी 220 को कनेक्ट करना बहुत मुश्किल है, कोई दस्तावेज नहीं है, मैंने इसे कनेक्ट करने के लिए सिर्फ एक सप्ताह तक संघर्ष किया।
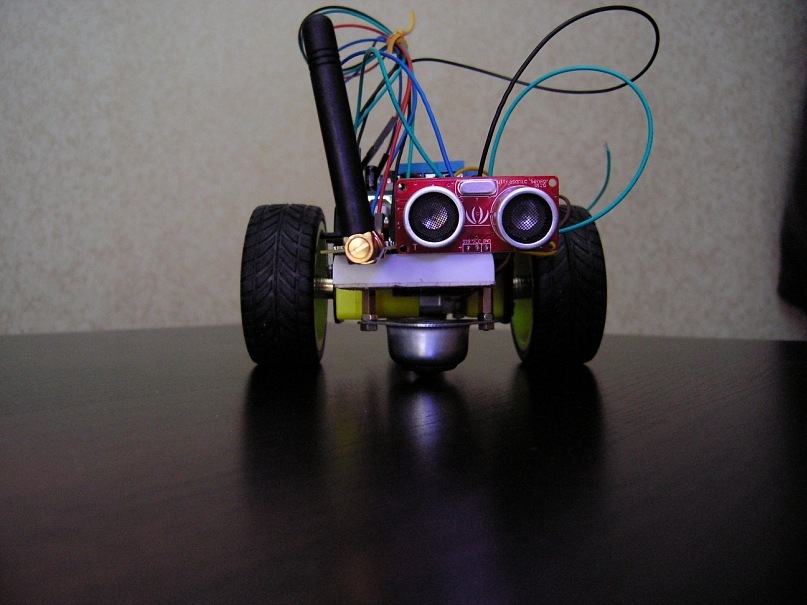
इसके अलावा, मैं पर्याप्त नहीं था, और मैंने एक अल्ट्रासोनिक रेंजफाइंडर को जोड़ने का फैसला किया:
- पहली बाधा के लिए दूरी निर्धारित करें
- स्वचालित रूप से इस बाधा के सामने रुकें, ताकि इस तरह के महंगे उपकरण को नुकसान न पहुंचे।

इस मॉड्यूल की जानकारी के लिए और आमतौर पर खुद इसके लिए Ilya Danilov (idanilov.ru) को धन्यवाद। उन्होंने मुझे सेटअप और कनेक्शन के साथ बहुत मदद की।
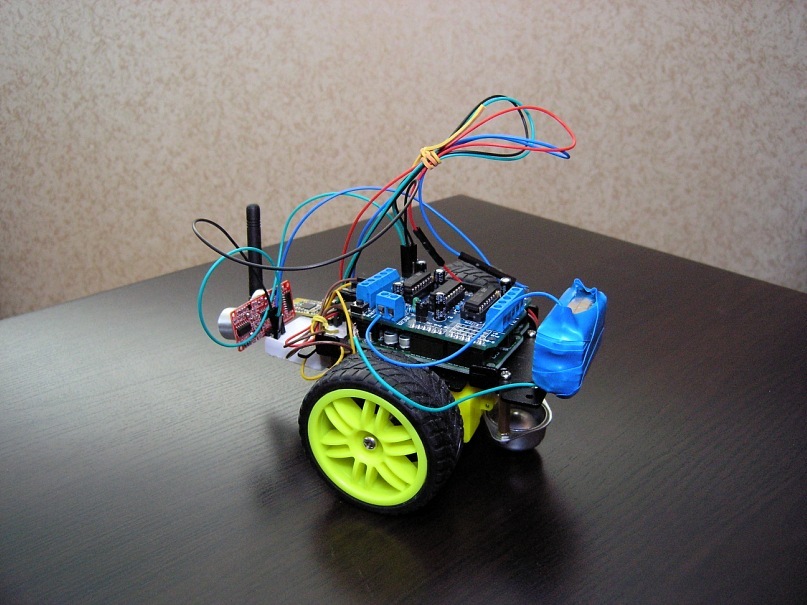
नतीजतन, हमें ऐसा रोबोट मिला, जिसे पीसी द्वारा रेडियो द्वारा नियंत्रित किया गया:
फरवरी में, रक्षा के लिए एक सार प्रस्तुत करना आवश्यक था, जिसने रोबोट के विकास के चरणों का वर्णन किया। यह पृष्ठ 20 निकला। उनकी समीक्षा की गई और उन्होंने स्कोर भी किया। मार्च में, रक्षा पहले से ही चल रही थी, जिसके परिणामस्वरूप उन्हें भौतिकी ओलंपियाड में भर्ती कराया गया था। मई में, ओलंपियाड के विजेता और पुरस्कार विजेता निर्धारित किए गए थे। इस वर्ष, MGTU को पुरस्कार और विजेता दोनों पुरस्कार मिले।
अब मैं पहले से ही सॉफ्टवेयर इंजीनियरिंग विभाग, MSTU का छात्र हूं। एन.ई.बौमन। आपका ध्यान देने के लिए धन्यवाद।