
अमेरिकी इंजीनियर रिचर्ड वार्डलो ने एक दिलचस्प
pyMCU माइक्रोकंट्रोलर विकसित किया है, जिसे वह "कंप्यूटर और भौतिक दुनिया के बीच एक सरल पायथन इंटरफ़ेस" के रूप में
रखता है।
मौजूदा पायथन माइक्रोकंट्रोलर्स के विपरीत, यह बोर्ड स्वायत्त काम के लिए इतना नहीं बनाया गया है जितना कि "संवेदी अंग" स्थायी रूप से पायथन प्रोग्राम के लिए कंप्यूटर से जुड़ा हुआ है। नियंत्रक डिजिटल और एनालॉग कनेक्टर से लैस है, ताकि आप इसे विभिन्न उपकरणों और सेंसर से कनेक्ट कर सकें। सबसे आसान तरीका है उदाहरणों का उपयोग करके नियंत्रक की क्षमताओं को दिखाना।
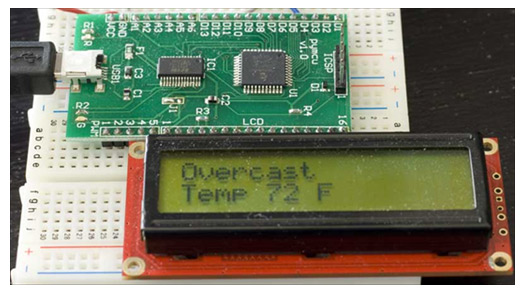
एलसीडी इंटरनेट से विभिन्न डेटा पर प्रदर्शित करें
आप किसी भी सरल डिस्प्ले का उपयोग कर सकते हैं जिससे तार जुड़े हुए हैं। इस मामले में, वर्तमान मौसम की स्थिति और तापमान के माध्यम से प्रदर्शित किया जाता है
पायथन-वेदर-एपीआई और
पाइवापी मॉड्यूल।
 कोड
कोडimport pymcu import time import pywapi mb = pymcu.mcuModule()
प्रकाश यंत्र से प्रकाश के अनुसार वास्तविक समय में एक ग्राफ का निर्माण
कोड import os,sys, subprocess, time, shutil, glob import pymcu import numpy as np import matplotlib matplotlib.use('GTKAgg')
कैमरा लेंस नियंत्रण
कोड import pymcu import time fstops = {0:'0',0x8:'1',0xB:'1.1',0xC:'1.2',0xD:'1.2',0x10:'1.4',0x13:'1.6', \ 0x14:'1.8',0x15:'1.8',0x18:'2',0x1B:'2.2',0x1C:'2.5',0x1D:'2.5',0x20:'2.8', \ 23:'3.2',0x24:'3.2',0x25:'3.5',0x28:'4',0x2B:'4.5',0x2C:'4.5',0x2D:'5', \ 0x30:'5.6',0x33:'6.3',0x34:'6.7',0x35:'7.1',0x38:'8',0x3B:'9',0x3C:'9.5', \ 0x3D:'10',0x40:'11',0x43:'13',0x44:'13',0x45:'14',0x48:'16',0x4B:'18', \ 0x4C:'19',0x4D:'20',0x4E:'20',0x4F:'20',0x50:'22',0x53:'25',0x54:'27', \ 0x55:'29',0x58:'32',0x5A:'32',0x5B:'36',0x5C:'38',0x5D:'40',0x60:'45', \ 0x63:'51',0x64:'54',0x65:'57',0x68:'64',0x6B:'72',0x6C:'76',0x6D:'80',0x70:'91'} mb = pymcu.mcuModule() mb.lcd() print "Enable SPI" mb.spiEnable(1,100,0,0)