शुभ दोपहर, प्रिय Khabrovites। मैं आपके सामने एक लेख प्रस्तुत करता हूं जिसमें मैं एक छह पैरों वाले रोबोट को पूरी तरह से खरोंच से डिजाइन और बनाने की प्रक्रिया का वर्णन करता हूं। आप यहाँ नहीं पाएंगे कि सब कुछ और 5 मिनट में "हेक्सापोड्स" के तैयार किए गए सेट से ऊब गए हैं। जानकारी की बड़ी मात्रा के कारण, लेख में कई भागों शामिल होंगे जो डिजाइन के विभिन्न चरणों का वर्णन करते हैं और उस रेक को रोशन करते हैं जिसे मैंने प्रक्रिया में आगे बढ़ाया था।
तो, मिलते हैं - एक्टोग्नथस।

कुछ समय के लिए मैंने एक रोबोट को इकट्ठा करने की योजना बनाई। अधिक सटीक होने के लिए, मैंने कई विकल्पों के बीच चयन किया - मैंने ट्रैक किए गए और चक्के वाले रोबोट को तुरंत ट्रैक किया, क्योंकि यह एक बहुत ही तुच्छ निर्णय है, और चुनाव मुख्य रूप से एक क्वाड्रोकॉप्टर और एक हेक्सापॉड के बीच था।
मैं हमेशा माइक्रो क्वाड्रोकॉप्टर्स के प्रति आकर्षित था, लेकिन जो बात मुझे हमेशा परेशान करती थी, वह यह थी कि उन्होंने बैटरी से बहुत कम समय के लिए उड़ान भरी थी। एक बार मुझे याद आया कि मेरे पास तीन माइक्रो-सर्वोस पड़े हुए थे, और एक दिन में मैंने इतना छोटा रोबोट इकट्ठा किया:
यह निश्चित रूप से निकला, अनाड़ी और खराब नियंत्रित - क्योंकि इसमें पूरे शरीर के लिए केवल तीन डिग्री की स्वतंत्रता थी, लेकिन किसी कारण से मुझे वास्तव में इसे प्रबंधित करने और इसके लिए सॉफ्टवेयर लिखने में बहुत मज़ा आया।
कुछ बड़ा इकट्ठा करने की मेरी इच्छा को याद करते हुए, मैंने अंततः एक पुलिस वाले के विचार को त्याग दिया और एक हेक्सापोड बनाने का फैसला किया। मैंने एक दोस्त को इस बारे में लिखा था, और उसने इस परियोजना में शामिल होने का फैसला किया।
विकास शुरू
प्रारंभ में, हमने पैर पर दो सर्वरों के साथ एक रोबोट को इकट्ठा करने की योजना बनाई। इससे कीमत कम हो जाती (12 सर्व बनाम 18!) और बिजली की खपत। इस तरह के निर्माणों में, एक सर्वो ड्राइव क्षैतिज विमान में पैर के रोटेशन को नियंत्रित करता है, दूसरा - इसका उठाने। पैर, जैसा कि तीन-सर्वर संस्करण में होता है, दो भाग होते हैं, लेकिन वे एक फ्रेम से जुड़े होते हैं, न कि एक अतिरिक्त सर्वो ड्राइव द्वारा। इस प्रकार, चरम स्थितियों में, पैर को "बढ़ा और शरीर पर दबाया जा सकता है" या "सतह पर उतारा और एक तरफ सेट किया जा सकता है", तीन-सर्वर संस्करण के विपरीत।
शुरू करने के लिए, मुझे पैर के डिजाइन का अनुमान लगाना था, जिसके लिए मैंने Google स्केचअप 3 डी का उपयोग करने का निर्णय लिया। इस बिंदु पर, मेरे पास अपने कंप्यूटर पर एक भी मशीन-बिल्डर स्थापित नहीं था, या 3 डी मॉडलिंग के लिए एक भी कार्यक्रम नहीं था, इसलिए मैंने एक मुफ्त डाउनलोड करने का फैसला किया, और, कई, सरल Google कार्यक्रम के अनुसार। अंतिम मॉडल की योजना बनाई गई थी, निश्चित रूप से, सॉलिडवर्क्स में करने के लिए।
आगे देखते हुए, मैं अपनी व्यक्तिपरक राय व्यक्त करूंगा। यहां तक कि इस तरह के त्वरित संगठनों के लिए, सॉलिडवर्क्स चुनें। जब मैंने इसे स्विच किया, तब मुझे महसूस हुआ कि यह किसी भी मामले में अधिक सुविधाजनक है। कम से कम सुविधाजनक बाइंडिंग, मॉडल पदानुक्रम आदि के कारण। इस बात का उल्लेख नहीं है कि आपको अपने 3 डी कार्यक्रम से ठोस काम करने के लिए दोहरा काम करने और मॉडल बनाने की ज़रूरत नहीं है। Google कार्यक्रम के केवल तीन फायदे हैं - मुफ्त, वजन (30 मीटर) और मॉडलों का एक विशाल भंडार जिसमें उपयोगकर्ता अपनी रचनाओं को अपलोड करते हैं, इसलिए, उदाहरण के लिए, सर्वो पहले से ही वहां था।
इसलिए, मैंने एक Google स्केच के साथ शुरुआत की और इस तरह के आकर्षक डिजाइन को आकर्षित किया:
फिर से विचार करने, फिर से विचार करने और विचार करने के बाद, वह पहली बार इस में बदल गई:
और फिर इस में:
सभी भागों को एल्यूमीनियम से मिलिंग के लिए डिज़ाइन किया गया था, इसलिए उन्हें या तो सपाट आकार देना था या झुकने के दौरान प्राप्त किया जाना था। बेशक, यह अभी भी सिर्फ एक स्केच था, और सबसे सफल संस्करण नहीं था, लेकिन इस पर विराम देने और सर्वो का चयन करने का निर्णय लिया गया था। मुख्य मानदंड ड्राइव के आकार और उनकी गति थे। मुख्य रूप से ई-बे मानक सर्वो ड्राइव और माइक्रोसर्विसेज प्रस्तुत किए जाते हैं। मानक सर्वो में मापदंडों और कीमतों की एक स्वस्थ श्रृंखला होती है, मैंने जो सबसे महंगा देखा है वह 300 रुपये का सर्वो इकाई है, जिसका क्षण लगभग 60 किलोग्राम * सेमी था।
सूक्ष्मजीवों में मुख्य रूप से 1-2 किग्रा * सेमी और लगभग 0.1 की गति थी। जब मैंने डिजाइन करना शुरू किया, तो मैंने
इस सर्वो को चुना, जिसकी गति उसी समय अन्य माइक्रोसर्विसेस की तुलना में लगभग दो गुना अधिक थी। लेकिन जब मैंने चित्र बनाने का अनुरोध किया, तो यह पता चला कि यह बिल्कुल भी सूक्ष्म नहीं था, लेकिन सूक्ष्म और मानक के बीच एक क्रॉस था, और अंत में मैंने उसी समान सर्वो को चुना, जिस पर मैंने अपना पहला तीन-सर्वर रोबोट,
MG90S बनाया , जिसकी लागत अतीत की तुलना में तीन गुना सस्ता।
इसके अलावा, दो बार ऑर्डर न करने के लिए, मैंने उसी स्टोर में रोबोट के लिए बैटरी चुनी। जब मैंने तीन-सर्वर रोबोट द्वारा खपत की जाने वाली धारा को मापा, तो मुझे ईमानदारी से आश्चर्य हुआ। मेरे अनुमान के अनुसार, इसे लगभग 300 mA का उपभोग करना चाहिए, वास्तव में, वर्तमान मूल्य 500 से 700 mA तक उछल गया, यानी 18 ड्राइव वाले एक हेक्सापॉड को छह गुना अधिक, लगभग 4.5A 6V शक्ति का उपभोग करना होगा। चूंकि करंट बड़ा नहीं था, इसलिए मैंने उचित आकार की कुछ लिथियम-पॉलीमर बैटरी लेने का फैसला किया। दुर्भाग्य से, लगभग सभी उच्च-क्षमता वाले लिथियम-पॉलीमर बैटरी बहुत लंबी थीं (8-12 सेमी!), जिसके कारण मुझे रोबोट के शरीर को मेरी अपेक्षा से अधिक बनाना होगा, लेकिन, सौभाग्य से, मुझे उनमें से एक मिला।
यह बैटरी न केवल लंबाई में छोटी थी, बल्कि बहुत संकीर्ण थी (कैलिपर ने 17 मिमी की मोटाई दिखाई थी)। 5V की अधिकतम खपत को 6V, यानी 30 वाट पर देखते हुए, मैंने रोबोट पर दो बैटरी लगाने का फैसला किया, जिसने 11.1V पर कुल 2.4AH दिया, यानी 26.64 Wh।
तो, अधिकतम खपत के साथ भी, रोबोट को उनसे 53 मिनट के लिए रहना चाहिए।
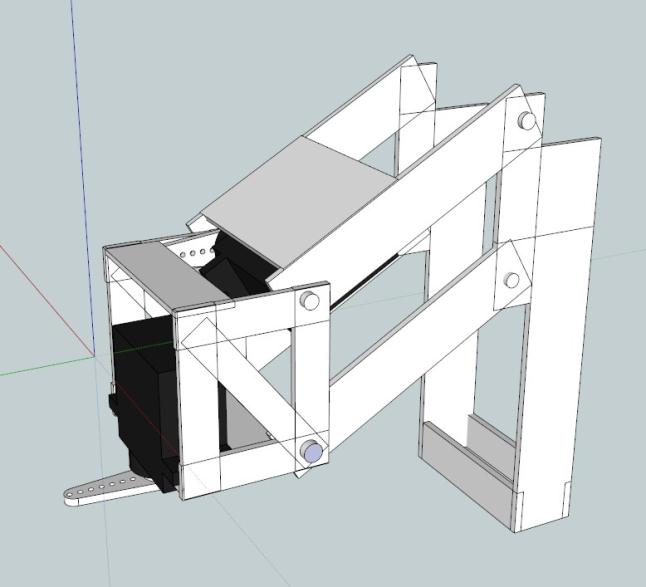
चूंकि सर्वो इतने सस्ते थे, इसलिए डिजाइन को बदलने और पैर पर तीन सर्वो के साथ एक रोबोट बनाने का निर्णय लिया गया। उसके बाद, Google स्केच में, मैंने रोबोट के डिज़ाइन का पता लगाया, और यहाँ क्या हुआ:
 एक रोबोट इसके विवरण से घिरा हुआ है।
एक रोबोट इसके विवरण से घिरा हुआ है।नतीजतन, मैंने ई-बे मैं 20 MG90S सर्वो, दो बैटरी और उनके लिए एक चार्जर का आदेश दिया। पूरे ऑर्डर की कीमत लगभग 200 रुपये थी। उसके बाद, मैंने आखिरकार ठोस और एक दोस्त स्थापित किया और मैंने वास्तविक डिजाइन शुरू किया।
डिज़ाइन
इस स्तर पर, हमने जिम्मेदारियों को साझा किया, एक दोस्त ने अपने पैरों के ठोस हिस्सों को खींचना शुरू किया, और मैंने सर्वो को माउंट करना शुरू कर दिया। दरअसल, यह संरचना के मुख्य घटकों में से एक था, जो पैर का पहला जोड़ था और शरीर से जुड़ा हुआ था, जो क्षैतिज और ऊर्ध्वाधर विमान में पैर के रोटेशन को अंजाम देता था। एक वास्तविक डिजाइन के नीचे चित्रित स्केच से स्थानांतरित करना आवश्यक था।
निम्नलिखित समस्याएं हुईं:
- MG90S, अधिकांश सर्वो की तरह, केवल एक तरफ एक अक्ष है। मैं उन्हें एक धुरी पर ठीक नहीं करना चाहता, क्योंकि इससे अवांछित विकृति पैदा हो सकती है।
- सर्वो के बढ़ते के लिए प्लास्टिक "कान" भी केवल शीर्ष पर स्थित हैं, इसलिए एक ब्रैकेट नहीं कर सका।
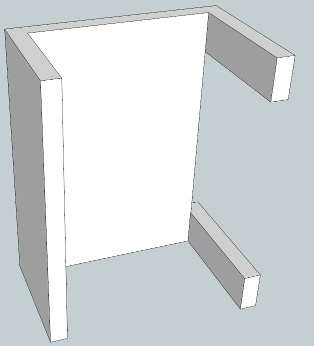
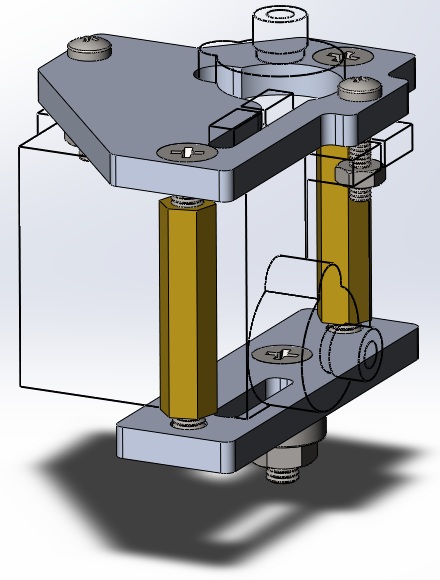
इसके आधार पर, दो सर्वोस के लिए पहले धारक के डिजाइन में काफी स्पष्ट समाधान हुआ, जो नीचे दिखाया गया है:
असेंबली में दो कोष्ठकों को एक साथ पेंचीदा किया गया था, जिसमें सर्वो को पेंच किया गया था।
सहायक माउंट करने के लिए इच्छित ब्रैकेट में, जो क्षैतिज विमान में घूमता है, इसकी धुरी के विपरीत एक छेद बनाया गया था, जिसमें इसे एक स्क्रू सम्मिलित करना था, जिसे अक्ष के विस्तार के रूप में काम करना चाहिए।
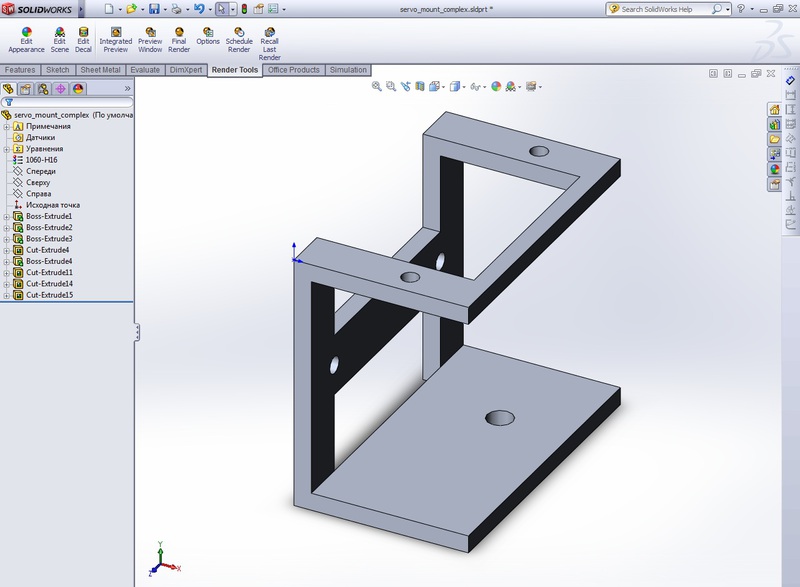
दोनों कोष्ठक शीट एल्यूमीनियम से मिलिंग और बाद में लचीले से प्राप्त किए गए थे। सॉलिड एक बहुत ही सुविधाजनक उपयोगिता प्रदान करता है जो आपको बिना किसी प्रयास के एक हिस्से का स्कैन प्राप्त करने की अनुमति देता है, कुछ ही क्लिक में - ऐसा करने के लिए, केवल उस भाग को उस रूप में ड्रा करें जिसमें आप इसे प्राप्त करना चाहते हैं:
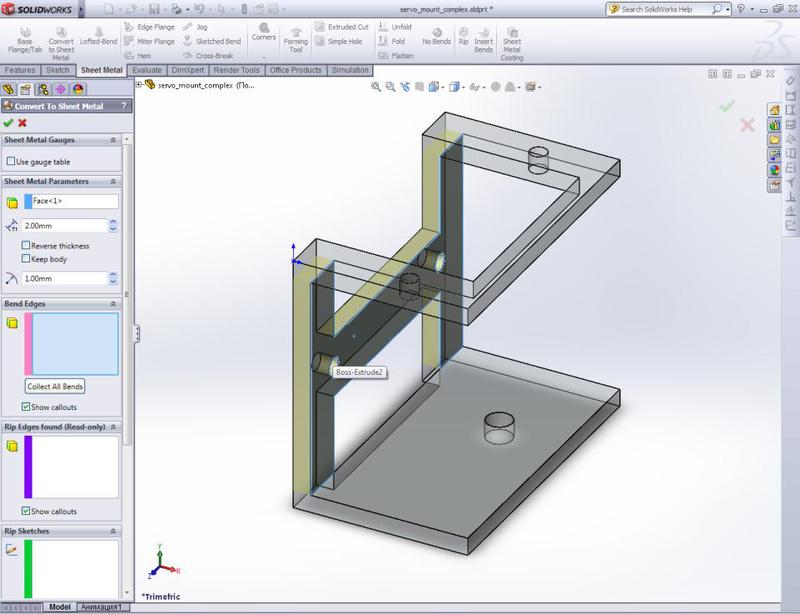
फिर मेनू में चयन करें - शीट मेटल - शीट मेटल में कनवर्ट करें, उस चेहरे को सम्मान के साथ निर्दिष्ट करें जिसके साथ हम झुकेंगे, शीट की मोटाई और झुकने की त्रिज्या:
ठीक क्लिक करने के बाद, हम अंतिम भाग प्राप्त करते हैं, अंतर नग्न आंखों को दिखाई देता है:
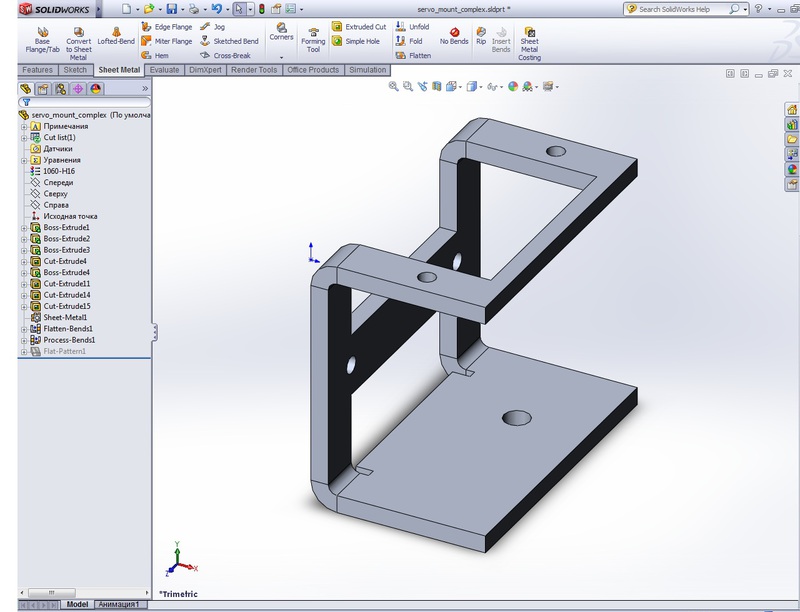
बाईं ओर के संचालन के पेड़ में, वास्तव में लचीला के अलावा, एक और है, निष्क्रिय - फ्लैट-पैटर्न। इसे सक्रिय करके, हम मिलिंग के लिए वांछित समोच्च प्राप्त करते हैं:
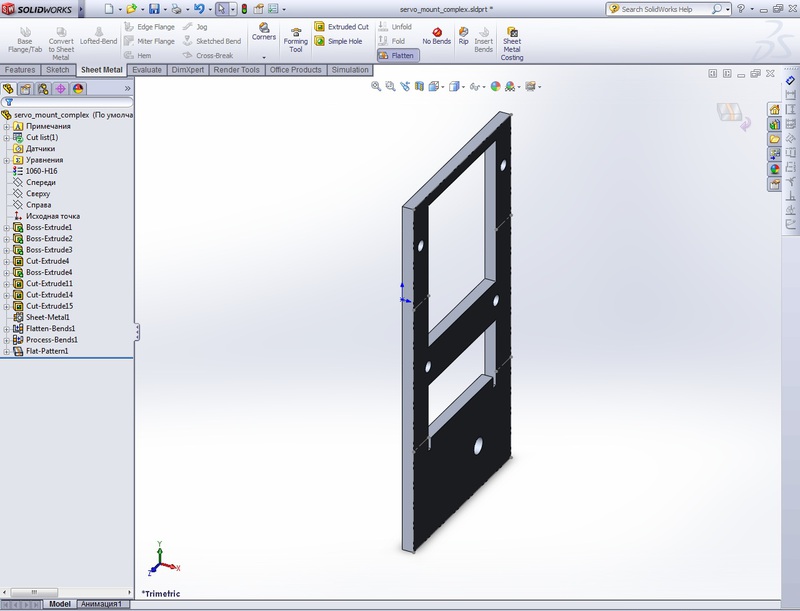
उसी समय, ठोस भाग में कटौती के बारे में भी परवाह करता है, यदि आवश्यक हो तो उन्हें जोड़ता है।
ड्राइव के लिए कोष्ठक के बाद, मैंने शरीर के एक अनुमानित दृश्य को स्केच किया, और एक दोस्त ने पैर के दो हिस्सों को फेंक दिया।
अंतिम रेंडर इस तरह निकला:
इस मॉडल ने आखिरकार रोबोट के द्रव्यमान को मापना संभव बना दिया। परिणाम इस प्रकार हैं:
13.5 ग्राम के 18 सर्व = 243 ग्राम, 250 ग्राम तक गोल।
75 ग्राम की दो बैटरी = 150 ग्राम
डिजाइन (शरीर में कटौती के बिना) शीट एल्यूमीनियम से बना 2 मिमी मोटी = 400 ग्राम।
इस प्रकार, रोबोट का कुल वजन 800 ग्राम था। इस मूल्य और सर्वो (2.2 किग्रा * सेमी) के सीमित समय के आधार पर, साथ ही साथ हेक्सापोड्स को समर्पित यूट्यूब पर विभिन्न वीडियो को देखने के लिए लंबे समय तक, पैरों की लंबाई का चयन किया गया था (ऊपर दिखाए गए मॉडल में उपयोग की जाने वाली लंबाई केवल अस्थायी रूप से ली गई थी) ।
नतीजतन, पैर का ऊर्ध्वाधर हिस्सा बनाने का फैसला किया गया था, "पिंडली," 110 मिमी, क्षैतिज, "जांघ" - 60 मिमी, जिसने 1: 2 के करीब अनुपात दिया, जो आमतौर पर हेक्सापोड्स में मनाया जाता है, और पल 6 * 0.8 = 4.8 किग्रा * है। सेमी। एक सर्वो, निश्चित रूप से इस तरह के वजन को उठाने में सक्षम नहीं है, लेकिन हमारे पास छह पैर हैं, जिनमें से तीन लगातार शरीर का समर्थन करते हैं, इसलिए प्रति सर्वो अंतिम क्षण 4.8 / 3 = 1.6 किलो * सेमी माना जा सकता है। वास्तव में, चूंकि दो ड्राइव पैर लिफ्ट में शामिल हैं, वास्तविक क्षण लगभग आधा है, यानी लगभग 600 ग्राम * सेमी। यदि वांछित है, तो नीलम का उपयोग करके सटीक मानों की गणना करना संभव था, भार के साथ मॉडल को पूरक करना, लेकिन मैंने अनुमानित मूल्य पर रहने का फैसला किया, क्योंकि ड्राइव ने इसे बहुत अधिक करने का वादा किया था।
मॉडल ने एक खामी का खुलासा किया - बैटरियों ने ड्राइव के रोटेशन को रोक दिया, अगर आप उन्हें रोबोट के अंदर रखते हैं, तो उन्हें छत पर स्थानांतरित करने का निर्णय लिया गया था।
इसके अलावा, मैं सर्वो के लिए धारकों के डिजाइन के बारे में चिंतित था - मैं बिल्कुल झुकने का आदेश नहीं देना चाहता था, और एक सप्ताहांत के साथ खर्च करने की अद्भुत संभावना थी, स्वीकार्य सटीकता के साथ मोटी एल्यूमीनियम शीट को मोड़ने की कोशिश कर रहा था।
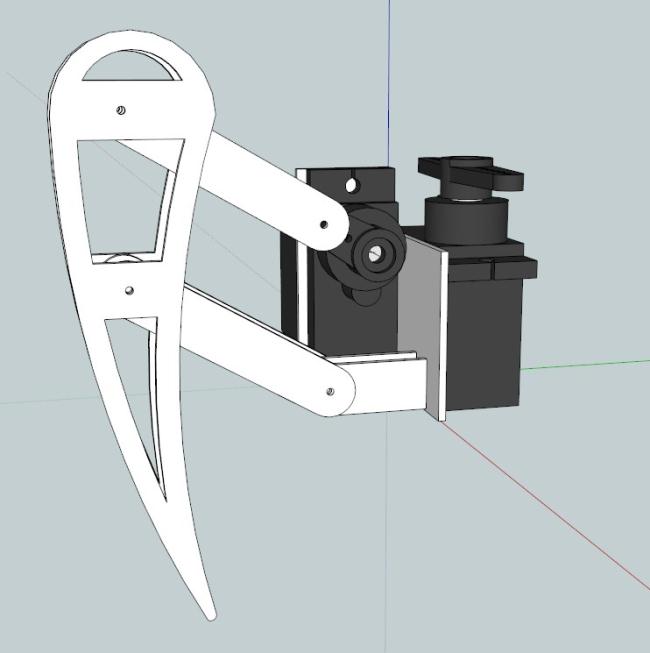
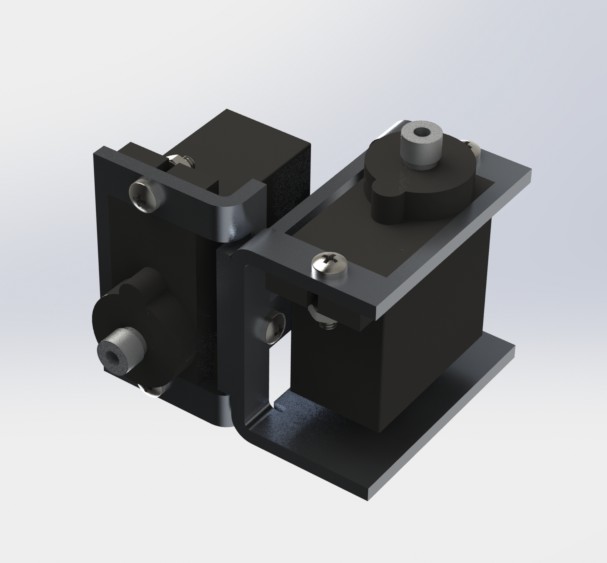
थोड़ी देर बैठने के बाद, मैंने धारकों को रेड कर दिया, और यह डिज़ाइन अंतिम था, जिसे एक वास्तविक रोबोट में बनाया गया था:
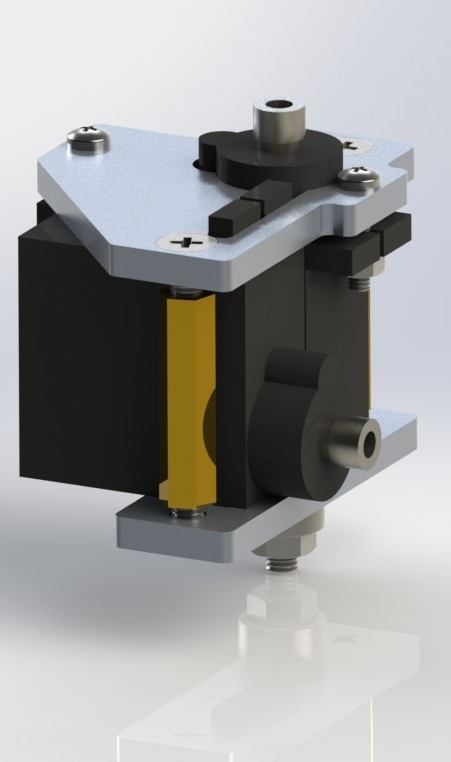
विधानसभा में सर्वो प्रोट्रूशंस के लिए स्लॉट्स के साथ दो पूरी तरह से सपाट हिस्से होते हैं और दो मानक रैक का उपयोग करके खराब कर दिया जाता है। एक धुरी के रूप में, पहले की तरह, एक पेंच है, जिसे हालांकि, छिपे हुए सिर के साथ एक स्क्रू के साथ बदलना पड़ा। अन्यथा, ड्राइव में से एक पेंच सिर के खिलाफ आराम करेगा।
पैरों को भी फिर से रंग दिया गया था, सबसे पहले, उनके हिस्सों की लंबाई को समायोजित किया गया था, और दूसरी बात, उनके आकार को अधिक सजावटी एक में बदल दिया गया था, ताकि बच्चों के डिजाइनर से स्पेयर पार्ट्स की छाप न दें:

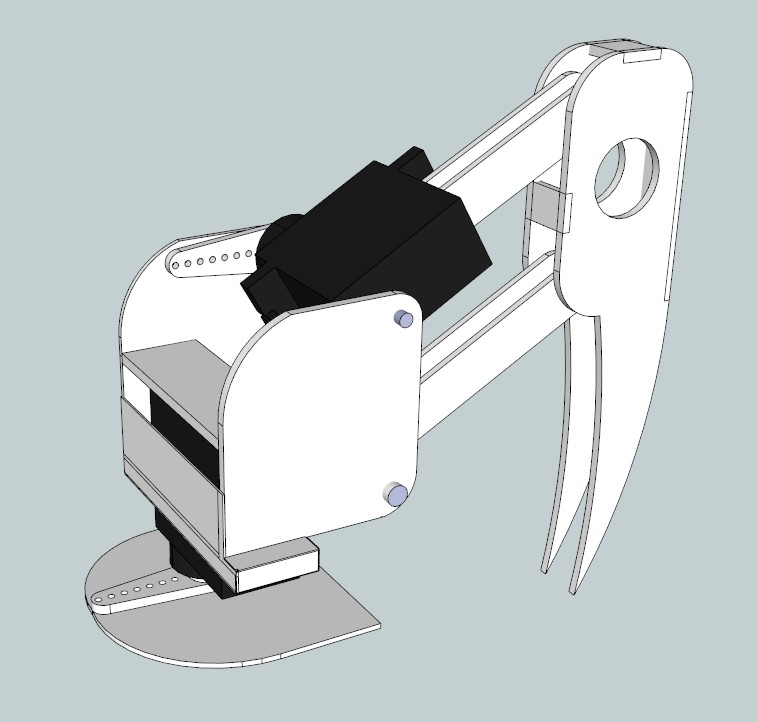
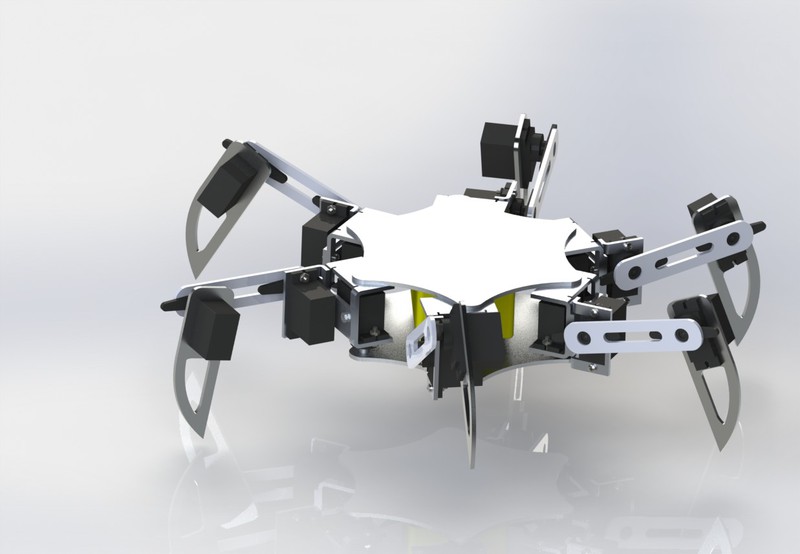
अंत में, सभी कार्यों का परिणाम एक नया रोबोट मॉडल था, जिसे मैंने आपके ध्यान में प्रस्तुत किया:
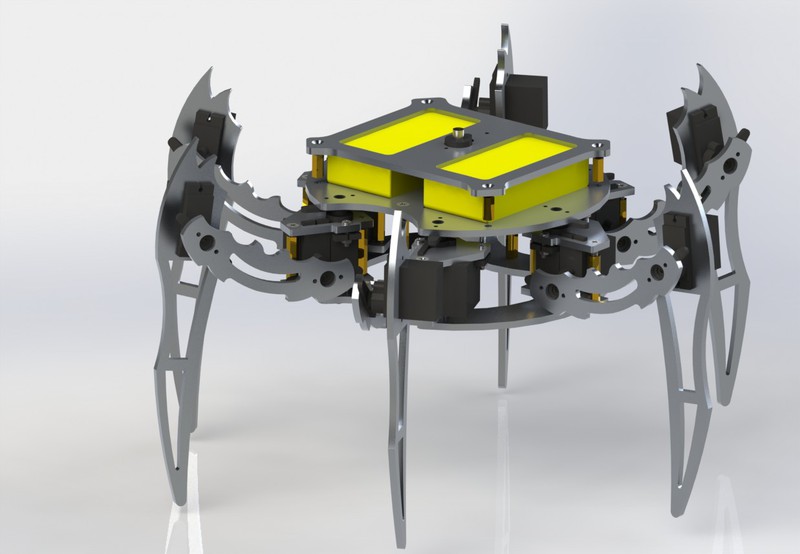
तब रोबोट को एक्टोग्नथस (कीट इक्टोग्नथा से, कीटों के नामों में से एक, जिसे हेक्सापोडा भी कहा जाता है, छः पैरों वाला) नाम मिला, जिसके लिए मैं अपने एक अन्य दोस्त को धन्यवाद देता हूं।
मॉडल पूरा होने के बाद, यह सॉलिडवर्क फ़ाइलों को मिलिंग में शामिल किसी भी कार्यालय में छोड़ने और वांछित विवरण प्राप्त करने के लिए पर्याप्त था। और चूंकि वे सभी अंतिम संस्करण में फ्लैट थे, इसलिए कोई अतिरिक्त संचालन की आवश्यकता नहीं थी और मिलिंग के तुरंत बाद संरचना को पेंच करना संभव था, पहले से शिकंजा, बीयरिंग, रैक और नट्स के साथ खरीदा गया था।
इस डिजाइन पर समाप्त हुआ और शुरू हुआ ...
उत्पादन
चूँकि यह लेख पहले ही स्पष्ट हो चुका है, इसलिए मॉडल से वास्तविक डिवाइस में संक्रमण और उससे जुड़ी समस्याओं और जाम (जिनमें से काफी कुछ थे!) के विवरण अगले
लेख में वर्णित हैं।
आपका ध्यान के लिए धन्यवाद!