
एक बार, मेरे एक फ़ोटोग्राफ़र दोस्त ने मुझे फोन किया और एक बहुत ही दिलचस्प सवाल पूछा: "क्या होगा अगर मैं रेडियो-नियंत्रित हेलीकॉप्टर पर कुछ फोटो सोप डिश लगाऊं और किसी तरह इस साबुन डिश को हवा से हटाने की कोशिश करूं?"
और, मुझे याद है, बचपन से मैंने रेडियो-नियंत्रित विमान के बारे में सपना देखा था, लेकिन मैं तथाकथित "आउटबैक" में रहता था, इसलिए मैं इस मामले में बच्चों के चित्र से आगे नहीं बढ़ पाया। इस बार मैं सीधे कुछ भी जवाब नहीं दे सकता, लेकिन जब से विषय ने अचानक मेरी दिलचस्पी ले ली (और जो इसमें रुचि नहीं होगी?), मैंने बाद में प्रश्न और फोन से निपटने का वादा किया।
मुद्दे के अध्ययन की शुरुआत से, मैंने पारंपरिक हेलिकॉप्टरों से क्वाड्रोकोप्टर, या बल्कि AR.D.Done पर स्विच किया, क्योंकि इसे प्रबंधित करना बहुत आसान है। लेकिन फिर यह पता चला कि विशेष रूप से AR.Drone पूरी तरह से कुछ हल्का उठा सकता है, और, तदनुसार, बहुत उच्च गुणवत्ता नहीं। हमने तब भी सोचा था कि एंड्रॉइड फोन के बारे में, जिसके लिए हम एक प्रोग्राम लिख सकते हैं और इसे दूसरे फोन से वाई-फाई के माध्यम से प्रबंधित कर सकते हैं।
आगे की खोजों ने मुझे DIY कॉपर्स के जंगल में ले जाया, जो कम से कम AR.Drone के समान परिमाण से सस्ता परिमाण का एक आदेश निकला, और एक छोटे से ओवरपेमेंट के साथ उन्होंने मुझे मिररलेस जैसे बहुत अधिक दिलचस्प चीजें जुटाने की अनुमति दी।
नतीजतन, इस सारे अध्ययन के कुछ महीनों के बाद, हमने XAircraft x650v8 को ऑर्डर करने का फैसला किया। वैसे, यह अजीब है कि तब हमने डीजेआई F550 + NAZA की दृष्टि खो दी, जो थोड़ा सस्ता है, और समीक्षाओं के मामले में बहुत अधिक स्थिर है।
लेकिन ऐसा हो कि जैसा कि x650 के साथ हमने लगभग एक वर्ष बिताया, अनुभव प्राप्त किया, धक्कों, विवरणों का एक समूह तोड़ दिया और, मुझे लगता है, मैं इसके बारे में बहुत कुछ बता सकता हूं।
आगे देखते हुए, मैं तुरंत आपको चेतावनी दूंगा: यदि आप हवा से उतारने की योजना बना रहे हैं, या यहां तक कि एक लोड के साथ अधिक या कम भारी कॉप्टर को नियंत्रित करते हैं, तो बस एफपीवी और टेलीमेट्री के बारे में पूरी तरह से सोचें। एक टन पैसा बचाएं क्योंकि इस विशेष क्षण में हवा में क्या हो रहा है इसका विवरण समझने से +100500 को नियंत्रणीयता मिलती है और तदनुसार, किसी भी विवरण को तोड़ने के बिना और आकाश से गिरने वाले यूएफओ के साथ दादी को डराने के बिना एक पागल पुलिस वाले को बचाने की अधिक संभावना होगी।
तो, XAircraft X650v8:
- 4 एक्सल पर 8 इंजन
- नेट वजन: 1260 ग्राम
- अधिकतम भार: 940 ग्राम (हमने कहीं और उठाया, कहीं 1200-1500 ग्राम)
- 25C 3300mAh पर उड़ान का समय - कैनन 1100d + कैनन 35 मिमी F2 के साथ लगभग 10 मिनट
- कीमत: ~ $ 750
मानक सेट में शामिल नहीं है: एक नियंत्रण कक्ष और इसके लिए एक रिसीवर, बैटरी और एक चार्जर, कैमरे के लिए एक माउंट, एक वैकल्पिक कम्पास और एक जीपीएस रिसीवर।
जब आपके पास पार्सल होगा, तो आपको फैशनेबल छोटे काले बक्से का एक गुच्छा और अंदर विवरण के साथ एक लाख बैग दिखाई देगा। सब कुछ बहुत करीने से पैक किया गया है। सभी बैग पर हस्ताक्षर हैं। बोल्ट की एक छोटी आपूर्ति है।

यहां दो सुझाव दिए गए हैं।
1. सभी बोल्टों को साधारण क्रॉस के साथ बदल दिया जाना चाहिए। सेट में हेक्स कीज़ शामिल हैं और मुझे एक भी ऐसी कुंजी नहीं मिली जो एक महीने के उपयोग के बाद मिट / टूट न जाए। वैसे भी, वे असहज हैं। आपको 2.5 मिमी और 3 मिमी बोल्ट की आवश्यकता है। स्टॉक में 50 के टुकड़े। सौभाग्य से, वे एक पैसा खर्च करते हैं। लेकिन 1.5 मिमी और 2 मिमी हेक्स कुंजी अभी भी उपयोगी हैं, जैसा कि बहुत विशेष बोल्ट हैं जो आपको दुकानों में मिलने की संभावना नहीं है, मैं उन्हें (चाबियां) एक बार में कम से कम दो टुकड़े खरीदने की सलाह देता हूं।
2. आप 4 कार्बन ट्यूबों को 10 मिमी के बाहरी व्यास से बदल सकते हैं। जो पैरों पर हैं वे मुख्य रूप से हैं यह बेवकूफ कार्बन रोल, बैसाखी के साथ टूटता और टूटता है और फिर भी किसी भी कारण से सबसे अप्रिय स्प्लिंटर्स को छोड़ देता है। किसी भी नलसाजी या ताला की दुकान में आप एक ही व्यास के साथ एल्यूमीनियम ट्यूब पा सकते हैं। ऐसी ट्यूब के 2 मीटर की लागत लगभग 30 रूबल है। वांछित लंबाई के टुकड़ों को देखा, और आपके कोप्टर को +1000 प्रभाव प्रतिरोध प्राप्त होता है, विशेष रूप से पैरों के क्षेत्र में, जिस पर यह भूमि है। एल्यूमीनियम ट्यूबों का वजन अधिक कार्बन नहीं है।
वैसे, हमने पैरों के सिरों पर फोम युक्तियों को भी संलग्न किया है (नीचे फोटो में वे सुंदरता के लिए काले टेप के साथ लिपटे हुए हैं) और इस तरह अनावश्यक जंपर्स के बिना कठोर सतहों पर बहुत नरम फिट मिला:

मैं उन कुल्हाड़ियों को भी बदलूंगा, जिन पर इंजन लटकते हैं (16 मिमी बाहर और 14 मिमी अंदर हैं), लेकिन मुझे ऐसे एल्यूमीनियम ट्यूब नहीं मिले। लेकिन eBay पर आप "कार्बन ट्यूब 14 16" अनुरोध पर ऐसे कार्बन पाइप पा सकते हैं, वे "आधिकारिक" स्पेयर पार्ट्स की तुलना में बहुत सस्ते हैं, जब तक कि उन्हें काटकर ड्रिल नहीं करना पड़ता।
सामान्य तौर पर, इस कोप्टर से मिलने के बाद, कार्बन का एक पागल अपमान मुझमें बढ़ गया।
इसलिए, सर्वव्यापी हेक्सागोन्स के अपवाद के साथ पहली धारणा, बहुत सकारात्मक थी। लेकिन फिर चीन ने अपना असली चेहरा दिखाना शुरू कर दिया।
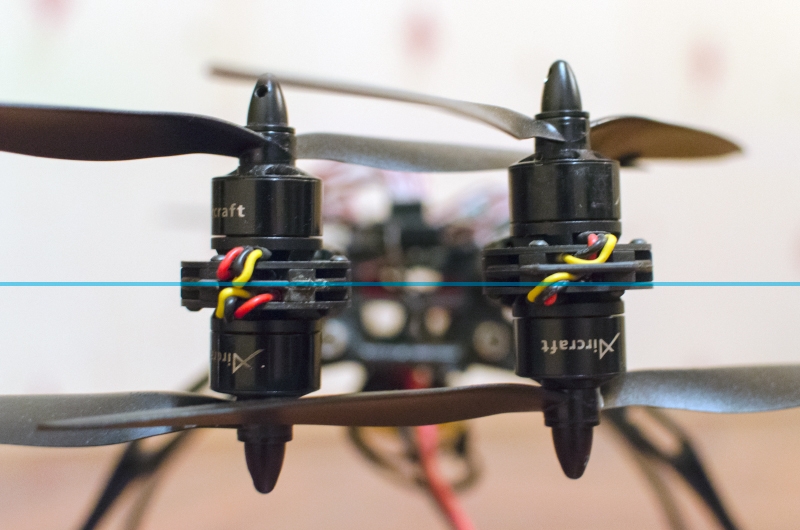
जिन अक्षों पर अज्ञात कारणों से इंजन लगे हैं, वे ठीक उसी विमान में स्थापित नहीं किए जा सकते हैं:
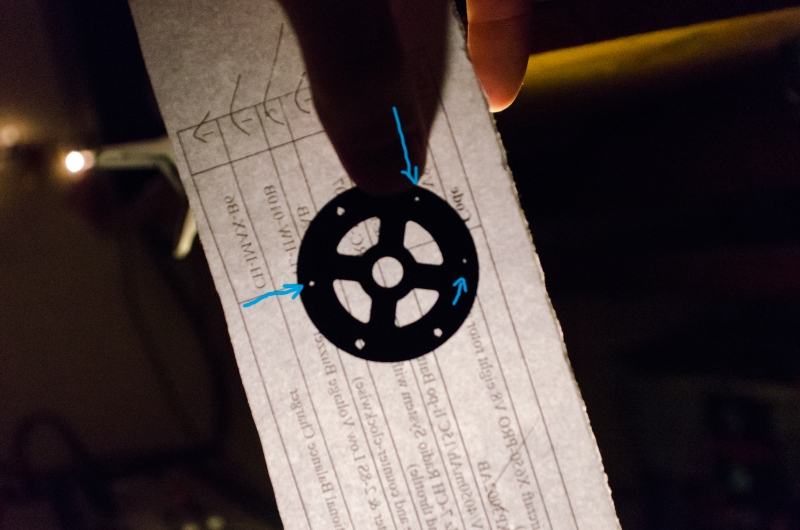
अंडर-ड्रिल किए गए छेद वाले हिस्से थे:
यह इंजन नियामक (ईएससी) धारकों पर सुरक्षात्मक कवर स्थापित करने के लिए काम नहीं करता था - सभी कुंडी सफलतापूर्वक टूट गई थीं, जिसके बाद हमने उन्हें काले बिजली के टेप के साथ बस हवा देने का फैसला किया:

आधिकारिक साइट ने काम नहीं किया (यह गर्मियों के बीच में काम किया), लेकिन, काफी मज़ेदार, अपडेट ने कार्यक्रम में ही काम किया। अच्छी तरह से और इतने पर।
निर्माण प्रक्रिया:

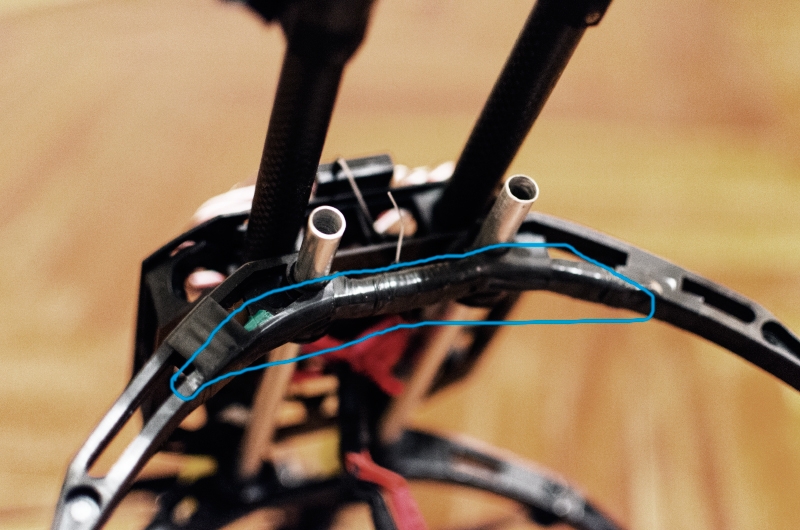
उसके बहुत नाजुक पैर भी हैं। जब हम उतरना और उतरना सीख रहे थे, हमने एक जोड़े को तोड़ दिया। प्रतिस्थापित करने वालों के लिए, इन स्थानों को तुरंत टिन स्ट्रिप्स के साथ मजबूत किया गया था:
तब से उन्हें बदला नहीं गया।
सौभाग्य से, यह सब इतना महत्वपूर्ण नहीं था जितना कि हमारे उत्साह को तोड़ने के लिए और हेलीकाप्टर शाम की एक जोड़ी में इकट्ठा किया गया था। लेकिन यहाँ हम फिर से विषमताओं पर ठोकर मारने लगे।
मुख्य विचित्रता जो मैं समझा नहीं सकता था वह एक क्षैतिज स्थिति रख रही थी। स्थिति इस प्रकार है:
- कॉप्टर जाइरोस्कोप को आत्मा के स्तर के साथ कैलिब्रेट किया जाता है।
- रिमोट कंट्रोल के जॉयस्टिक्स को कैलिब्रेट किया जाता है।
- विद्युत टेप के टुकड़ों का उपयोग करके शिकंजा को संतुलित करने के बारे में विभिन्न मंचों पर पाई गई युक्तियों का परीक्षण किया गया।
- अपने क्षितिज "हार्डवेयर" को बदलने के लिए पुलिस के "दिमाग" के तहत सभी प्रकार के टुकड़ों को लगाने के बारे में सुझावों का परीक्षण किया गया है।
इस सब के बावजूद, रिमोट कंट्रोल में आपको तथाकथित को कॉन्फ़िगर करना होगा ट्रिमिंग के बारे में 2-3% आगे, 20% दाईं ओर झुकाव और कभी-कभी (!) 30% मोड़ तक बाएं, यानी। ऐसा लगता है जैसे हम रिमोट कंट्रोल को हमेशा जॉयस्टिक की स्थिति को थोड़ा गैर-शून्य भेजने के लिए मजबूर कर रहे हैं। अन्यथा, कॉप्टर जगह पर खड़ा नहीं होगा। और फिर टेकऑफ के दौरान यह खत्म हो जाएगा। और जैसा कि मैंने कोशिश नहीं की, कम से कम कुछ सेकंड के लिए उसे हवा में (हवा के बिना) लटकाए, बिना जॉयस्टिक को छूने के - मैं सफल नहीं हुआ। मैं मानता हूं, मैंने कुछ गलत किया।
और फिर भी, कभी-कभी मैंने इसके पीछे एक अजीब गड़बड़ देखा: निष्क्रियता की एक लंबी अवधि के बाद, जब मैंने चालू करने के तुरंत बाद उतारने की कोशिश की, तो ऊपर वर्णित रिमोट कंट्रोल में ट्रिम के बावजूद भी कॉप्टर ने अपनी तरफ लुढ़कने की कोशिश की। इसने केवल "इसे बंद और फिर से चालू" करने में मदद की।
सामान्य तौर पर, बहुत कम से कम, लेकिन वसंत तक हमने थोड़ी उड़ान भरना शुरू कर दिया। जबकि कैमरों को नियंत्रित करने के लिए अतिरिक्त हिस्से हमारे पास आए, हमने सभी प्रकार के साबुन के व्यंजन और मिररलेस मिरर को इसमें झुका दिया, उन पर 20 सेकंड का समय निर्धारित किया, जल्दी से उड़ान भरी, इंतजार किया, उन्हें उतारा और ... देखा कि कुछ फिर से गलत था।
फिर हम अंत में Canon 1100d और पुराने Vivitar 19mm F3.8 FD वाइड-एंगल फिक्स पर टूट गए, जो पहली बार में बहुत अच्छा निकला। लेकिन फिर या तो कंपन ने इसे प्रभावित किया, या कुछ और, लेकिन तस्वीर पूरी तरह से साबुन बन गई और हमने कैनन 35 मिमी एफ 2 पर स्विच किया, जो स्टॉक में था।
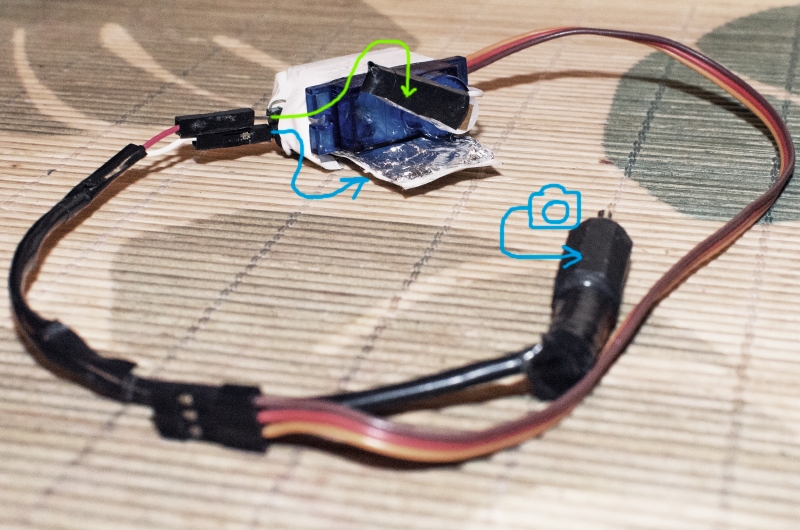
इस समय के आसपास, इमदादी ड्राइव हमारे पास आए और हमने, बिजली के टेप का उपयोग करते हुए, शटर बटन के ऊपर लगे कैमरे में से एक को सीधे घायल कर दिया:

ऐसा करने में विशेष रूप से मजेदार था, क्योंकि उस समय हम एक भीड़ भरी ट्रेन में वायबर्ग को गए थे। लेकिन डिजाइन आश्चर्यजनक रूप से विश्वसनीय था और हमने इसके तुरंत बाद से भाग लिया।
थोड़ी देर बाद,
ऐसी बात हमारे सामने आई:
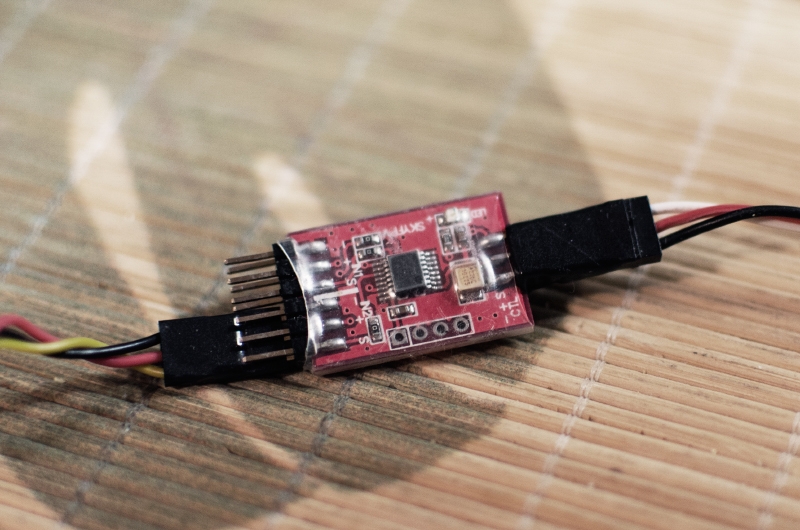
यह रिले सिग्नल को एक इनपुट से दो आउटपुट तक स्विच करने के लिए डिज़ाइन किया गया है। सामान्य तौर पर, इसका पासपोर्ट उद्देश्य FPV प्रणाली में कैमरों को बदलना है, लेकिन पहले हमने इसका इस्तेमाल कैमरे पर शटर रिलीज़ संपर्क को बंद करने के लिए किया था। फिर, जब उन्होंने फैसला किया कि एफपीवी के बिना सब कुछ अच्छा नहीं है, तो यह अपने इच्छित उद्देश्य को पूरा करता है, जिससे हमें दो अलग-अलग कैमरों से एक सिग्नल का चयन करने की अनुमति मिलती है, और पन्नी का उपयोग करके इस तरह के एक साधारण निर्माण में हाथ में आने वाली पहली ड्राइव बंद होने की भूमिका निभाने लगी:
यहाँ यह विषय से थोड़ा पीछे हटने और यह बताने के लायक है कि कैमरा नियंत्रण के संदर्भ में हमारा "इंजीनियरिंग" विचार कैसे चला गया।
प्रारंभ में, किसी कारण से, एफपीवी हमें बहुत जटिल और अनुचित रूप से महंगा लग रहा था (हालांकि जैसा कि बाद में पता चला (और एक से अधिक बार): दुस्साहसी दो बार भुगतान करता है)।
तो, Google ने तब हमें फोटोग्राफरों के लिए कुछ दिलचस्प समाधान दिए।
उनमें से एक
पिक्सेल एक्सपर्ट था। उन लोगों के लिए मुख्य आकर्षण जो वादा किया गया था, वे कैमरे के मैट्रिक्स से सीधे लाइव-व्यू मोड में छवि को देखने की क्षमता थे। यानी हम ठीक वही देखेंगे जो हम शूट करने वाले थे। योजना के अनुसार पासपोर्ट 200 मीटर हमारी आंखों के लिए पर्याप्त होगा और सामान्य तौर पर, अगर सब कुछ ठीक हो जाएगा ...
जैसा कि परीक्षणों के बाद यह पता चला, विश्वसनीय रिसेप्शन की सीमा दसियों मीटर से अधिक नहीं है, या इससे भी कम है। इसके अलावा, 1100d, निर्माता के दावों के बावजूद, लाइव-व्यू के मामले में असंगत निकला। तकनीकी सहायता के साथ संचार बहुत मज़ेदार और पागलपन से भरा था। सौभाग्य से, पिक्सेल ट्रांसमीटर पर एक एकीकृत कैमरा था, जिसका उपयोग हमने पहली बार किया था। लेकिन फिर बहुत कम दूरी पर। बीमा के लिए, एक सर्वो हर समय कैमरे पर लटका रहता था, जिसके साथ मैं शटर बटन दबा सकता था, कई बार जब पिक्सो ने संपर्क खो दिया था।
इस तरह से हमारे सहकर्मी ने बोर्ड पर पिक्सेल के साथ देखा:

यह तय करने के बाद कि यह किसी तरह पूरी तरह से दुखी है, हमने एक रिसीवर के साथ एफपीवी और एक अन्य नियंत्रण कक्ष के लिए लगभग पूर्ण सेट का आदेश दिया।
इस किट में शामिल हैं:
- 2 कैमरे (कुछ महीनों के बाद अपने दम पर मर गए)
- 200mw / 5.8GHz रिसीवर और ट्रांसमीटर (सैकड़ों मीटर तक आत्मविश्वास से काम करें)
- रिसीवर और ट्रांसमीटर के लिए बड़े एंटेना की एक जोड़ी (स्टॉक से भी बदतर हो गई)
एक रिसीवर के साथ एक अतिरिक्त नियंत्रण कक्ष की आवश्यकता थी ताकि फोटोग्राफर स्वयं कैमरे को नियंत्रित कर सके। भविष्य में, शटर बटन और एफपीवी कैमरा स्विच के अलावा, कैमरे के झुकाव निलंबन का नियंत्रण था, लेकिन हमने ठंड के मौसम की शुरुआत से पहले इसे करने का प्रबंधन नहीं किया, और एक तैयार किया गया सामान खरीदना बहुत महंगा था, कभी-कभी आधा कॉप्टर की तरह। यह पूरी तरह से स्पष्ट नहीं है कि क्यों।
हमने एक स्क्रीन और चश्मा का आदेश नहीं दिया, क्योंकि हमने एक यूएसबी वीडियो कैप्चर डिवाइस और एक मौजूदा पिक्सेल के साथ एक लैपटॉप का उपयोग करने का फैसला किया, जिसमें ट्रांसमीटर पर एनालॉग वीडियो इनपुट था।
इस मामले में, पिक्सेल के साथ, सब कुछ इस तरह से देखा गया:

लेकिन यहां तक, इस पिक्सेल ने हमें लगातार नीचे जाने दिया। तथ्य यह है कि रिमोट कंट्रोल 2.4GHz बैंड में भी काम करता है और किसी तरह यह पता चला है कि उनकी आवृत्तियों बहुत ज्यादा मेल खाती हैं - रिमोट कंट्रोल के बगल में, पिक्सेल रिसीवर ने अपने ट्रांसमीटर से संकेत उठाया, सबसे अच्छा, इससे दो मीटर दूर। लेकिन सामान्य तौर पर, शूट करना संभव था।
और यहाँ सब कुछ को छोड़कर है:

तस्वीर के बाईं ओर और कैमरे के हैंडल के दाईं ओर विद्युत टेप के साथ कवर किए गए कैमरे हैं।
प्रक्रिया के बारे में।
जैसा कि हमने कल्पना की थी:
- हम जगह पर पहुंचे
- सुंदर शूटिंग अंक चुनें
- हम कनेक्ट करते हैं, उतारते हैं, पिक्सेल में देखते हैं कि कैमरा क्या देखता है
- जैसे ही हम फ्रेम देखते हैं - जगह में फ्रीज, तस्वीरें लें
- हम नीचे उतरते हैं, चित्रों की जांच करते हैं
- यदि बैटरी रहती है, तो GOTO 2
हकीकत में कैसे देखा:
- आ गए
- एक ऐसी जगह मिली जहाँ आकाश पूरी तरह से तारों से लटका नहीं है
- विघटित
- पाया गया कि पिक्सेल रिसीवर ट्रांसमीटर को नहीं देखता है
- वह स्थिति मिली जिसमें पिक्सेल काम करता है
- कैमरा सेट करें (हमने मैनुअल मोड में शूट किया है)
- 10 मीटर की दूरी पर, पिक्सेल फिर से विफल होना शुरू हो गया
- मैं जगह में कोप्टर पकड़ता हूं, पिक्सेल के साथ कॉमरेड शमां
- पिक्सेल पराजित होता है, कॉमरेड कहता है कि कहां मोड़ना है और कितना अधिक बढ़ना है
- मैं निर्देशों का पालन करता हूं
- कॉमरेड कहते हैं: थोड़ा दाएं मुड़ें और फ्रीज करें, अब मैं शूटिंग करूंगा
- मैं दाईं ओर थोड़ा मुड़ता हूं, दिशा रखने की कोशिश करता हूं (यह ऊंचाई के साथ स्पष्ट नहीं है, मैं सिर्फ जॉयस्टिक को नहीं छूता हूं)
- कॉप्टर देखभाल नहीं करता है, यह या तो इसे दाईं ओर ले जाता है, फिर यह बाएं मुड़ता है
- मैं अपने कॉमरेड को सूचित करता हूं कि अवधारण के संदर्भ में मैं वह सब कुछ कर सकता हूं जो मैं कर सकता हूं
- वह पल को जब्त करने और उतारने की कोशिश करता है
- हवा या कोप्टर को नियंत्रित करने का प्रयास करते हुए, लगभग पांच मिनट तक हवा में बाहर रहें
- नीचे उतरो
- हम चित्रों को देखते हैं, आधे क्षितिज में लगभग ऊर्ध्वाधर है
- गोटो 7
- दूसरी बार, तस्वीरें बेहतर लगती हैं
- जा रहे हैं
- यदि बैटरी रहती है, तो GOTO 2
यहां यह ध्यान देने योग्य है कि मस्तिष्क के संदर्भ में कॉप्टर न्यूनतम विन्यास में था, अर्थात। एक कम्पास और जीपीएस के बिना, जो ऑर्डर के समय केवल एक साथ बेचे जाते थे और लगभग $ 300 खर्च होते थे।
कम्पास ने हमें बेहतर स्थिरीकरण के अलावा हेड लॉक और केयर फ्री जैसी सुविधाओं का वादा किया। पहला दिशा की अवधारण है, दूसरा आंदोलन की दिशा बदलने के बिना अपनी धुरी के चारों ओर सेप्टर को घुमाने की क्षमता है। ऐसा लगता है कि हमारे मामले में दो अति आवश्यक और उपयोगी विशेषताएं हैं।
गर्मियों तक, कम्पास का एक नया संस्करण ऑनलाइन स्टोर में दिखाई दिया, और यहां तक कि जीपीएस से भी अलग से। उन्होंने कोई पैसा नहीं बख्शा और सबसे तेज़ डिलीवरी का आदेश दिया।
लेकिन ... केयर फ्री के साथ पहली पहली उड़ान ने एक पागल पुलिस वाले को जन्म दिया, जिसने रिमोट कंट्रोल से किसी भी सिग्नल का जवाब देने से इनकार कर दिया था। यह निश्चित रूप से, एक इंजन, 3 प्रोपेलर, एक ईएससी धारक और यहां तक कि छोटी चीजों के चेहरे पर पीड़ितों के साथ एक महाकाव्य दुर्घटना में समाप्त हो गया। यह बेहतर हो सकता था, लेकिन टेस्ट फ्लाइट स्टेडियम में थी और कॉप्टर ने पूरी गति से गोल पोस्ट में उड़ान भरी, इस पर पकड़ा और अंदर चढ़ गया, नेट में उलझ गया। वैसे, स्कोर लंबे समय से हमारे पक्ष में नहीं है। भाग से, इसलिए, उस समय तक हम पहले ही स्पेयर पार्ट्स के साथ स्टॉक कर चुके थे और मरम्मत कोई समस्या नहीं थी। लेकिन तलछट बनी रही।
हेड लॉक ने भी आत्मविश्वास को प्रेरित नहीं किया और मैंने लगातार थ्रस्ट स्टेयरिंग से दिशा को और भी बदतर बना दिया। मैं तो यहां तक कहूंगा कि उन्होंने उसे बिल्कुल नहीं पकड़ा।
सामान्य तौर पर, उड़ान स्थिरता, अगर वृद्धि हुई है, तो यह अस्वीकार्य है।
उसके बाद, उन्होंने जीपीएस के साथ मॉड्यूल का आदेश नहीं देने का फैसला किया।
वैसे, बोर्ड पर एक बड़े कैमरे के साथ कॉप्टर ने अधिक स्थिर व्यवहार किया, हालांकि यह स्पष्ट था कि यह सीमा तक काम करता है। विशेष रूप से, हवा ने उसे उतना नहीं उड़ाया। आप उड़ानों के बारे में नहीं कह सकते हैं, उदाहरण के लिए, GoPro के साथ।
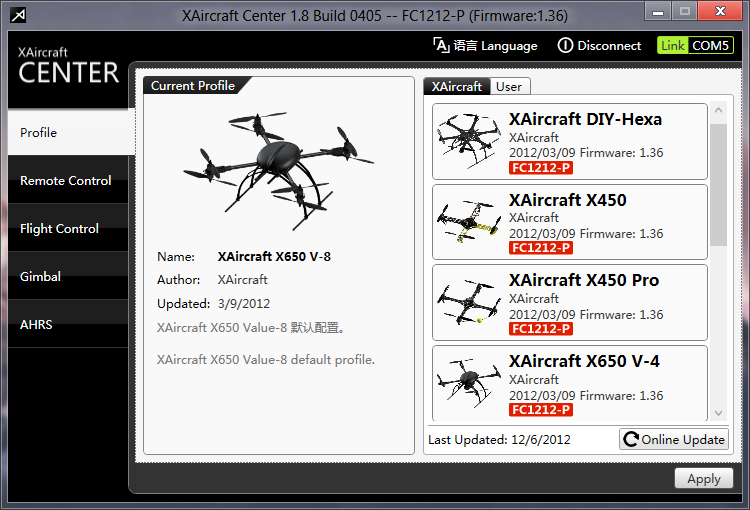
सॉफ्टवेयर के बारे में कुछ शब्द, जो आश्चर्यजनक रूप से अच्छा लगता है।
कनेक्ट करने के बाद, हम कई मॉडलों में से एक को डाउनलोड कर सकते हैं जो नेटवर्क के ऊपर कोप्टर के दिमाग में अपडेट किए जाते हैं। अभी भी अपना खुद का बनाने का अवसर है, लेकिन यह वास्तव में कट्टर है।
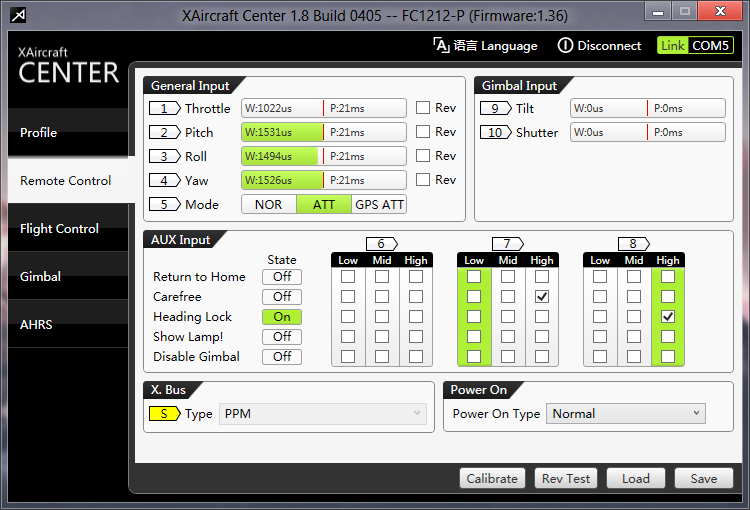
अगला रिमोट कंट्रोल के जॉयस्टिक्स (सामान्य इनपुट फ्रेम में उनकी स्थिति) को कैलिब्रेट करने और किसी भी अलग सुविधाओं के कुछ स्विच स्थापित करने के लिए पैनल है (Gimbral और AUX Input):
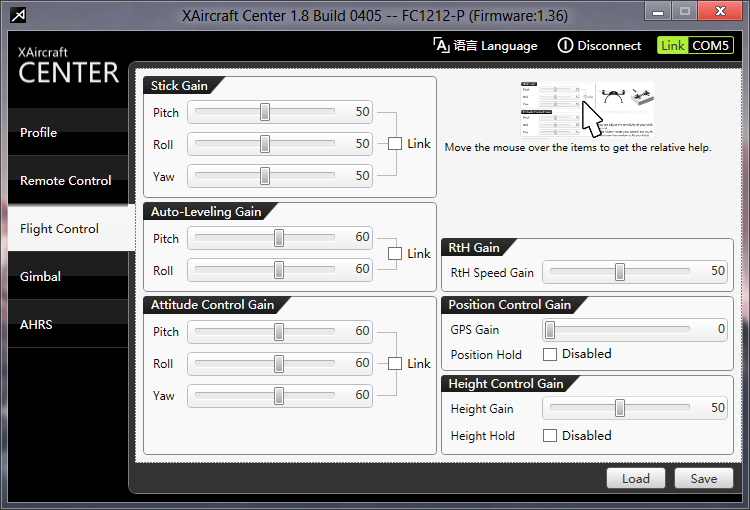
अगले टैब पर, हम कॉप्टर के व्यवहार को समायोजित कर सकते हैं:
Gimbral टैब पर - कैमरा जिम्बल सेटिंग्स।
और अंतिम पर - गाइरोस्कोप, एक्सेलेरोमीटर और कम्पास का अंशांकन और सत्यापन (ग्राफ़ दिखाता है कि मैंने कैसे कोप्टर को झटका दिया):
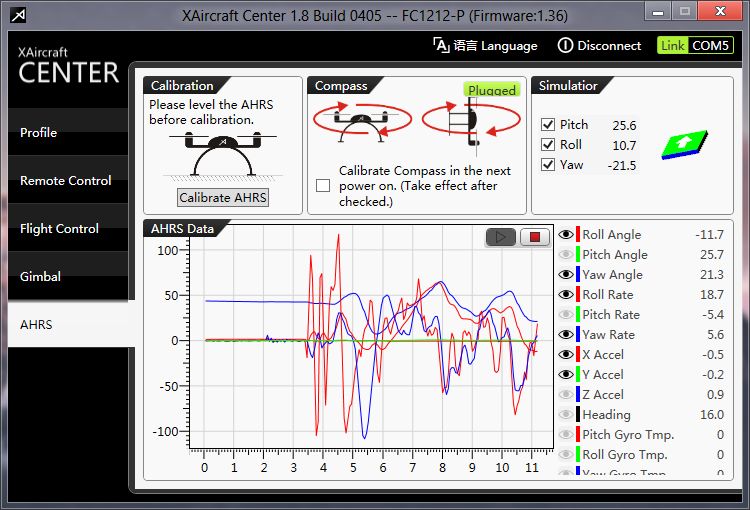
सॉफ्टवेयर, शायद, एक छोटे से बारीकियों के साथ, इस कोप्टर का सबसे सुखद हिस्सा बन गया। यदि आप डिस्कनेक्ट बटन को दबाए बिना यूएसबी तार को डिस्कनेक्ट करते हैं, तो प्रोग्राम कसकर जमा देता है - केवल रिबूट करने में मदद करता है।
गर्मियों में, उड़ानों के बीच में, हमने अक्सर NAZA के साथ प्लेटफ़ॉर्म को
DJI F550 में बदलने के बारे में सोचा। विशेष रूप से
इस वीडियो के बाद (2:00 बजे ध्यान!)।
लेकिन यह ठंडा हो रहा था, और एक बहुत ही निराला दिन पर एक और महाकाव्य दुर्घटना के बाद, हम पूरी तरह से ध्वस्त हो गए और अगले साल तक सब कुछ स्थगित करने का फैसला किया, एक अधिक शक्तिशाली कॉप्टर मॉडल के लिए बचा, दो प्रतियों में एफपीवी का एक पूरा सेट और वह सब।
अब हम दो विकल्पों के बीच विचार कर रहे हैं, कीमत में बराबर:
DJI S800 + DJI WKM और
MK Hexa XL + MK NaviCtrl + MK GPS।
इंटरनेट आमतौर पर जर्मन एमके को अधिक स्थिर और हवा के लिए प्रतिरोधी माना जाता है, लेकिन इसके तह डिजाइन के साथ S800 beckons, सैद्धांतिक रूप से अधिक स्थिर कार्बन आउट-ऑफ-बॉक्स प्रोपेलर और एक बहुत ही खुले दृष्टिकोण, जो
इस उदाहरण के लिए खुद
को प्रकट करता है।
X650 के लिए, मैं शायद निश्चित रूप से केवल FPV-shnikam को सलाह दे सकता था। कॉप्टर शक्तिशाली है - आप उस पर बहुत सारे कबाड़ लटका सकते हैं, अपनी क्षमताओं के लिए बहुत महंगा नहीं है, अच्छी तरह से, एक हत्यारा सुविधा - यह सिलवटों और बहुत कॉम्पैक्ट हो जाता है जब आपको इसे कहीं ले जाने की आवश्यकता होती है। हवाई फोटोग्राफी के लिए, IMHO, यह बहुत स्थिर नहीं है। यहां तक कि XAircraft के वीडियो खुद (जहां x650 जीपीएस के साथ स्थिर है) मेरी राय में उसी डीजेआई से क्लिप की तुलना में कुछ कम दिलचस्प लगते हैं।
मैं लगभग भूल गया, मैं अनुभव के साथ "पायलट" नहीं हूं, इसलिए मुझे कुछ तरीकों से गलत किया जा सकता है। यहां हम अपने अनुभव का वर्णन करते हैं, एक वर्ष का आकार, जो पूरी तरह से अलग-अलग परिस्थितियों में उड़ानों के साथ लगभग 50 सॉर्टिज़ के लिए जिम्मेदार है।
मुझे स्पष्टीकरण देने, सलाह देने और आम तौर पर रचनात्मक चर्चा करने में खुशी होगी।
और हां, मैं और भी बहुत कुछ लिख सकता था, लेकिन मैं इसमें से एजेंडा नहीं जोड़ सकता, लेकिन मुझे इस बात का जवाब देने में खुशी होगी कि मैं टिप्पणियों में क्या कर सकता हूं।
विषय संसाधन
निर्माताओं:
XAircraft:
www.xaircraft.comडीजेआई :
dji-innovation.comएमके:
mikrokopter.deविविध:
multicopterwiki.ruigorkandaurov.ru/wiikii/doku.phpmulticopter.orgऔर अंत में, हमारी कुछ तस्वीरें:

