यह हुआ! लंबे समय से प्रतीक्षित उत्तर "ड्राइवर" MSL जिज्ञासा के सवालों का जवाब है कि Habr
ने उससे
पूछा । पाओलो बेलुट्टा ने अवसर और आत्मा के साथ भी काम किया, इसलिए उनके पास समृद्ध अनुभव है, और सबसे महत्वपूर्ण बात, वह इसके बारे में बात करने में संकोच नहीं करते।
यह अद्भुत अनुवाद
सिंगरफोथफॉल द्वारा प्रदान किया
गया है । पाओलो का पाठ थोक में भेजा गया था, इसलिए हमने उत्तरों को आधे में विभाजित किया, और अनुवादक दूसरे भाग को प्रकाशित करेगा। इसलिए, आप उसे अब धन्यवाद दे सकते हैं, और आप बाद में, जब वह दूसरे भाग पर काम खत्म करता है और इसे बाहर करता है। [१]
[१]
वर्ग कोष्ठक में, अनुवादक के नोट्स।मैंने पूरा अंग्रेजी पाठ
Google पर पोस्ट किया है और जो कोई भी इसे चालू कर सकता है, लेकिन मुझे विश्वास है, यह आवश्यक नहीं है क्योंकि अनुवाद उत्कृष्ट है।
तो, चलिए शुरू करते हैं हमारा साक्षात्कार:
 प्रश्न: आपके काम का समय क्या है?
प्रश्न: आपके काम का समय क्या है?A: पहले 90 दिनों के दौरान, जिसके दौरान हम मंगल ग्रह के समय के अनुसार रहते थे, हम सामान्य कार्यक्रम में बदल गए। आमतौर पर, एक व्यावसायिक दिन सुबह 8 बजे से रात 8 बजे तक प्रशांत मानक समय (पीएसटी) चलता है। हम हर दिन काम करते हैं, जिसमें शनिवार और रविवार शामिल हैं, लेकिन आराम के लिए, उदाहरण के लिए, धन्यवाद और क्रिसमस पर। छुट्टियों से पहले, हमने पहले से कुछ दिनों के लिए टीमों को तैयार किया, इसलिए हम घर पर रहने में कामयाब रहे, लेकिन रोवर को बिना ब्रेक के काम करना पड़ा। जल्द ही हम एक 6-दिवसीय कार्य सप्ताह में बदल जाएंगे, और मंगल के टकराव के बाद [वह
क्षण जब सूर्य पृथ्वी और मंगल के बीच की रेखा पर होगा, यह अप्रैल में होगा] हम सामान्य रूप से पांच-दिवसीय एक पर स्विच करेंगे। हालाँकि रोवर अभी भी हर दिन काम करेगा, लेकिन [1] के पास कोई दिन नहीं है :-(
[१] [
पाओलो एक महिला रोवर की बात करता है - वह - जाहिरा तौर पर जहाजों के साथ समानता से, जिसके लिए इस सर्वनाम का उपयोग अंग्रेजी में भी किया जाता है। हालाँकि अब वे व्यावहारिक रूप से उसे अनुप्राणित कर रहे हैं और एक जहाज की तरह नहीं, बल्कि एक लड़की की तरह हैं :)
जेपीएल नासा में लिफ्ट के दरवाजे।

चूंकि यह रूसी दर्शकों के लिए असामान्य है, मैं सर्वनाम "वह" का उपयोग करूंगा - रोवर ]
प्रश्न: अगले दिन के आंदोलन कार्यक्रम के लिए कोड की जाँच / डीबग कैसे की जाती है? भेजने से पहले कितने लोग कोड की जाँच करते हैं? क्या रोवर भेजने से पहले संचलन कार्यक्रम की जांच करने के लिए एमुलेटर का उपयोग किया जाता है? यदि वे प्रस्तुत आंदोलन कार्यक्रम में त्रुटियां पाते हैं तो वे क्या करते हैं?एक: महान सवाल! टीमों को तैयार करने के लिए, हम JPL में इन उद्देश्यों के लिए विशेष रूप से विकसित सॉफ्टवेयर का उपयोग करते हैं। हमारे पास RoSE (रोबोट अनुक्रम संपादक) नामक एक विशेष संपादक है, जो सरलतम त्रुटियों को खोजता है - कमांड नामों में टाइपो, पैरामीटर मानों की श्रेणी में त्रुटियां, और इसी तरह। हाइपरड्राइव नामक एक सिम्युलेटर संपादक से जुड़ा हुआ है। यह उन छवियों को प्राप्त करता है जिन्हें पिछले सोलस में लिया गया था, और आसपास के रोवर क्षेत्र की त्रि-आयामी छवि दिखाती है। फिर सिम्युलेटर आदेशों की एक सूची प्राप्त करता है और दिखाता है कि रोवर क्या करेगा, और यह पर्यावरण के साथ कैसे संपर्क करेगा। आप स्थान और दिशा जैसे बुनियादी टेलीमेट्री का अनुकरण भी कर सकते हैं।
सबसे महत्वपूर्ण कार्यों के लिए, जैसे कि मैनिपुलेटर का उपयोग करके ड्रिलिंग करना, हम कभी-कभी एक प्रोटोटाइप का उपयोग करते हैं।
जब यह हमें लगता है कि कमांड सेट में त्रुटियां नहीं हैं, तो हम इसे सत्यापन के लिए अन्य ड्राइवरों के पास भेजते हैं। आमतौर पर कम से कम तीन लोग प्रत्येक शिफ्ट में काम करते हैं (एक ड्राइविंग विशेषज्ञ, रोबोट बांह का उपयोग करने में एक विशेषज्ञ, और उपकरणों का उपयोग करने में एक विशेषज्ञ), लेकिन कभी-कभी अधिक लोग बचे होते हैं और वे सभी तैयार टीमों की जांच करते हैं। पारी के दौरान, हम पांच औपचारिक चेक भी पास करते हैं, जो एक दर्जन लोगों के समूह द्वारा किए जाते हैं, और उनमें से सभी रोवर के ड्राइवर नहीं होते हैं, क्योंकि दैनिक कार्य के दौरान हमें विभिन्न उपकरणों का उपयोग करना पड़ता है, और हमें यह सुनिश्चित करने की आवश्यकता है कि कोई भी टीम नहीं कर सकती है। प्रवेश उपकरण विफलता, या, ठीक है, रोवर को नुकसान। हमारे पास आदेशों के अतिरिक्त सत्यापन के लिए सॉफ़्टवेयर और हर बार जाँच की जाने वाली चीज़ों की एक लंबी सूची है।
हम गलतियां नहीं करने की कोशिश करते हैं, लेकिन कभी-कभी वे होते हैं, और रोवर पर सॉफ़्टवेयर का एक बड़ा हिस्सा यह जांचना चाहिए कि कमांड अर्थहीन नहीं हैं, और हम रोवर में ही लेजर से शूटिंग जैसी कोई बेवकूफी करने की कोशिश नहीं कर रहे हैं। यहां तक कि अगर हम पृथ्वी पर यहां एक गलती करते हैं, तो मंगल पर एक रोवर इसका पता लगाएगा।
प्रश्न:
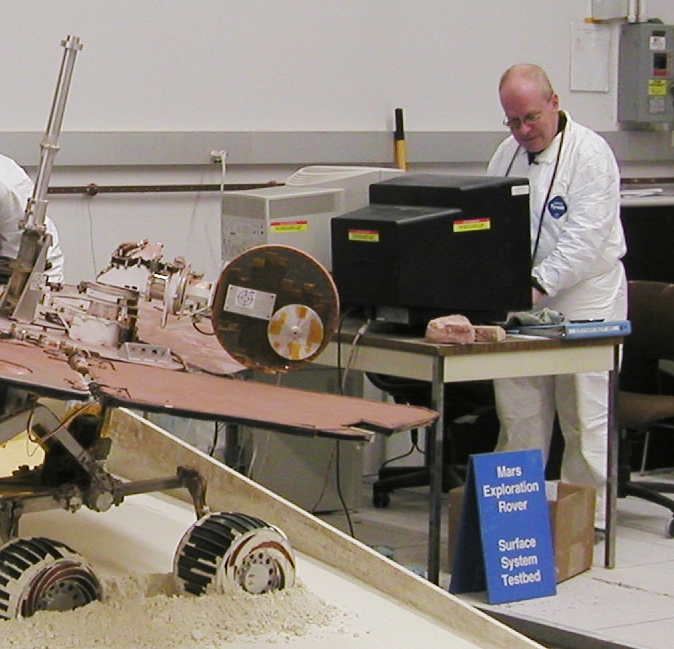
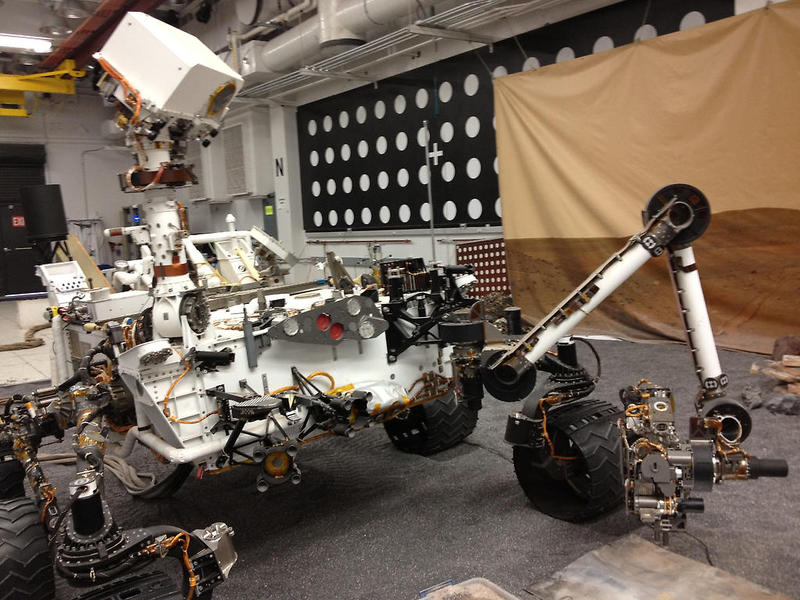
पृथ्वी पर परीक्षण कैसे किया जाता है (क्या गृह ग्रह पर रेगिस्तान में रोवर की एक प्रति है?)एक: हमारे पास दो डिवाइस हैं। पहले को वीएसटीबी (व्हीकल सरफेस टेस्टेड) कहा जाता है, और सभी उपकरण उस पर स्थापित होते हैं, जिसमें कैमरे और एक हाथ भी शामिल है, इसलिए हम इसे ठीक उसी तरह से नियंत्रित कर सकते हैं जैसे मंगल पर रोवर। हर बार हमें कार्यक्रम की विशेष विश्वसनीयता सुनिश्चित करने की आवश्यकता होती है, हम इसका उपयोग करते हैं। यहाँ - photojournal.jpl.nasa.gov/catalog/PIA15876 - उनकी फोटो है। दूसरी इकाई, जिसे स्केयरक्रो कहा जाता है, केवल पहियों और एक इंजन से सुसज्जित है। हम इसका उपयोग विभिन्न प्रकार की सतहों पर आंदोलन का परीक्षण करने के लिए करते हैं।
हमारे पास JPL में दो प्रशिक्षण मैदान हैं, उनमें से एक भवन में, इसे इन-सीटू इंस्ट्रूमेंट प्रयोगशाला कहा जाता है:

और दूसरा - खुली हवा में - मंगल यार्ड, वहाँ हम आंदोलन के लिए और अधिक परीक्षण कर सकते हैं।
(
फ्रेम में 0:33 पर पाओलो चमकता है - केबल खींचता है )
रोवर को उतारने से पहले मई 2012 में, हमने कैलिफोर्निया में डेथ वैली के पास स्केयरक्रो को रेगिस्तान में फेंक
दिया, ताकि यह पता चल सके कि यह रेत में कैसे व्यवहार करता है, क्योंकि यह हमें परेशान करता है कि रोवर रेत के टीलों पर उतर सकता है।
प्रश्न:
प्रोग्रामर किस पर प्रशिक्षण देते हैं?A: हम एक दूसरे को सिखाते हैं। किसी को प्रबंधन में अनुभव है, किसी को रोवर बनाने में मदद मिली, किसी ने सॉफ्टवेयर लिखने में भाग लिया। मेरा विश्वास करो, यह सब अनुभव और अभ्यास की बहुत आवश्यकता है।

प्रश्न:
क्यूरियोसिटी रोवर पूरे नियोजित अनुसंधान कार्यक्रम को चलाने के बाद, क्या यह शैक्षिक वैज्ञानिक प्रयोगों को करने के लिए छात्रों के निपटान में रोवर के संसाधनों और समय (यदि यह उस समय चालू होगा) का हिस्सा प्रदान करने की योजना है?A: वास्तव में, विभिन्न विश्वविद्यालयों के वैज्ञानिक और छात्र बड़ी संख्या में इस मिशन पर काम कर रहे हैं। उनका कार्य यह तय करना है कि हमें उनके प्रयोग की प्रगति का संचालन और निगरानी के लिए कौन से प्रयोग करने चाहिए। ईमानदारी से, मुझे नहीं लगता कि हम कभी भी अपने सभी प्रयोगों को समाप्त कर देंगे, क्योंकि उनकी सूची लगातार अपडेट की जाती है - जैसे ही हमें किसी एक प्रश्न का उत्तर मिलता है, हमारे पास तुरंत 10 अन्य होते हैं!
प्रश्न:
क्या मंगल ग्रह की खोज के लिए नासा के पिछले उपकरणों के लैंडिंग स्थलों पर घूमने की योजना है? उनमें से ज्यादातर पहले ही विफल हो गए हैं, लेकिन मौके पर असली कारण स्थापित करना दिलचस्प होगा। इसके अलावा, एक बार इन दिग्गज उपकरणों की तस्वीरों में एक बहुत ही उच्च सौंदर्य, और भौतिक मूल्य होगा।उ: फिलहाल, हमारा मुख्य लक्ष्य ग्रह का अधिक से अधिक अन्वेषण करना है, इसलिए जहां हम पहले से ही हैं, वहां लौटना बहुत उपयोगी नहीं होगा, भले ही हम अधिक साधनों के साथ लौटें। इस कारण को समझने के लिए कि हमारे पुराने रोबोट क्रम से बाहर हैं फिर भी नए वैज्ञानिक डेटा एकत्र करने की तुलना में एक कम महत्वपूर्ण कार्य है। इसलिए, हालांकि मैं इन उपकरणों को फिर से देखने की आपकी इच्छा साझा करता हूं, मुझे नहीं लगता कि निकट भविष्य में ऐसा होगा।
प्रश्न:
आप 7 मिनट की सिग्नल देरी की समस्या का समाधान कैसे करते हैं? और क्या यह एक बड़ी समस्या है?ए: दूरी के कारण सिग्नल देरी 5 से 20 मिनट तक एक तरह से बदलती है। अब यह समय अधिकतम के करीब है, और लगभग 19 मिनट है। बेशक, रोवर को अंतःक्रियात्मक रूप से नियंत्रित करने में सक्षम होने के लिए विलंब बहुत लंबा है। इसके बारे में सोचो - यदि आपको रोवर के सामने एक बाधा दिखाई देती है, और तुरंत रोकने के लिए एक कमांड भेजते हैं, तो सबसे छोटी संभव देरी के साथ भी आपको पहले से ही 10 मिनट देर हो जाएगी! इसलिए, हम हर दिन आदेशों का एक क्रम भेजकर इसका प्रबंधन करते हैं। इसके अलावा, हम रोवर को अंतःक्रियात्मक रूप से नियंत्रित नहीं कर सकते हैं क्योंकि पृथ्वी हमेशा गेल क्रेटर से दिखाई नहीं देती है, जिसमें क्यूरियोसिटी स्थित है। और अंत में, भले ही आप इस सब को ध्यान में न रखें, रोवर को कॉल करना काफी महंगा है - लगभग $ 10,000 प्रति घंटे!
सामान्य तौर पर, डेटा प्राप्त करने से पहले की देरी आमतौर पर और भी अधिक होती है, क्योंकि हम मंगल ओडिसी और मार्स रिकॉइनेंस ऑर्बिटर उपग्रहों के माध्यम से संकेत संचारित करते हैं। रोवर्स से डेटा प्राप्त करने में आमतौर पर कम से कम कई घंटे लगते हैं।
प्रश्न:
क्या कोई उपकरण या उपकरण है जो आपके काम में उत्सुकता का अभाव है?एक: अधिक वैज्ञानिक उपकरण, एक अधिक शक्तिशाली कंप्यूटर, डेटा भंडारण के लिए अधिक स्थान, उनके स्थानांतरण के लिए अधिक विकल्प, अधिक ऊर्जा, एक उच्च संकल्प कैमरा, एक उच्च मस्तूल ...
प्रश्न:
क्या ऐसे मामले हैं जब आपने एक दिन के लिए एक कार्यक्रम लिखा था, लेकिन पहले से ही इसके निष्पादन के दौरान, यह स्पष्ट हो गया कि यह एक महत्वपूर्ण त्रुटि नहीं थी जो कि कार्यक्रम में क्रेप है, जिसे ठीक करने में बहुत देर हो चुकी है, लेकिन यदि देर नहीं हुई, तो आप इसे कैसे ठीक करते हैं?A: बिल्कुल! एमईआर पर, हमें लैंडिंग के कुछ वर्षों बाद मिला। 18 वीं सोल पर स्पिरिट रोवर में एक महत्वपूर्ण बग पाया गया था, और दूसरा हमें 2007 में मिला, जब हमने विक्टोरिया क्रेटर की यात्रा की। हमारे पास विशेषज्ञों की एक टीम है (स्वयं सहित) जो रोवर के टेलीमेट्री का विश्लेषण करती है। हर बार जब हम कुछ ऐसा करते हैं जो हमें अजीब लगता है, तो हम परीक्षण बेंच पर जाते हैं और स्थितियों को फिर से बनाने की कोशिश करते हैं और देखते हैं कि क्या समस्या स्वयं प्रकट होती है। जब हमें इसका कारण पता चलता है, हम या तो कई हजार सॉफ्टवेयर मापदंडों में से एक को बदल सकते हैं, या एक पैच भेज सकते हैं, जो समस्या को हल करने के लिए डिज़ाइन किए गए कोड का एक छोटा टुकड़ा है। खैर, और जाहिर है, समस्या हल होने के बाद, हम उन परिस्थितियों से बचने की कोशिश करते हैं जिनमें इसकी पुनरावृत्ति संभव है।
प्रश्न:
आपके काम में सबसे मुश्किल क्या है?एक: ठीक है, सभी कागजी कार्रवाई के अलावा जो कि जिज्ञासा प्रबंधन प्रक्रिया का हिस्सा है ... ;-) सभी प्रकार की समस्याओं की कल्पना करना बहुत मुश्किल है। बेशक, हमारे पास मंगल ग्रह पर रोवर को प्रबंधित करने का विशाल अनुभव है, लेकिन हमें अभी भी हमेशा अपने गार्ड पर रहना होगा, अगर कुछ गलत हो जाता है। उदाहरण के लिए, जब हम रोवर को स्थानांतरित करते हैं, तो हम हमेशा कम से कम एक रास्ता छोड़ने की कोशिश करते हैं, जिसके लिए यदि आवश्यक हो, तो यह निश्चित रूप से वापस जा सकता है। हम उन कार्यों से बचने की भी कोशिश करते हैं, जो बहुत ही असंभावित होने पर भी विनाशकारी परिणाम पैदा कर सकते हैं।
प्रश्न:
आपके पास क्या विषमताएं या असामान्य परिस्थितियां थीं?A: सबसे मजेदार मामलों में से एक 2006 में MER के काम के दौरान हुआ। सामान्य तौर पर, यह मिशन केवल 90 सोलोव के लिए डिज़ाइन किया गया था, और जब सॉफ्टवेयर लिखा गया था, तो सोल के नंबर के भंडारण के लिए केवल तीन अंक सौंपे गए थे। 999 वें सोल के पास आते ही, हमने एक सॉफ्टवेयर अपडेट तैयार किया, और रोवर्स के लिए एक नया संस्करण अपलोड किया। यह एक टाइटैनिक का काम था - अपडेट और टेस्ट लिखने में हमें पूरा एक साल लग गया, साथ ही रोवर्स को अपडेट डाउनलोड करने में कई महीने लग गए। नए ऑन-बोर्ड सॉफ्टवेयर [2] को भी ग्राउंड-आधारित सॉफ़्टवेयर में परिवर्तन की आवश्यकता थी [3], क्योंकि यह अपने पुराने संस्करण के साथ असंगत था। इसलिए, हमें एक ही सोल में दोनों रोवर्स को फिर से लोड करने की आवश्यकता थी, ताकि ऐसा न हो कि उनमें से एक पहले से ही नए सॉफ्टवेयर पर काम कर रहा था, और दूसरा अभी भी पुराने पर था। तो यह दिन अंत में आ रहा है। आत्मा को पहले रिबूट करने के लिए सम्मानित किया जाता है, हम नए सॉफ़्टवेयर के साथ एक रिबूट कमांड भेजते हैं, रोवर एक उत्तर भेजता है, सब कुछ बहुत अच्छा है। इस समय अवसर ग्रह के दूसरी तरफ है, और हमें उसे सही टीम भेजने से पहले 12 घंटे इंतजार करना होगा। और उससे ठीक पहले, JPL में बैकबोन [
ट्रंक लाइन ] काट दिया गया है, और इसके बिना हम अपने सर्वरों से DSN [डीप स्पेस नेटवर्क] स्टेशन तक कमांड प्रसारित नहीं कर सकते। तो, समय समाप्त हो रहा है, और रीढ़ अभी भी काम नहीं कर रही है। क्या करना है? सौभाग्य से, नियंत्रण केंद्र के कंप्यूटरों में से एक DSN स्टेशन के साथ एक सीधी रेखा थी (कैनबरा में, ऐसा लगता है), और इस कंप्यूटर में भी एक ... फ्लॉपी ड्राइव था! सौभाग्य से, एमईआर कंप्यूटरों में से एक में एक फ्लॉपी ड्राइव भी है, लेकिन 2006 में फ्लॉपी डिस्क किसके पास होगी? लेकिन कुछ और नहीं बचा था, और हम एक फ्लॉपी डिस्क की तलाश में प्रयोगशाला के चारों ओर दौड़ना शुरू कर दिया। हमें अंततः कुछ भूल गए डेस्क दराज में फ्लॉपी डिस्क मिली, इसे जल्दी से सुधार दिया, कमांड की प्रतिलिपि बनाई, और उन्हें भेजने के लिए नियंत्रण केंद्र पर भाग गया। अंत में, हमारे पास दो मिनट भी बचे थे!
[२] [
पाओलो शब्द उड़ान सॉफ्टवेयर का उपयोग करता है, जो कि विमानन और अंतरिक्ष यात्रियों में आमतौर पर "उड़ान नियंत्रण सॉफ्टवेयर" होता है। इस मामले में, हमारा मतलब उस सॉफ्टवेयर का हिस्सा है जो रोवर पर ही है। ]
[३] [
पाओलो शब्द ग्राउंड सॉफ्टवेयर का उपयोग करता है, और उस सॉफ्टवेयर के भाग को संदर्भित करता है जो पृथ्वी पर उपयोग किया जाता है ]
प्रश्न:
कितने लोग रोवर को नियंत्रित करते हैं?उ: ठीक है, यह इस बात पर निर्भर करता है कि आप "शासन" शब्द से क्या मतलब रखते हैं। अब हमारे पास 16 ड्राइवर हैं, लेकिन विभिन्न उपकरण (कैमरा, एसएएम, चेमिन, केमैमका ...) योग को नियंत्रित करने वाले लोगों की टीम, जैसा कि मुझे लगता है, लगभग 100 लोग।
प्रश्न:
क्या रोवर पर "मूर्ख के खिलाफ सुरक्षा" एक अंतर्निहित है?A: आप जानते हैं, जैसा कि वे कहते हैं, मूर्ख के खिलाफ पूर्ण "रक्षा नहीं" हो सकती है, क्योंकि मूर्ख बहुत आविष्कारशील होते हैं।
प्रश्न:
यदि हाथ-जोड़तोड़ का प्रोग्राम किया गया मूवमेंट ध्वस्त हो सकता है, उदाहरण के लिए, कुछ एंटीना या रोवर बॉडी में दुर्घटनाग्रस्त हो जाता है, तो क्या ऐसे प्रोग्राम को स्वचालित रूप से ब्लॉक किया जाएगा (उदाहरण के लिए, कंप्यूटर मॉडल पर जांच के बाद), या क्या इसे मैन्युअल रूप से मॉनिटर करना होगा?A: रोवर सॉफ्टवेयर यह जाँचता है कि क्या इसका कोई भाग दूसरों के साथ टकरा सकता है, इसलिए इस मामले में कमांड को केवल निष्पादित नहीं किया जाएगा, एक त्रुटि उत्पन्न होगी, और रोवर मैनिप्युलेटर को रोक देगा। यदि निम्न में से कोई भी आदेश जोड़तोड़ की स्थिति पर निर्भर करता है (उदाहरण के लिए, एक लेज़र से एक शॉट), तो ये क्रियाएं भी नहीं की जाएंगी।
लेकिन यह देखते हुए भी कि यह सॉफ्टवेयर रोवर की सुरक्षा करता है, हम अभी भी दो बार (तीन बार और चार बार) चेक-इन करते हैं कि ऐसा नहीं हो सकता। हम यह भी सुनिश्चित करने की कोशिश करते हैं कि ऐसा नहीं हो सकता भले ही मैनिपुलेटर, या रोवर के अन्य भागों, वे काफी नहीं हैं जहां उन्हें होना चाहिए। कभी-कभी मंगल पर सटीक स्थितियों की भविष्यवाणी करना असंभव है। बेशक, हमारे पास कैमरे और क्षेत्र का एक 3 डी मानचित्र है, लेकिन इस डेटा में हमेशा माप त्रुटियों से जुड़े गलतियां हो सकती हैं। इसलिए, हमें यह सुनिश्चित करने की आवश्यकता है कि प्रोग्राम की गई क्रियाओं को सुरक्षित रूप से निष्पादित किया जाएगा भले ही त्रुटि काफी अधिक हो।

प्रश्न:
रोवर के साथ क्या संबंध है? इसके लिए कौन से एंटेना / मोडेम का उपयोग किया जाता है? निम्न स्तर के प्रोटोकॉल क्या हैं? उच्च-स्तरीय प्रोटोकॉल सूचना प्रसारित करने में त्रुटियों से कैसे निपटते हैं?A: हम DSN स्टेशनों में से एक का उपयोग करके पृथ्वी से सीधे रोवर एंटीना पर कमांड भेजते हैं, जिसे HGA (हाई गेन एंटीना) कहा जाता है। संचार एक्स-बैंड (7-8 गीगाहर्ट्ज) में है। यहाँ इस
PDF में आप वो सभी जानकारी पा सकते हैं जिसकी आप कल्पना कर सकते हैं।
डेटा जो रोवर दिन के लिए एकत्र करता है, उसे यूएचएफ एंटीना [4] का उपयोग करके वापस भेज दिया जाता है - यह आरटीजी के दाईं ओर एक काले सिलेंडर की तरह दिखता है [यह
जमीन की नकल पर काला है, और मंगल पर यह चांदी की पन्नी में है, आरटीजी आरटीजी, प्राइम जेलेनीकोट ] है उपग्रहों में से एक (एमआरओ या ओडीवाई), जिसके बाद उपग्रहों को डीएसएन स्टेशनों (फिर से एक्स-बैंड में, अगर मैं गलत नहीं हूं) के लिए डेटा संचारित करता हूं। आमतौर पर, हमें MER से प्राप्त डेटा की मात्रा लगभग 100 मेगाबिट्स थी। MSL से बहुत अधिक डेटा आता है - औसतन लगभग 500 मेगाबिट्स, लेकिन एक बार हमारे पास 1200 मेगाबाइट्स का वास्तव में विशाल स्थानांतरण हो गया था।
[४] [
अति उच्च आवृत्ति ]
प्रश्न: पृथ्वी की तुलना में मार्टियन स्थितियों में तस्वीरें खींचने की मुख्य विशेषताएं और अंतर क्या हैं? मार्टियन "फोटोग्राफर" के पास क्या अतिरिक्त ज्ञान होना चाहिए? उदाहरण के लिए, क्या कुछ रंगों का प्रभुत्व या क्षरण अलग-अलग तरीके से होता है, जो हम पृथ्वी पर देखने के लिए उपयोग किए जाते हैं, जैसे कि ये अंतर पानी के नीचे की फोटोग्राफी में ध्यान देने योग्य हैं। वे मुख्य रूप से मानव आंख से परिचित तस्वीरों में रुचि रखते हैं, बल्कि उन तस्वीरों के बजाय जो स्पेक्ट्रम के अदृश्य हिस्से को दर्शाते हैं।ए: माइक कैपलिंगर [
कैमरों के लिए जिम्मेदार लोगों में से एक ] इस सवाल पर बहुत अधिक जानकारी प्रदान कर सकता है, लेकिन मैं निश्चित रूप से जवाब देने की कोशिश करूंगा।
मंगल का वातावरण पृथ्वी की तुलना में बहुत पतला है, और बहुत अधिक पूर्वानुमान है। वातावरण में धूल की एक निश्चित मात्रा होती है, इसलिए बड़ी दूरी पर आपको तस्वीर में कुछ गिरावट दिखाई देगी; कभी-कभी वातावरण लॉस एंजिल्स की खाड़ी में गंदी हवा की तरह दिखता है। पृथ्वी की तुलना में सूर्य से बहुत दूर होने के कारण, मंगल को थोड़ा कम प्रकाश प्राप्त होता है, लेकिन कुल मिलाकर, जैसा कि मुझे लगता है, कोई महत्वपूर्ण अंतर नहीं है। वास्तव में, पृथ्वी पर एक तस्वीर लेना मंगल ग्रह की तुलना में अधिक कठिन है, क्योंकि यहां आपको रंग, चमक और विपरीतता में बहुत अधिक अंतर मिलेगा।
प्रश्न:
क्या रोवर की शूटिंग का कार्यक्रम अन्य दैनिक कार्यक्रमों की तुलना में अधिक कठिन था?
[
ऐसा लगता है कि पाओलो को सवाल समझ में नहीं आया। हमने एक स्व-चित्र के बारे में पूछने की कोशिश की, और वह इस वीडियो शूटिंग - नोट के बारे में जवाब देता है। ज़ेलीनिकॉट ]:
A: मार्स स्पेस साइंस सिस्टम्स द्वारा विकसित कैमरों को 15 हर्ट्ज (या फ्रेम प्रति सेकंड, यदि आप चाहते हैं) पर वीडियो कैप्चर करने के लिए डिज़ाइन किया गया है, और उनके पास अंतर्निहित मेमोरी है, इसलिए हमारे लिए यह कोई समस्या पेश नहीं करता है। केवल समस्याएं जो संभावित रूप से उत्पन्न हो सकती हैं, वे हैं वीडियो की अवधि, फ्रेम दर, और यह सुनिश्चित करना है कि वीडियो सही समय पर शुरू हो और कैमरे सही दिशा में घुमाए जाएं। फिर से, माइक कैपलिंगर ने इस प्रश्न का उत्तर मुझे और अधिक विस्तार से दिया।
प्रश्न:
क्या किसी आपातकालीन स्थिति से स्वयं-पुनर्प्राप्ति के लिए कोई एल्गोरिदम है, या जब ऐसा होता है, तो कार्यक्रम बाधित होता है और डिवाइस स्टैंडबाय मोड में प्रवेश करता है?उ: आपातकाल के मामले में कार्रवाई के कई स्तर हैं। अगर हम भेजे गए कमांड में कोई त्रुटि पाई जाती है, तो रोवर उन्हें निष्पादित करने से मना कर देगा। यदि समस्या कमांड के निष्पादन के दौरान होती है (जैसा कि मैंने ऊपर उल्लेख किया है कि हाथ के साथ उदाहरण में), रोवर एक त्रुटि संदेश भेजेगा और बस एक या एक से अधिक उपकरणों का उपयोग करने से इनकार करेगा। अंत में, यदि सॉफ्टवेयर में किसी प्रकार की बग है, तो रोवर रिबूट होगा और "सुरक्षित मोड" में जाएगा। इस स्थिति में, वह एक त्रुटि संदेश भेजने सहित कार्यों का एक पूर्व-प्रोग्राम सेट करेगा, और काम जारी रखने के लिए पृथ्वी से निर्देशों का इंतजार करेगा। सॉफ़्टवेयर फ्रीज़ होने की स्थिति में, हमारे पास वॉचडॉग टाइमर हैं जो रोवर को पुनः आरंभ कर सकते हैं और इसे सुरक्षित मोड में डाल सकते हैं। इसलिए हमारे पास मौत की नीली स्क्रीन नहीं है।में:रोवर के कौन से पैरामीटर आप "वास्तविक समय" मोड में इसके लिए ट्रैक करते हैं या इसके करीब हैं?A: मुझे उम्मीद है कि ऊपर दिए गए प्रश्न का उत्तर इस प्रश्न का उत्तर है।प्रश्न: रोवर की सुरक्षा प्रणाली किन मामलों में स्वतंत्र रूप से कार्यक्रम को समाप्त करती है?A: ऐसा लगता है कि MSL पर हमारे पास एक हार्डवेयर रिबूट था, लेकिन मुझे याद नहीं है कि इसका कारण क्या था। एमईआर ने कई बार रिबूट किया, जिसमें प्रोसेसर और मेमोरी पर विकिरण के प्रभाव के कारण दोहराए गए मामले शामिल थे। रिबूट के कारण के आधार पर, ऐसी स्थितियों को महत्वहीन माना जाता है (जैसा कि ब्रह्मांडीय विकिरण के साथ मामला है), या महत्वपूर्ण (जैसे कि 18 वीं सोल पर आत्मा विसंगति)।प्रश्न: क्या किसी आपात स्थिति से उबरने के लिए एल्गोरिदम हैं?A: जैसा कि मैंने अभी कहा, यह उन कारणों पर निर्भर करता है जो आपातकाल का कारण बने।प्रश्न: क्या जिज्ञासा DTN डेटा ट्रांसफर प्रोटोकॉल / आर्किटेक्चर का उपयोग करती है, और यदि हां, तो न्यूनतम पैकेट विलंब क्या हैं?ए: न्यूनतम देरी 5 मिनट है, अधिकतम 20 है, लेकिन चूंकि हम वास्तविक समय में रोवर्स के साथ काम नहीं करते हैं, इसलिए यह देरी नियंत्रण को प्रभावित नहीं करती है। हम DTN का उपयोग नहीं करते हैं, लेकिन हमारे पास कुछ प्रौद्योगिकियां हैं जो इतनी लंबी दूरी पर संचार स्थापित करने में मदद करती हैं। आमतौर पर एक सोल के लिए हम जितना ट्रांसफर कर सकते हैं उससे कहीं अधिक डेटा इकट्ठा करते हैं, इसलिए हमें यह चुनना होगा कि प्रत्येक सोल में कौन सा डेटा पृथ्वी पर भेजा जाएगा। डेटा के प्रत्येक टुकड़े को प्राथमिकता मिलती है, और उनमें से सबसे महत्वपूर्ण को पहले स्थान पर प्रेषित किया जाएगा, और कम महत्वपूर्ण को बाद में भेजा जाएगा (या बिल्कुल नहीं भेजा जाएगा)। बेशक, अगर हम अचानक तय करते हैं कि डेटा के महत्व को गलत तरीके से आंका गया है, तो हम प्राथमिकताएं बदल सकते हैं। उदाहरण के लिए, यदि एक लघु पर हम देखते हैं कि कैमरा गलत दिशा में बदल गया था, तो हम या तो प्राथमिकता कम करते हैं,या हम पूर्ण-आकार की छवि को पूरी तरह से हटा देते हैं, और इसके विपरीत: यदि हमारे पास एक बेहतर प्रदर्शन के साथ एक छवि है, तो इसकी प्राथमिकता बढ़ जाएगी। इसके अलावा, डेटा को पैकेट में विभाजित किया गया है - यह बड़ी मात्रा में जानकारी स्थानांतरित करने के लिए महत्वपूर्ण है, उदाहरण के लिए, समान छवियां। यही कारण है कि आपके द्वारा देखी गई कुछ छवियों में छेद थे। डेटा का हिस्सा ट्रांसमिशन के दौरान खो गया हो सकता है, या त्रुटियों के साथ प्रेषित हो सकता है। बेशक, त्रुटियों के मामले में, हम डेटा को फिर से स्थानांतरित करने का प्रयास कर सकते हैं।डेटा का हिस्सा ट्रांसमिशन के दौरान खो गया हो सकता है, या त्रुटियों के साथ प्रेषित हो सकता है। बेशक, त्रुटियों के मामले में, हम डेटा को फिर से स्थानांतरित करने का प्रयास कर सकते हैं।डेटा का हिस्सा ट्रांसमिशन के दौरान खो गया हो सकता है, या त्रुटियों के साथ प्रेषित हो सकता है। बेशक, त्रुटियों के मामले में, हम डेटा को फिर से स्थानांतरित करने का प्रयास कर सकते हैं।<.....>जैसा कि आप देख सकते हैं, साक्षात्कार का यह हिस्सा अधिक पेशेवर निकला। यहां हमने पाओलो को एक जेपीएल विशेषज्ञ के रूप में मान्यता दी। मैंने प्रश्नों को वितरित किया, ताकि पहले वे गंभीर थे, और फिर काफी नहीं। दूसरा भाग भी काफी गंभीर था, लेकिन वह एक व्यक्ति के रूप में पाओलो के बारे में अधिक बात करेगा, साथ ही क्यूरियोसिटी और मार्टियंस के बीच संबंध, नासा में ब्लैक हायरिंग में लोगों के बारे में, और क्या मंगल के रोवर के चालक सपने देखते हैं।यदि आप वास्तव में जारी रखना चाहते हैं, तो मैं आपको नासा की वेबसाइट पर इस छोटे से पाओलो साक्षात्कार को अभी देखने के लिए पेश कर सकता हूं , और धैर्य रखें और अनुवाद पूरा होने पर कुछ दिनों का इंतजार करें। एक बार फिर धन्यवाद, अपने काम के लिए सिंगरफ़ॉफ़्टफ़।जारी रखा जाए।