
सभी को नमस्कार। मैं कैमरे के लिए 2 मीटर लंबा एक सरल और सस्ती टाइमलैप्स स्लाइडर बनाने में अपने अनुभव को साझा करना चाहता हूं (मेरे मामले में, फोन एक कैमरा के रूप में कार्य करता है)।
उत्पादन की आवश्यकता बेलारूस में होने वाले मोबाइल सिनेमा वेलकम स्मार्टफिल्म 2013 के त्योहार में भाग लेने की इच्छा के संबंध में उत्पन्न हुई।
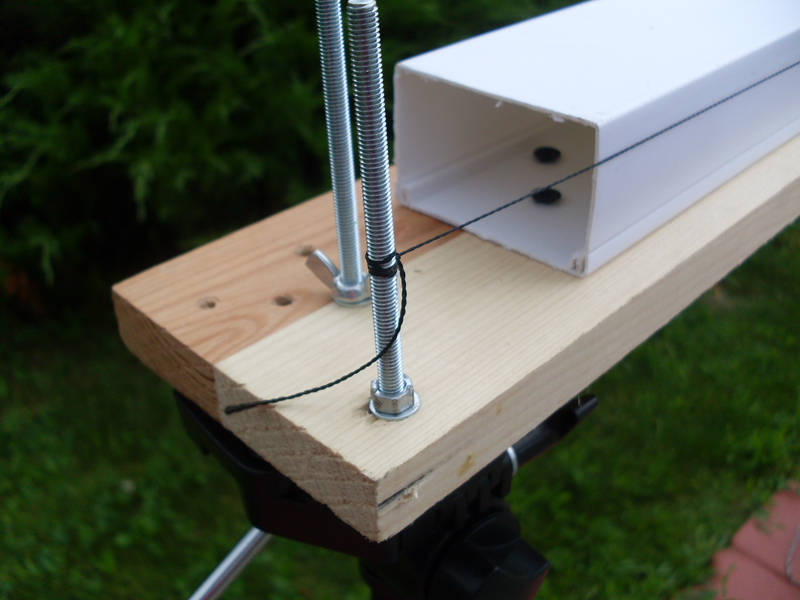
और इसलिए ... स्लाइडर में 2 मुख्य भाग होते हैं: मैकेनिकल (गाइड, चलती गाड़ी और आंदोलन तंत्र) और इलेक्ट्रिक (मोटर और नियंत्रण प्रणाली)। यदि स्लाइडर के अंतिम भाग के साथ सब कुछ कम या ज्यादा स्पष्ट था, तो एक पुराने प्रिंटर से लॉन्चपैड MSP430 बंडल + L298N ड्राइवर + द्विध्रुवीय स्टेपर मोटर। उस यांत्रिकी ने बहुत सोच विचार किया, क्योंकि सब कुछ "सस्ता और हंसमुख" होना चाहिए। खरीदे गए गाइड के विकल्प उनकी कीमतों की जांच करने के तुरंत बाद गायब हो गए। और अंत में, इंटरनेट पर एक लंबी खोज के बाद, मैंने 60 मिमी चौड़ी केबल बिछाने के लिए एक प्लास्टिक बॉक्स का उपयोग करना बंद कर दिया। यह गाड़ी की चिकनी आवाजाही के लिए काफी टिकाऊ और चिकनी थी, लेकिन बहुत अधिक लचीली थी और इसलिए बॉक्स के स्नैप-ऑन ढक्कन को स्क्रू के साथ उपयुक्त आकार (15 मिमी मोटी, 90 मिमी चौड़ा और बॉक्स की लंबाई की तुलना में थोड़ा लंबा) के शिकंजा के साथ खराब कर दिया गया था। अगला, हम ढक्कन पर बॉक्स को स्नैप करते हैं और अपना गाइड प्राप्त करते हैं। तिपाई के लिए हटाने योग्य स्टैंड संलग्न करने के लिए बोर्ड छेद के किनारों पर बनाया गया था।
कैरिज मॉडल को इंटरनेट पर बहुत व्यापक रूप से लिया गया था। कुछ भी जटिल नहीं है: एक एल्यूमीनियम कोने (आप इसे निकटतम हार्डवेयर स्टोर पर खरीद सकते हैं, मैं सिर्फ एक मोटा होने की सलाह देता हूं), 8 बीयरिंग (8 मिमी के एक आंतरिक व्यास के साथ मिला) और कुछ नट, बोल्ट, वाशर और उत्कीर्णन। कट, ड्रिल और इकट्ठा। सबसे महत्वपूर्ण बात यह है कि बीयरिंग बढ़ते के लिए छेदों को सही ढंग से चिह्नित करें, अन्यथा गाड़ी सभी बीयरिंगों के साथ बॉक्स की सतह को नहीं छूएगी और एक मामूली खेल दिखाई देगा।
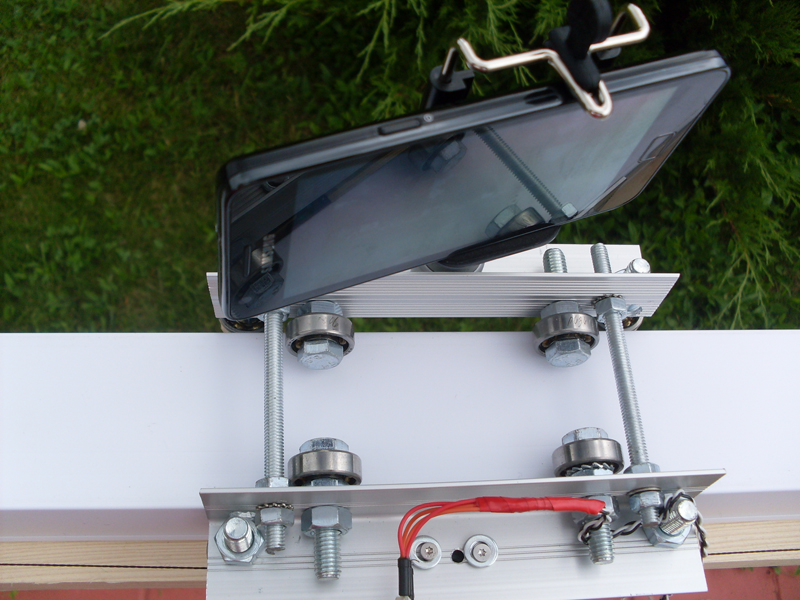
गाड़ी का शीर्ष दृश्य
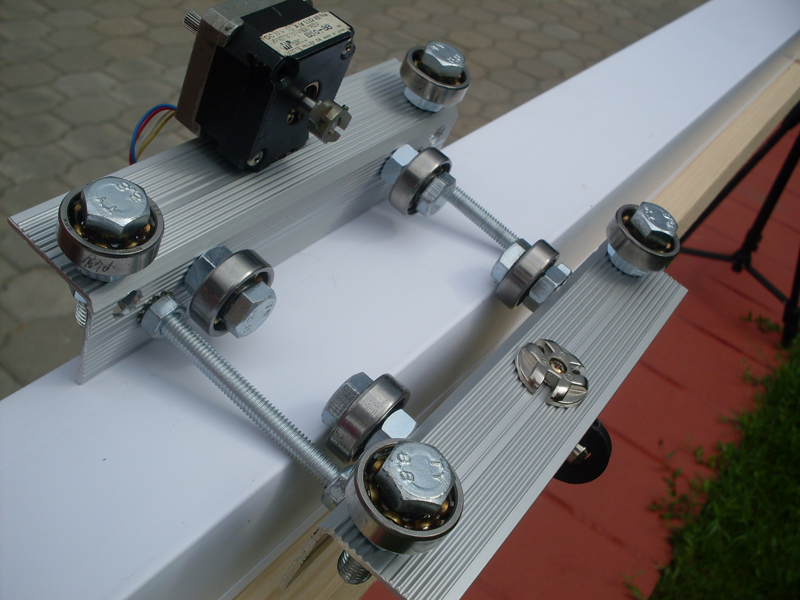
गाड़ी पलटी
आंदोलन तंत्र ने मूल रूप से एक 2 मीटर लंबे हेयरपिन और अखरोट का उपयोग करने की योजना बनाई थी, लेकिन स्टड ने इतना अधिक परिमार्जन किया कि लंबे स्लाइडर को 1.4 मीटर तक कम करने की भी अनुमति नहीं दी। एकमात्र सही और सही निर्णय एक टाइमिंग बेल्ट का उपयोग करना था, लेकिन यह हाथ में नहीं था और चीन से ऑर्डर करना और प्रतीक्षा करना मुझे शोभा नहीं देता था (त्योहार समय से बाहर चल रहा था)। किसी तरह, संयोग से, विचार एक बेल्ट के बजाय एक धागे का उपयोग करने का आया। पहला परीक्षण सभी अपेक्षाओं को पार कर गया - यह काम किया और बहुत अच्छी तरह से काम किया। यह इस तरह किया गया था: शाफ्ट की एक तरफ शाफ्ट की ऊंचाई पर, निश्चित स्टेपर मोटर। एक नायलॉन धागा बंधा हुआ था, फिर मोटर शाफ्ट के चारों ओर एक मोड़ बनाया गया था, और फिर धागे को खींचकर स्लाइडर के दूसरी तरफ बांध दिया गया था।
हम विद्युत भाग की ओर मुड़ते हैं।
नियंत्रण प्रणाली प्रति सेकंड 1 से 1024 इंजन चरणों की गति को समायोजित कर सकती है और आंदोलन की दिशा बदल सकती है। विनम्रता से, लेकिन मुझे और अधिक की आवश्यकता नहीं है।
नियंत्रण प्रणाली का "मस्तिष्क" लॉन्चपैड MSP430 (msp430g2553) है। कोड बहुत सरल है और एनर्जिया में लिखा गया है। कोड सार्वभौमिक है और आसानी से किसी भी Arduino बोर्ड के लिए फिर से बनाया जा सकता है। हालाँकि प्रति क्रांति 400 कदम एक द्विध्रुवीय स्टेपर मोटर पर लिखे गए थे, व्यवहार में यह केवल 200 निकला। कम गति पर काम की चिकनाई बढ़ाने के लिए, मैंने मोटर-नियंत्रण का उपयोग आधे-चरण मोड में करने का फैसला किया और हमें अपने 400 कदम / मोड़ मिले। वापस।

MSP430 के लिए प्रोग्राम कोड int m1=8; int m2=9; int m3=10; int m4=11; int key=5; int analog=A0; int time=0; int keyin=0; void setup() { pinMode(m1, OUTPUT); pinMode(m2, OUTPUT); pinMode(m3, OUTPUT); pinMode(m4, OUTPUT); pinMode(key, INPUT_PULLUP); } void loop() { keyin=digitalRead(key); if (keyin==HIGH) { time = analogRead(analog);
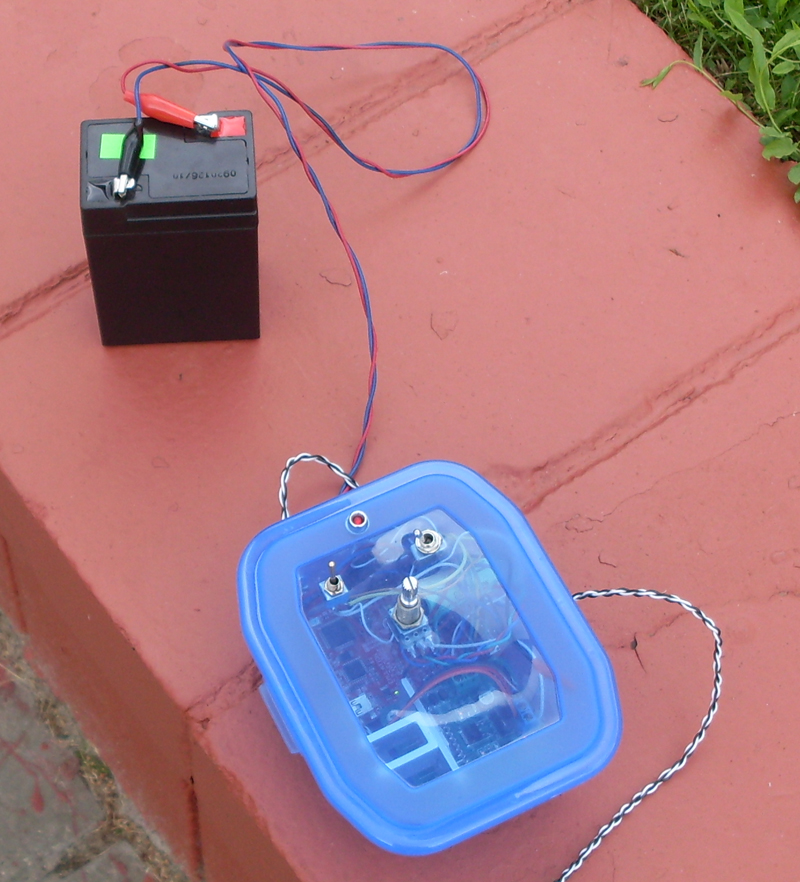
हम इंजन को L298N ड्राइवर, एक दिशा चयनकर्ता स्विच, एक चर अवरोध (गति नियंत्रक), और एक एलईडी के माध्यम से नियंत्रक से जोड़ते हैं, जो हमारे सिस्टम के शामिल होने का एक संकेतक होगा।
एक छोटा प्लास्टिक नाश्ता कंटेनर आदर्श रूप से रिमोट कंट्रोल केस की भूमिका के लिए उपयुक्त था।

नियंत्रक के लिए एक छोटे आकार की 3V बैटरी को शक्ति स्रोत के रूप में चुना गया था, और इंजन को पावर देने के लिए एक मानक 6V 4.5Ah बैटरी का उपयोग किया गया था। बिजली की आपूर्ति करने के लिए, संपर्कों की एक जोड़ी के साथ एक टॉगल स्विच प्रदान किया जाता है, जो बैटरी और बैटरी दोनों को क्रमशः ड्राइवर और नियंत्रक से जोड़ता है। माप से पता चला है कि 8 में से 4 चरणों में इंजन 0.45 ए का उपभोग करता है, और शेष 4 चरणों में 8 - 0.9 ए से पता चलता है कि कुछ 0.7 ए के बारे में है - यह इंजन की लगभग औसत खपत है, जो देता है हमें पूरी तरह से चार्ज की गई बैटरी (वास्तव में, यह) से लगभग 5-6 घंटे के ऑपरेशन की आवश्यकता होती है।
स्लाइडर को ही देखें।


वीडियो स्लाइडर काम पर।
अधिक स्पष्टता के लिए। पहले परीक्षण का वीडियो देखें। लैपटॉप पर काली चीज बैटरी GP1245 (12V 4.5 आह) का वजन लगभग 2 किलो है। लैपटॉप का वजन लगभग 2.5 किलोग्राम है। कुल मिलाकर, 4.5 किलोग्राम का भार बिना किसी समस्या के यात्रा करता है।
ऑपरेशन के दौरान, निम्नलिखित नुकसान देखे गए:
1. धागा समय के साथ बढ़ता है (लेकिन इससे काम पर कोई प्रभाव नहीं पड़ता)
2. कभी-कभी शाफ्ट के चारों ओर लूप में धागे के इनपुट और आउटपुट को पार किया जाता है और इसके कारण गाड़ी की थोड़ी सी चंचलता होती है।
3. समय के साथ थोड़ा मुड़ा हुआ बोर्ड (मेरे लिए महत्वपूर्ण नहीं)
यह पहला लेख है, इसलिए अधिक न्याय न करें।
अरे हाँ ...
यहां त्योहार के लिए एक वीडियो है, जहां आप देख सकते हैं कि मैंने इस स्लाइडर का उपयोग करके क्या फिल्माया है।
ध्यान देने के लिए आप सभी का धन्यवाद।