 प्रकाश की किरण की यात्रा के समय की माप के
प्रकाश की किरण की यात्रा के समय की माप के आधार पर मौजूदा 3 डी सेंसर, जैसे किनेक्ट, अगर दृश्य पारभासी और परावर्तक सतहों नहीं है जो प्रकाश किरणों के पथ को अपवर्तित और विकृत कर देता है, तो किन्कट जैसे मानचित्र की गहराई को अच्छी तरह से संकलित कर सकते हैं। बारिश, पानी के जेट, कोहरे या कांच या पारदर्शी प्लास्टिक से बनी वस्तुएं बस दूर की वस्तुओं को अस्पष्ट करती हैं, क्योंकि सेंसर केवल सिग्नल के पहले प्रतिबिंब को पहचानता है।
पिछले हफ्ते हांगकांग में सिगग्राफ एशिया सम्मेलन में, एमआईटी मीडिया लैब के वैज्ञानिकों
ने उसी सिद्धांत के आधार पर
एक नया विकास प्रस्तुत किया । यह एक पारंपरिक लेजर डायोड और एक सस्ती सेंसर का उपयोग करता है। उपकरण की लागत केवल 500 डॉलर थी। प्रोटोटाइप और वाणिज्यिक एनालॉग्स, जैसे किनेक्ट, के बीच एकमात्र महत्वपूर्ण अंतर फर्मवेयर है।
केवल समय-समय पर एक इन्फ्रारेड लेजर के दालों को संशोधित करने के बजाय, एमआईटी प्रोटोटाइप विशेष रूप से चयनित पल्स अनुक्रमों का उपयोग करता है, जिसमें एक बहुत ही संकीर्ण एकल शिखर के साथ एक ऑटोकैरेक्शन फ़ंक्शन होता है (सिग्नल देरी समय को सही ढंग से मापने के लिए इकोलोकेशन और दूरसंचार में ऐसे संकेतों का उपयोग किया जाता है। अधिक जानकारी के लिए, लेख "
मूल सिद्धांत" देखें। डिजिटल वायरलेस कम्यूनिकेशन। लिकेबीज़ ", सेक्शन" ऑटोकैरेलेशन फंक्शन। बार्कर कोड्स ") में। कैमरा अच्छी तरह से एक पारदर्शी वस्तु की सतह से पहले प्रतिबिंबों और बाद में अधिक दूर की वस्तुओं से अलग प्रतिबिंबों के बीच अंतर करता है। यहां तक कि वह एक मैट स्क्रीन द्वारा बंद किए गए शिलालेख की एक स्पष्ट छवि प्राप्त करने में सक्षम है।
एमआईटी का विकास पिछले काम पर आधारित है: एक पिकोसेकंड समय रिज़ॉल्यूशन वाला एक कैमरा, और
इसके आधार पर बनाया गया एक सिस्टम जो एक अपारदर्शी बाधा के पीछे स्थित वस्तुओं की छवियों को कैप्चर कर सकता है। प्रणाली एक फेमटोसेकेंड लेजर फ्लैश से परावर्तित संकेत के आगमन के समय को मापने पर आधारित है। इसी तरह लिडार, राडार और इको साउंडर्स काम करते हैं। हालांकि, प्रोटोटाइप कैमरा की लागत, कोने के चारों ओर सहूलियत देने में सक्षम, लगभग आधा मिलियन डॉलर की राशि है, इसके लिए एक लंबे अंशांकन और सिग्नल प्रोसेसिंग की आवश्यकता होती है।
परियोजना प्रतिभागी अशुता कदंबी द्वारा Youtube पर पोस्ट किए गए
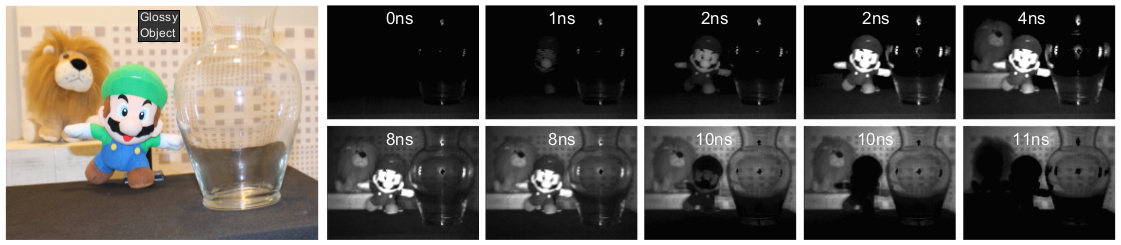
वीडियो में स्पष्ट रूप से दिखाया गया है कि कैसे कैमरा दृश्य में प्रकाश नाड़ी के सामने की प्रगति को देखता है। सबसे पहले, कैमरा पारदर्शी वस्तु की सतह से प्रतिबिंब और चमक को मानता है, और फिर - पारदर्शी के पीछे छिपी अन्य वस्तुओं की छवि।
फ़्रेम में दर्पण के साथ वीडियो में, प्रकाश के मोर्चे की प्रगति विशेष रूप से अच्छी तरह से देखी जाती है:
नई प्रणाली में व्यावसायिक उपयोग के लिए बहुत अच्छी संभावनाएं हैं, क्योंकि यह मौजूदा सस्ती और बड़े पैमाने पर बिकने वाले हार्डवेयर पर काम कर सकती है। एक प्रारंभिक प्रोटोटाइप लगभग चार सेकंड के लिए एकल फ्रेम प्रसंस्करण पर खर्च करता है, इसलिए गंभीर अनुकूलन के बाद वास्तविक समय के संचालन की उम्मीद करना काफी संभव है। एक नए सिद्धांत पर बनाए गए सेंसर सैद्धांतिक रूप से मानवरहित वाहनों में बहुत महंगे लिडार को बदल सकते हैं और इस तरह उनके द्रव्यमान को करीब ला सकते हैं, उनका उपयोग दवा में किया जा सकता है, और सामान्य तौर पर वे हार्डवेयर को बदले बिना 3D कैमरों की लगभग सभी विशेषताओं में उल्लेखनीय सुधार कर सकते हैं।
प्रोजेक्ट पृष्ठ पर आप तकनीक के विस्तृत विवरण के साथ वीडियो और पीडीएफ डाउनलोड कर सकते हैं।