
हम
Sphero और इसके
SDK की क्षमताओं का पता लगाना जारी रखते हैं।
एजेंडा टैबलेट के एक्सेलेरोमीटर का उपयोग करके रोबोट को नियंत्रित कर रहा है और बाधाओं के साथ टकराव का पता लगा रहा है।
सिद्धांत की बिट
पिछले लेख में, हमने पहले ही जांच की कि
स्फीरो कौन
है और
विजुअल स्टूडियो 2013 का उपयोग करके विंडोज 8.1 पर प्रोग्रामेटिक रूप से इसे कैसे शुरू किया जाए।
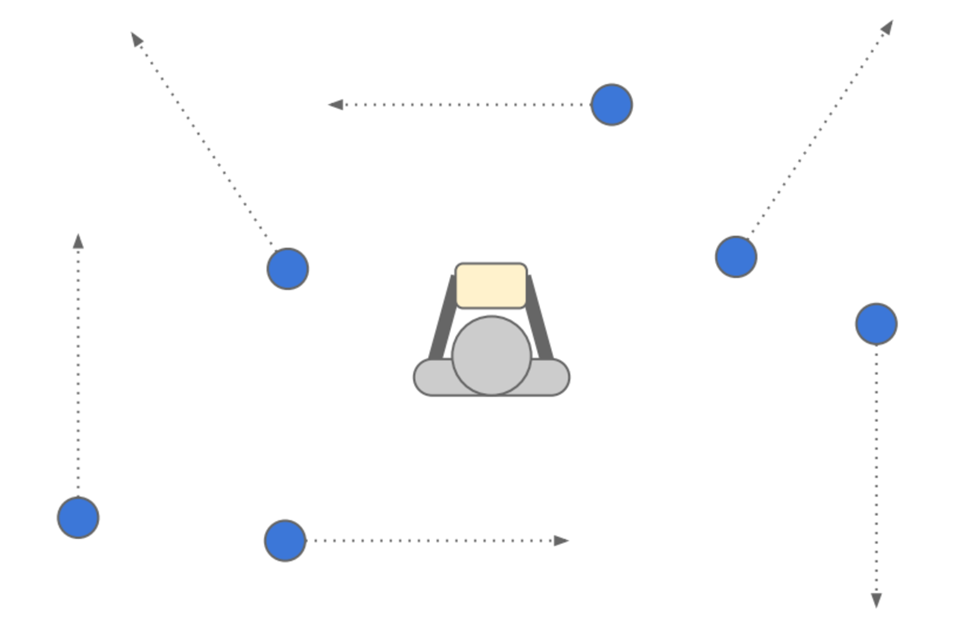
अब हम अधिक जटिल चीजों से निपटेंगे। हम टैबलेट को अलग-अलग दिशाओं में झुकाकर "स्टीयर" करना सीखेंगे और एक बाधा के साथ टकराव का पता लगाएंगे। ऐसा करने के लिए, हम अपने टेबलेट के एक्सेलेरोमीटर और बाहरी दुनिया के साथ रोबोट के टकराव सेंसर का उपयोग करेंगे।
accelerometer
विंडोज 8.1 ऑपरेटिंग सिस्टम और WinRT ऑब्जेक्ट मॉडल समर्थन निम्नलिखित सेंसर के साथ काम कर रहा है, जब तक कि निश्चित रूप से, डिवाइस उनके पास है:
- accelerometer;
- कम्पास;
- gyrometer;
- प्रकाश संवेदक;
- कोण नापने का यंत्र;
- जियोलोकेशन।
एक्सेलेरोमीटर एक ऐसा मॉड्यूल है जो तीन दिशाओं में गति को मापता है। यह मॉड्यूल कई आधुनिक उपकरणों से लैस है। एक्सेलेरोमीटर डेटा तक पहुंचने के लिए, आपको
एक्सेलेरोमीटर ऑब्जेक्ट तक पहुंचने की आवश्यकता है, जो निम्नलिखित गुणों के साथ
एक्सेलेरोमीटर रीडिंग ऑब्जेक्ट तक पहुंच प्रदान करता है:
- त्वरण: एक्स अक्ष के साथ त्वरण प्रदर्शित करता है;
- त्वरण: Y अक्ष के साथ त्वरण प्रदर्शित करता है;
- त्वरण: Z अक्ष के साथ त्वरण प्रदर्शित करता है;
- टाइमस्टैम्प: डेटा कैप्चर करने के लिए लिए गए समय को परिभाषित करता है।
जब एक्सेलेरोमीटर रीडिंग बदल जाती है तो हम उस घटना की सदस्यता लेंगे और रीडिंग के आधार पर हम रोबोट को गति देंगे, गति बढ़ाएंगे, धीमा करेंगे या इसे घुमाएंगे।
आप एक्सेलेरोमीटर रीडिंग ईवेंट की सदस्यता ले सकते हैं।
एक्सेलेरोमीटर इवेंट सब्सक्रिप्शनprotected override void OnNavigatedTo(NavigationEventArgs e) { … Accelerometer _accelerometer = Accelerometer.GetDefault(); _accelerometer.ReadingChanged += new TypedEventHandler<Accelerometer, AccelerometerReadingChangedEventArgs>(ReadingChanged); … } async private void ReadingChanged(object sender, AccelerometerReadingChangedEventArgs e) { … }
विस्थापन
मान लीजिए कि हमें टैबलेट से एक्सीलेरोमीटर डेटा मिला है। अब हमें अंतरिक्ष में स्फेरो को स्थानांतरित करने के लिए उनका उपयोग करने की आवश्यकता है।
Windows 8.1 के लिए Sphero SDK में एक
रोल विधि है जो Sphero के आंदोलन को संभालती है और दो मापदंडों को स्वीकार करती है:
- हेडिंग - आंदोलन के कोण।
इसकी गणना इस प्रकार की जाती है:

यह 0 से 359 तक की सीमा में मान लेता है। - गति - गति की गति।
0 - नहीं चलती है।
255 - अधिकतम गति।
डिफ़ॉल्ट रूप से, Sphero अपने काम की शुरुआत संकेतक x = 0, y = 0, हेडिंग = 0, गति = 0 से करता है।
टक्कर डिटेक्टर
कोलियर
डिटेक्शन के रूप में स्फेरो ऐसी मज़ेदार चीज़ का समर्थन करता है। यह निर्देशांक के अंतर पर बहुत
आदिम रूप से काम करता है।
Windows 8.1 के लिए Sphero SDK में पहले से ही एक तैयार किया गया
CollisionDetectedEvent इवेंट है जिसके लिए आप वास्तविक दुनिया की वस्तुओं के साथ टकराव की सदस्यता ले सकते हैं और पकड़ सकते हैं।
घटना का विवरण private void OnRobotConnected(object sender, Robot robot) { … robot.CollisionControl.StartDetectionForWallCollisions(); robot.CollisionControl.CollisionDetectedEvent += OnCollisionDetectedEvent; … }
यदि आप पहली बार टकराव सेंसर चालू करना याद रखेंगे तो यह घटना शुरू हो जाएगी:
robot.CollisionControl.StartDetectionForWallCollisions();
जब आपको सेंसर की आवश्यकता नहीं है, तो इसे बंद करें:
robot.CollisionControl.StopDetection();
स्फेरो एसडीके की कुछ उपयोगी विशेषताएं
रोबोट के साथ काम करने के लिए, हमें Windows 8.1 के लिए निम्नलिखित Sphero SDK विधियों की भी आवश्यकता है:
SetBackLED (तीव्रता) - रोबोट की बैकलाइट चालू करें ताकि आप समझ सकें कि यह कहां जाएगा। मान:
1.0f - पूरी शक्ति से चालू होता है।
0.0f - अक्षम करता है।
SetHeading (शीर्षक) - रोबोट को घुमाएं। यह 0 से 359 तक मान लेता है।
SetRGBLED (लाल, हरा, नीला) - गेंद का रंग सेट करें।
रोल (शीर्षक, गति) - आंदोलन की गति और गति की दिशा निर्धारित करें:
शीर्षासन - आंदोलन के कोण। यह 0 से 359 तक की सीमा में मान लेता है।
गति - गति की गति। 0 - नहीं चलती है। 255 - अधिकतम गति।
नींद () - रोबोट को सोने के लिए रखो।
Pazrabotka
कार्य
एक्सेलेरोमीटर का उपयोग करके रोबोट को स्थानांतरित करें। यदि आप एक बाधा का सामना करते हैं, तो रोबोट को लाल रंग से पेंट करें।
उपकरण
प्रक्रिया है
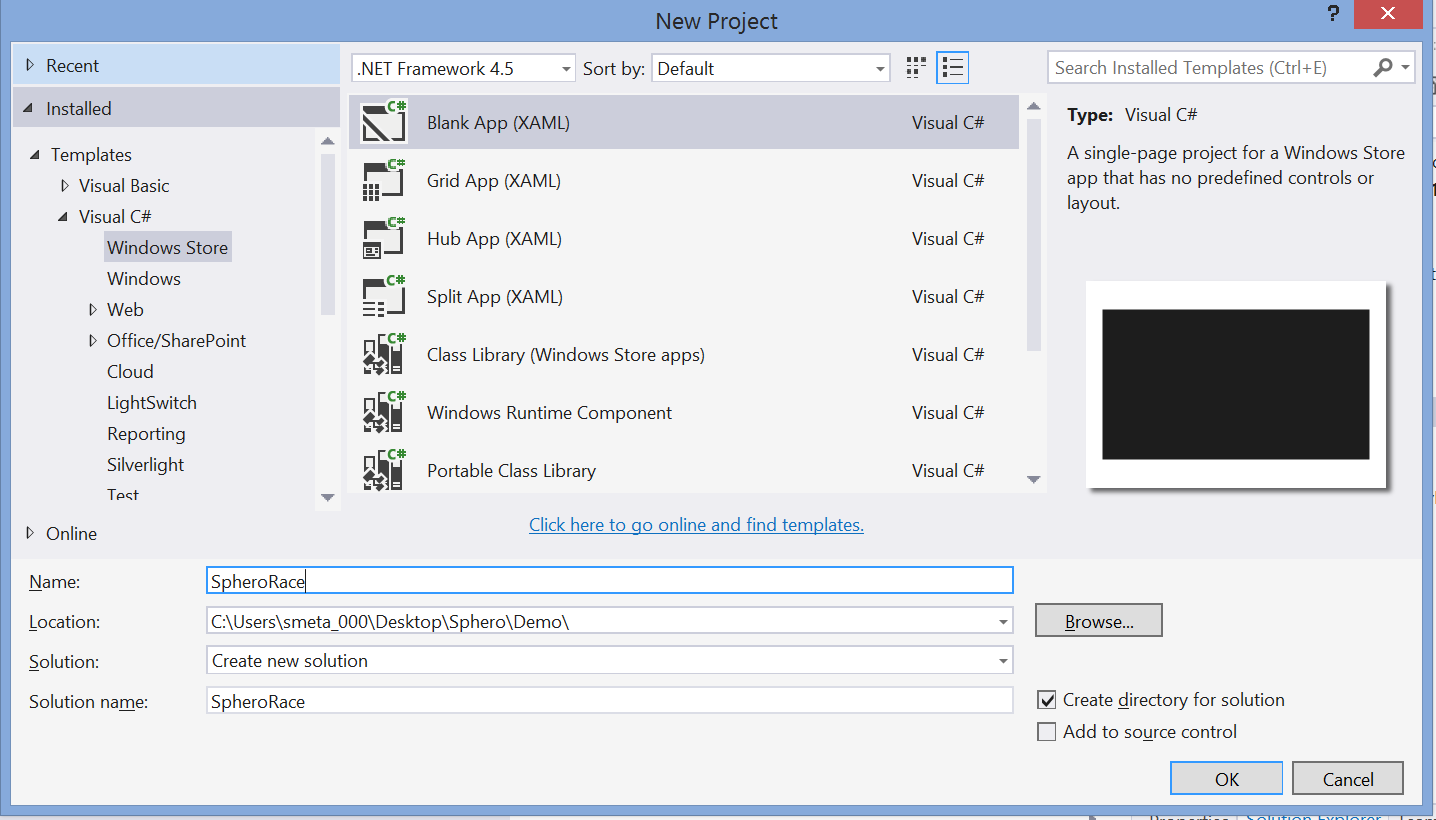
1. विज़ुअल स्टूडियो 2013 खोलें और प्रोजेक्ट फ़ाइल बनाएँ / नया / प्रोजेक्ट /
खाली ऐप ।
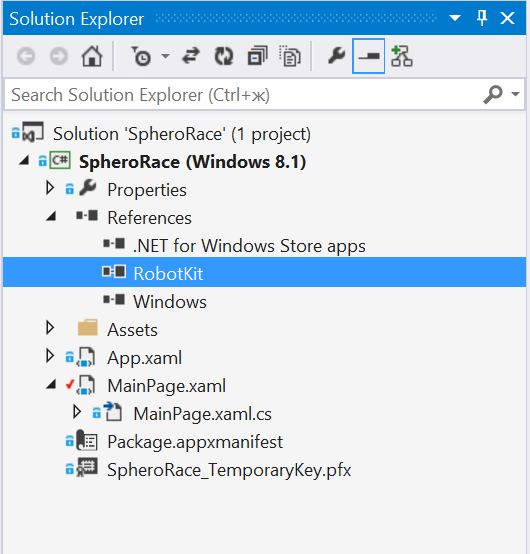
2. हम विंडोज 8.1 के लिए
Sphero SDK से असेंबली
RobotKit.dll कनेक्ट करते हैं
3. आवेदन के लिए ब्लूटूथ RFCOMM समर्थन जोड़ें। कोड संपादन मोड में
Package.appxmanifest खोलें और
क्षमता अनुभाग में निम्न कोड जोड़ें।
आवेदन के लिए ब्लूटूथ RFCOMM समर्थन <wb:DeviceCapability Name="bluetooth.rfcomm"> <wb:Device Id="any"> <wb:Function Type="serviceId:00001101-0000-1000-8000-00805F9B34FB" /> </wb:Device> </wb:DeviceCapability>
4. आवेदन की मुख्य स्क्रीन पर:
- रोबोट स्थिति स्विच (कनेक्ट नहीं जुड़ा);
- स्थिति प्रदर्शित करने के लिए पाठ फ़ील्ड;
- गेम शुरू करने और रोकने के लिए बटन को स्टार्ट और स्टॉप करें।
MainPage.xaml फ़ाइल खोलें और इसे वहां जोड़ें।
अनुप्रयोग मुख्य स्क्रीन <Page x:Class="SpheroRace.MainPage" xmlns="http://schemas.microsoft.com/winfx/2006/xaml/presentation" xmlns:x="http://schemas.microsoft.com/winfx/2006/xaml" xmlns:local="using:SpheroRace" xmlns:d="http://schemas.microsoft.com/expression/blend/2008" xmlns:mc="http://schemas.openxmlformats.org/markup-compatibility/2006" mc:Ignorable="d" > <Grid Margin="100" > <Grid.RowDefinitions > <RowDefinition Height="60"/> <RowDefinition Height="60"/> <RowDefinition/> </Grid.RowDefinitions> <Grid.ColumnDefinitions> <ColumnDefinition/> <ColumnDefinition/> </Grid.ColumnDefinitions> <TextBlock x:Name="SpheroName" Grid.Row="0" Grid.Column="0" Text="No Sphero Connected" FontSize="24"/> <ToggleSwitch x:Name="ConnectionToggle" Grid.Row="1" Grid.Column="0" Toggled="ConnectionToggle_Toggled" /> <Button Name="StartBtn" Click="StartBtn_Click" Grid.Row="2" Grid.Column="0" Content="Start" VerticalAlignment="Bottom" HorizontalAlignment="Left" Padding="100" ></Button> <Button Name="StopBtn" Click="StopBtn_Click" Grid.Row="2" Grid.Column="1" Content="Stop" VerticalAlignment="Bottom" HorizontalAlignment="Right" Padding="100" IsEnabled="False" ></Button> </Grid> </Page>
5.
MainPage.xaml.cs पर जाएं और गेम के तर्क का वर्णन करें। स्फेरो के साथ संवाद करने के लिए, हम एसडीके द्वारा प्रदान किए गए ऑब्जेक्ट मॉडल का उपयोग करते हैं।
खेल तर्क public sealed partial class MainPage : Page { private Sphero m_robot = null; private long m_lastTimeMs; private double m_currentX = 0; private double m_currentY = 0; private bool m_isStarted = false; private const string c_noSpheroConnected = "No Sphero Connected"; private const string c_connectingToSphero = "Connecting to {0}"; private const string c_spheroConnected = "Connected to {0}"; public MainPage() { this.InitializeComponent(); }
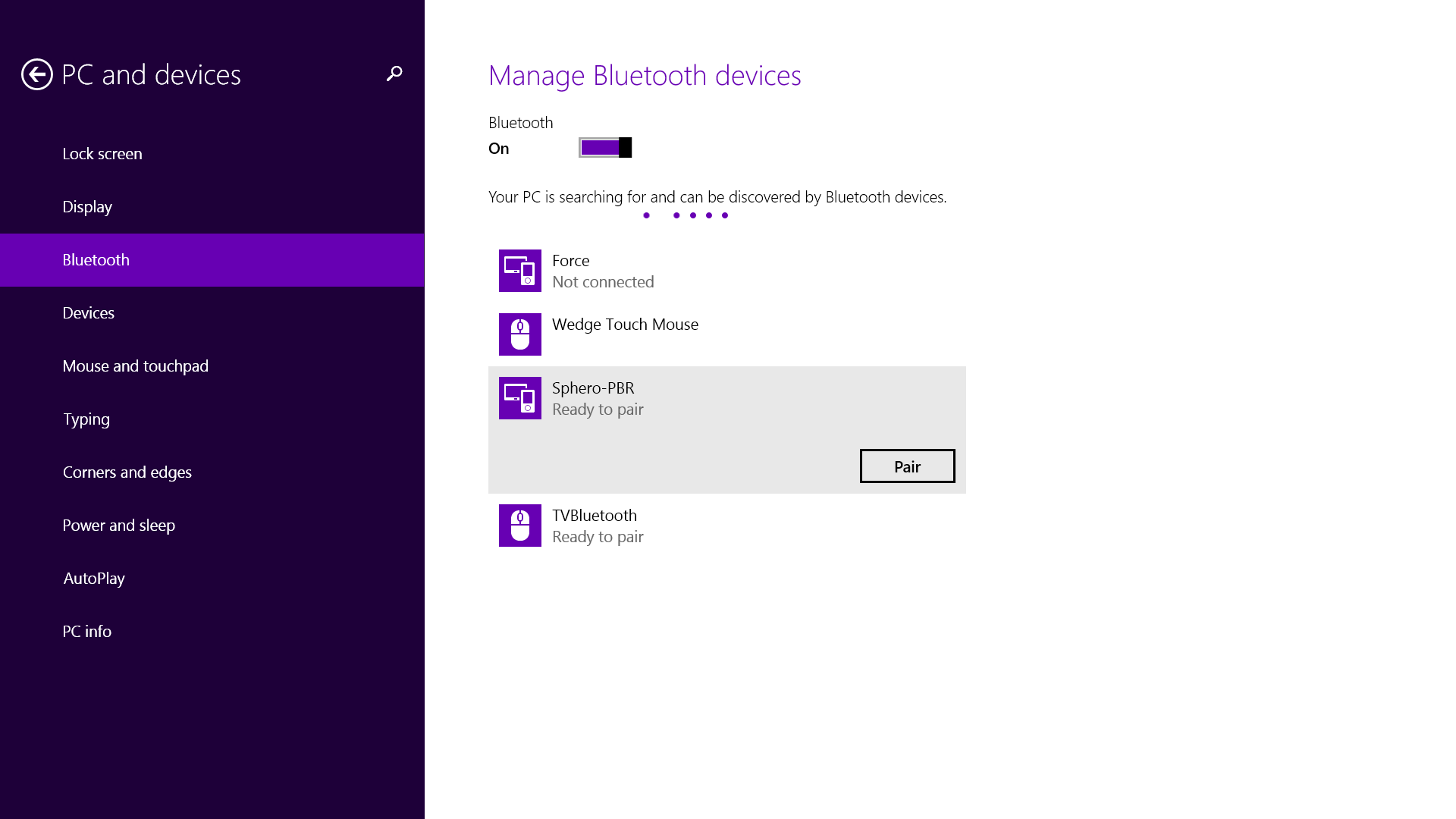
6. ब्लूटूथ के माध्यम से Sphero से कनेक्ट करें
7. एप्लिकेशन लॉन्च करें।
8. स्टार्ट बटन पर क्लिक करें और खेल को अभ्यास में देखें।

परिणाम
हमें एक साधारण खिलौना मिला। इसका उपयोग मल्टीप्लेयर रोबोट दौड़ की व्यवस्था करके, या पालतू जानवर के साथ खेलने के लिए किया जा सकता है।
कार्य का परिणाम वीडियो में देखा जा सकता है।
सूत्र यहां उपलब्ध हैं:
github.com/MissUFO/SpheroRaceउपयोगी लिंक
हम विंडोज 8. रोबो मैजिक बॉल पर रोबोट का प्रोग्राम करते हैंSphero आधिकारिक वेबसाइटस्फेरो डेवलपर सेंटरविंडोज 8.1 के लिए स्फेरो एसडीकेविंडोज 8.1 के लिए स्फेरो एसडीके उदाहरणविंडोज 8.1 में एक्सेलेरोमीटर का उदाहरणSphero youtube डेवलपर चैनलविजुअल स्टूडियो 2013 डाउनलोड करेंVisual Studio ऑनलाइन के बारे में अधिक जानें।Visual Studio ऑनलाइन के लिए साइन अप करें