नमस्कार दोस्तों! यह एक बार ऐसा हुआ कि एक चोट से उबरने के लिए मैंने खुद को ऐसा उपकरण खरीदा।

वह अपनी प्रत्यक्ष जिम्मेदारियों के साथ काफी संतोषजनक ढंग से सामना करता है, लेकिन एक "लेकिन" था, और यह इस तथ्य में शामिल था कि स्पीडोमीटर गवाही में भ्रमित था, और इसलिए, यात्रा की गई दूरी पर अलग परिणाम दिखाए। यदि आप धीरे-धीरे पर्याप्त जाते हैं, तो स्पीडोमीटर आमतौर पर चुप था। और आपका स्पीडोमीटर बनाने का फैसला किया गया ... ठीक है, आप समझते हैं।
सिम्युलेटर और कंप्यूटर को कैसे कनेक्ट करें
पहली चीज़ जो हमने शुरू करने का फैसला किया, वह था कंप्यूटर पर डेटा प्राप्त करने का तरीका खोजना। यह एक मध्यवर्ती लिंक के रूप में
Arduino बोर्ड का उपयोग करने का निर्णय लिया गया था।
क्यों
Arduino ? क्योंकि हाथ में कुछ और उपयुक्त नहीं है।
जांच करने पर पता चला कि दो तार सिम्युलेटर से सेंसर की तरफ जा रहे थे।

क्या यह
Arduino पिन से कनेक्ट करने के लिए पर्याप्त है। ऐसी स्कीम के अनुसार क्या किया गया
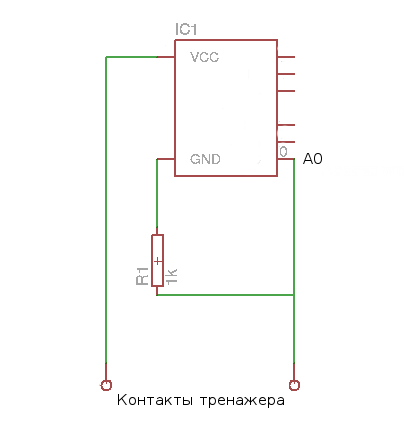
पैडल की स्थिति के आधार पर संपर्क
A0 , विभिन्न आकारों का संकेत प्राप्त करेगा।
प्रयोगों के दौरान, कंप्यूटर को माइक्रोकंट्रोलर से सिग्नल सप्लाई करने के कई विकल्प आजमाए गए, और आखिरकार इस विकल्प पर समझौता किया गया:
प्रतीक
"0" लगातार कंप्यूटर को खिलाया जाता है, फिर, जब सिम्युलेटर पर एक कदम उठाया जाता है, तो
"1" खिलाया जाता है। अगला चरण फिर से
"0" और इतने पर एक सर्कल में है।
मैं स्केच लाता हूंint pin = A0; int ledPin = 13; int minSignal = 600; bool stateUp = false; bool lastState = false; bool oneStep = false; void setup() { pinMode(pin, INPUT); pinMode(ledPin, OUTPUT); Serial.begin(9600); } void loop() { int signal = analogRead(pin); if (signal > minSignal){ stateUp = true; } else{ stateUp = false; } if (lastState != stateUp && lastState == false){ oneStep = not oneStep; } else { } lastState = stateUp; Serial.println(oneStep); digitalWrite(ledPin, oneStep);
खेल
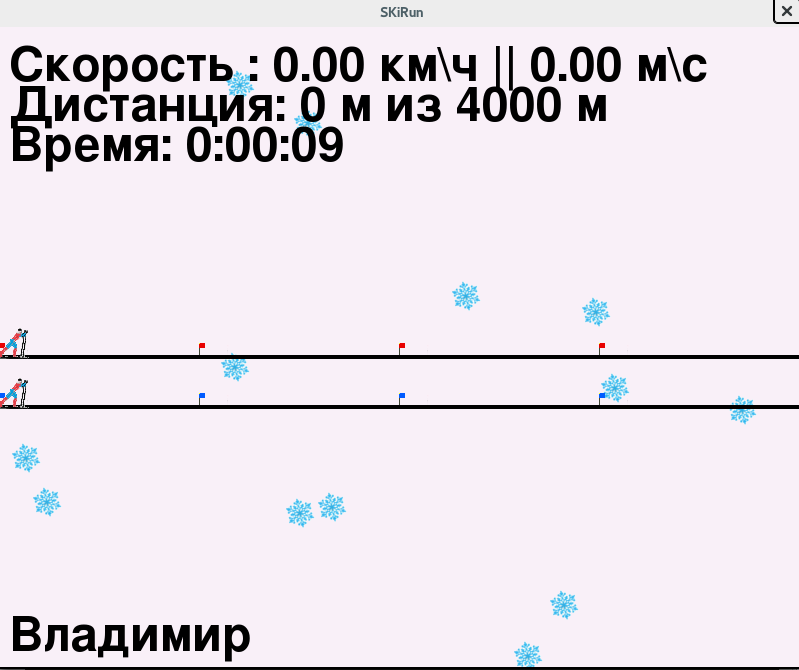
खेल नहीं तो pygame पर और क्या लिखें?विचार
एक अण्डाकार ट्रेनर स्कीइंग की नकल है, इसलिए यह स्कीयर की दौड़ होगी। सिम्युलेटर पर उठाया गया प्रत्येक कदम खेल में एक चरित्र बनाता है। सबसे पहले, मैं चरित्र की सहज गति / त्वरण बनाना चाहता था, लेकिन अंत में, मैंने सटीकता को वरीयता देने का फैसला किया।
बस्तियों
जाहिर है, यह पाया गया कि "इष्टतम" परिस्थितियों में, एक पूर्ण क्रांति 4 मीटर है। यह सबसे अधिक संभावना है कि कितने लोग गुजरते हैं, लेकिन केंद्रीय डिस्क कितना स्क्रॉल करती है। बस इस मूल्य को एक स्वयंसिद्ध के रूप में लें।
वर्चुअल ट्रैक पर, 1 मीटर 1 पिक्सेल के बराबर होता है। यानी प्रत्येक चरण में हम चरित्र 4 पिक्सेल को आगे बढ़ाते हैं।
गति हर कदम की गणना करेगी।
v =
s /
ts = 4 मी।
t एक कदम का समय है।
* एक कदम - पूर्ण पेडल रोटेशन।जोश
हां, टाइमर के साथ शेड्यूल और स्पीडोमीटर होगा, लेकिन मैं प्रतिस्पर्धा की भावना चाहता हूं।
लेकिन क्या होगा अगर आप किसी के साथ नहीं बल्कि खुद के साथ
कल का मुकाबला करें? जल्दी से नहीं कहा।
आज का चरित्र ऊपर है, कल एक नीचे है। अधिक सटीक होने के लिए - अंतिम दौड़ का चरित्र
लेकिन सहमत हूं कि पहला विकल्प कूलर लगता है।तकनीकी विवरण
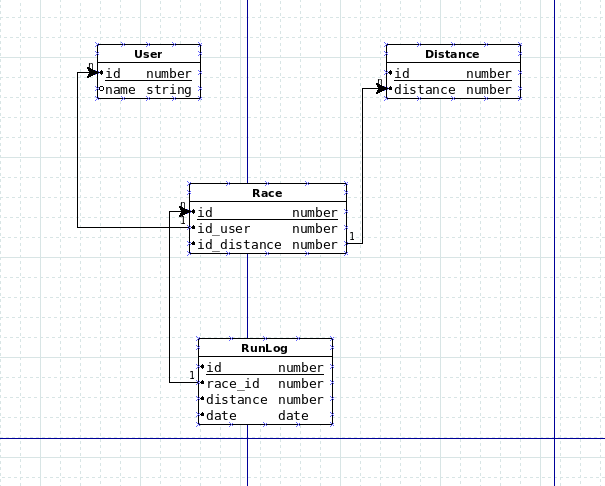
डेटाबेस
स्वाभाविक रूप से, चूंकि आपको दौड़ की जानकारी को बचाने की आवश्यकता है, इसलिए आपको एक डेटाबेस की आवश्यकता है। मैंने
mysql का उपयोग करने का निर्णय लिया।
अजगर में, मैं MySQLdb लाइब्रेरी का उपयोग करता
हूं । अनुप्रयोग में,
DataManger वर्ग सहभागिता के लिए जिम्मेदार है।
योजना जुड़ी।
कोड उदाहरण lass DataManager: def __init__(self): self.time = time self.currentTimeForLastRace = datetime.now() self.currentTime = self.time.time() self.speed = 0 self.db = MySQLdb.connect(host="localhost", user="root", passwd="root", db="skirunner", charset='utf8') self.cursor = self.db.cursor() self.isGetLastRaceSpeeds = False self.dataLastRace = [] self.lastRaceMinDate = datetime.now() self.value = 0 self.lastValue = 0 self.impulse = 0 self.isRaceStart = False self.currentRaceId = -1 self.currentDistanceId = -1 self.currentProfileId = -1 def getImpulse(self, value): self.impulse = 0 if self.time.time() - self.currentTime > RESET_SPEED_TIME: self.speed = 0 self.value = value if self.value != self.lastValue: time = self.time.time() - self.currentTime self.impulse = POWER_IMPULSE self.isRaceStart = True self.speed = STEP / time
ग्राफिक्स
जैसा कि आप ऊपर दिए गए स्क्रीनशॉट से देख सकते हैं, ग्राफिक्स आदिम हैं, लेकिन यह ऐसा नहीं है जो महत्वपूर्ण हो। इसके कार्यान्वयन के लिए,
pygame लाइब्रेरी का उपयोग किया गया था। उस काम के बारे में जिसके साथ मैंने
पहले ही लिखा था।
आकार
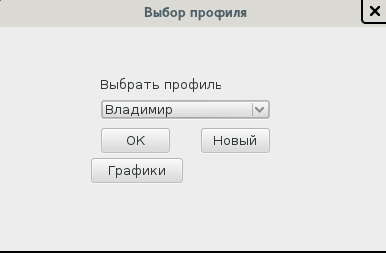 PyQt
PyQt लाइब्रेरी के लिए उपयोग किए जाने वाले रूपों के लिए।
कोड उदाहरण class FormProfile(QMainWindow): def __init__(self): super(QMainWindow, self).__init__() uic.loadUi('%s/ui/frm_profile.ui' % DIR, self) self.cb_profile_load() self.te_newProfile.hide() self.bt_addProfile.hide() self.bt_cancel.hide() self.lb_add.hide() self.move(QDesktopWidget().availableGeometry().center() - self.frameGeometry().center()) self.connect(self.bt_ok, SIGNAL("clicked()"), self.bt_ok_clicked) self.connect(self.bt_new, SIGNAL("clicked()"), self.bt_new_clicked) self.connect(self.bt_addProfile,SIGNAL("clicked()"), self.bt_addProfile_clicked) self.connect(self.bt_cancel, SIGNAL("clicked()"), self.bt_cancel_clicked) self.connect(self.bt_graph, SIGNAL("clicked()"), self.bt_graph_clicked) def bt_ok_clicked(self): self.profileId = self.cb_profile.itemData(self.cb_profile.currentIndex()).toString() self.formDistance = FormDistance(self.profileId) self.formDistance.show() self.hide()
मुझे वास्तव में खिड़की के विकास की प्रक्रिया पसंद आई।
एमएस स्टूडियो की तुलना में अधिक जटिल नहीं है।
क्यूटी 4 क्रिएटर एप्लिकेशन में बनाए गए फॉर्म।
उन्हें कोड में आयात किया।
uic.loadUi('%s/ui/frm_profile.ui' % DIR, self)
एसोसिएटेड इवेंट्स और तरीके
self.connect(self.bt_ok, SIGNAL("clicked()"), self.bt_ok_clicked) self.connect(self.bt_new, SIGNAL("clicked()"), self.bt_new_clicked) self.connect(self.bt_addProfile,SIGNAL("clicked()"), self.bt_addProfile_clicked) self.connect(self.bt_cancel, SIGNAL("clicked()"), self.bt_cancel_clicked) self.connect(self.bt_graph, SIGNAL("clicked()"), self.bt_graph_clicked)
और प्रदर्शित किया
self.formProfile = FormProfile() self.formProfile.show()
ग्राफिक्स
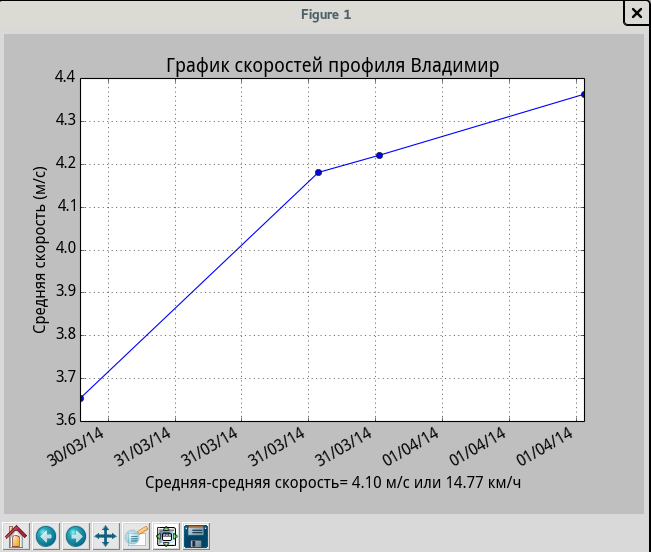
रेखांकन के लिए, matplotlib लाइब्रेरी का उपयोग किया जाता है।
यहाँ एक नमूना कोड भी है import matplotlib.pyplot as plt def bt_averageSpeed_clicked(self): ... plt.plot_date(dates, values,'b') plt.plot_date(dates, values,'bo') averageSpeed = len(values) > 0 and (lambda: sum(values) / len(values)) or (lambda: 0) plt.xlabel(u"- = %.2f / %.2f /" % (float(averageSpeed()),float(averageSpeed()) / 1000 * 3600)) plt.ylabel(u" (/)") plt.title(u" %s" % dm.getProfileNameById(self.profileId)) plt.gca().xaxis.set_major_formatter(mdates.DateFormatter('%d/%m/%y')) plt.gcf().autofmt_xdate() plt.grid(True) plt.show()
मैं यह नोट करना चाहूंगा कि सिरिलिक वर्णमाला प्रदर्शित करने के लिए, आपको सहायक फोंट कनेक्ट करने की आवश्यकता है।
from matplotlib import rc font = {'family': 'Droid Sans', 'weight': 'normal', 'size': 14} rc('font', **font)
Arduino के साथ डेटा पढ़ना
इस उद्देश्य के लिए मैंने
सीरियल लाइब्रेरी का उपयोग किया।
निम्नलिखित कोड एक अलग थ्रेड में चलता है।
def getDataFromSimulator(): global valueFromSimulator, isRunnig ser = serial.Serial('/dev/ttyACM0', 9600) while isRunnig: value = ser.readline() try: valueFromSimulator = int(value) except: pass
किसी अन्य थ्रेड में चर
मान फ़र्मसुमुलेटर का उपयोग केवल पढ़ने के लिए किया जाता है।
दौड़ते हुए दो धागे।
t1 = threading.Thread(target=main,args = (self.profileId,self.distanceId)) t2 = threading.Thread(target=getDataFromSimulator) t2.start() t1.start()
खराब वीडियो प्रदर्शन
जैसा आदेश दिया।
मुझे टिप्पणियों, आलोचनाओं और सुझावों पर खुशी होगी।यहाँ सभी स्रोत