हाय हमर!
मैं एक ऑल-टेरेन इलेक्ट्रिक व्हीलचेयर बनाने के लिए हमारी परियोजना के बारे में बात करना चाहता हूं। तकनीकी शब्दों में, यह सिर्फ एक घुमक्कड़ नहीं है, बल्कि एक वास्तविक रोबोट है, मैं एक परिवर्तित रोबोट भी कहूंगा।
यह घुमक्कड़ क्या होना चाहिए?
- अधिकांश विकलांग लोगों के पास कई घुमक्कड़ नहीं हो सकते हैं, इसलिए यह यथासंभव बहुमुखी होना चाहिए। ताकि घर पर, और सड़क पर, और जंगल में घूमना संभव हो, और ताकि आप स्वतंत्र रूप से सीढ़ियों पर चढ़ सकें और अंकुश लगा सकें। इसका मतलब दूसरा बिंदु भी है।
- घुमक्कड़ की चौड़ाई 650 मिमी से अधिक नहीं है, जिससे आप किसी भी उद्घाटन और लिफ्ट में कॉल कर सकते हैं। लंबाई 1100 मिमी से अधिक नहीं।
- सुरक्षित।
- सस्ते। मुझे लगता है कि टिप्पणियाँ यहाँ बेमानी हैं।
- बैटरी के रूप में ऊर्जा कुशल महंगे हैं।
मुख्य रूप से कार्डिनल रचनात्मक दृष्टिकोण की आवश्यकता होती है, सीढ़ियों पर चढ़ना। कार्यान्वयन के विकल्पों की एक बड़ी संख्या पर विचार किया गया था, साधारण बड़े-व्यास के पहियों से लेकर एक ट्रांसफॉर्मर व्हील तक एक गहरी चलने के साथ जो एक चलने वाले उपकरण में बदल जाता है। हर जगह समस्याएं थीं: कुछ समाधान सुरक्षित नहीं थे, कुछ विकल्प केवल एक प्रकार की सीढ़ियों (एक निश्चित ऊंचाई और एक कदम की गहराई), आदि के अनुकूल थे। सबसे अच्छा विकल्प एक कैटरपिलर मूवर था।
हमारा पहला कूल डूडम आइडिया
विचार इस प्रकार था: 4 गियर मोटर्स (चार पहिया ड्राइव), कुंडा कुर्सी, कुंडा पीछे मंच और 4 पुली पहियों के साथ तना हुआ ट्रैक। चरखी पहियों की विशेषता यह है कि एक सपाट सतह पर ट्रैक जमीन को नहीं छूता है और तदनुसार, कंपन और अतिरिक्त घर्षण पैदा नहीं करता है। घुमक्कड़ चरखी पहियों के रबर कुशन पर सवारी करता है। और एक बाधा को मारते समय, जैसे कि सीढ़ी, ट्रक इसी बाधा के साथ संलग्न होता है।
सीढ़ियों की चाल इस प्रकार है:
- टर्नटेबल को सीढ़ियों तक आसान पहुंच के लिए उतारा गया है।
- आगमन के बाद, रियर प्लेटफॉर्म मुख्य प्लेटफॉर्म के अनुरूप कम हो जाता है। इस प्रकार, कैटरपिलर बेस की कुल लंबाई एक तख्तापलट से अच्छा कर्षण और सुरक्षा प्रदान करती है।
- सीढ़ियों से बाहर निकलते समय, पीछे का प्लेटफ़ॉर्म अचानक गिरने से रोकने के लिए कम हो जाता है।
उठाने के दौरान, कुर्सी स्वचालित रूप से घूमती है, अपनी क्षैतिज स्थिति बनाए रखती है। सीढ़ियों से वंश बिल्कुल उसी तरह से होता है, लेकिन रिवर्स ऑर्डर में।
पहले प्रोटोटाइप का निर्माण
विचार का परीक्षण करने के लिए, हम एक प्रोटोटाइप बनाने के बारे में निर्धारित करते हैं। उन्होंने अब तक नियंत्रण इलेक्ट्रॉनिक्स का आविष्कार नहीं करने का फैसला किया, लेकिन अन्य इलेक्ट्रिक स्ट्रॉलर (जिनमें से प्रत्येक 2 इंजनों को नियंत्रित करता है) से 2 रिमोट का उपयोग करना है। तीन-स्थिति टॉगल स्विच का उपयोग करके कुर्सी और पीछे के मंच की ड्राइव को नियंत्रित किया गया था।
ट्रक बनाना पूरी तरह से एक और कहानी है। होममेड ट्रकों का आधार Impreza की टाइमिंग बेल्ट है। बेल्ट एक साथ सिले हुए हैं। वी-बेल्ट के खंडों को कटोरे के रूप में काट दिया गया था और स्व-टैपिंग शिकंजा के साथ सिल दिया गया था।

सामूहिक किसानों द्वारा रिसेप्शन का उपयोग किया गया था, क्योंकि सब कुछ अपनी जेब से वित्तपोषित था। ड्राइंग (चीन में भी) के अनुसार 4 ऐसे ट्रकों के निर्माण की लागत 70 हजार रूबल से शुरू होती है। (विनिर्माण टूलींग सहित)। परिणामस्वरूप, स्व-निर्मित ट्रक घुमक्कड़ के लिए एक यात्री के बिना सीढ़ियों पर चढ़ने के लिए पर्याप्त था। पेलोड से, जंक्शन पर ट्रैक टूट गया।
पहले प्रोटोटाइप के निर्माण में लगभग 80 हजार रूबल लगे, जिसमें एक गेराज कार्यशाला का किराया भी शामिल था।
परीक्षण के परिणामों के अनुसार, यह स्पष्ट हो गया:
- लग्स वाले ट्रैक पर आप सीढ़ियाँ चढ़ सकते हैं। भले ही कदम अलग-अलग आकार के हों और चिपके हों।
- कुंडा रियर प्लेटफॉर्म के साथ विचार काम करता है।
- चरखी पहिया डिजाइन विफलता के लिए बर्बाद है।
मुख्य समस्या यह है कि सीढ़ियों पर चढ़ने और एक सपाट सतह पर बढ़ने के लिए आपको मूलभूत रूप से अलग-अलग गति और क्षणों की आवश्यकता होती है, लगभग 10 बार। बेशक, आप अधिक से अधिक बिजली की ड्राइव स्थापित कर सकते हैं, फिर एक विमान पर चलते समय इंजन पर लोड नाममात्र की तुलना में काफी कम होगा, और सीढ़ियों पर चढ़ते समय, वोल्टेज नाममात्र (गति को कम करने के लिए) से कम है। इस परिदृश्य में, आप कम लागत और ऊर्जा दक्षता के बारे में भूल सकते हैं।
घुमक्कड़ - ट्रांसफार्मर।
इस समस्या को हल करने के लिए कई विकल्प थे:
- गियर शिफ्टिंग के साथ गियरबॉक्स बनाएं। अधिक सटीक रूप से, 4 गियर या कम से कम 2 (बाईं और दाईं ओर)।
- पटरियों और पहियों को अलग-अलग ड्राइव से घुमाएं।
- पहिएदार और ट्रैक किए गए आधार को अलग करें। इस मामले में, पहिया और ट्रैक को एकल ड्राइव द्वारा ट्रैक में कमी के साथ चलाया जाएगा।
घनिष्ठ विश्लेषण और गणना के बाद, यह पता चला कि बाद वाला विकल्प सबसे सस्ता और तकनीकी रूप से संभव है।
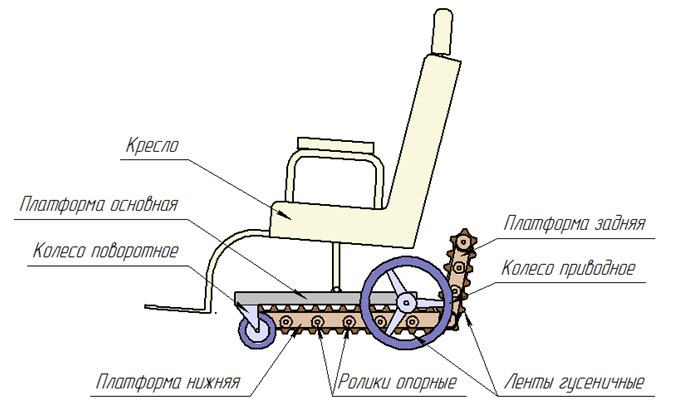
एक सपाट सतह पर, कैटरपिलर के आधार (निचले और पीछे) उच्चतम स्थिति में हैं और घुमक्कड़ के आंदोलन में हस्तक्षेप नहीं करते हैं। यदि बाधाओं को दूर करने के लिए आवश्यक है, तो निचले और पीछे के प्लेटफार्मों को कम किया जाता है, और घुमक्कड़ पटरियों पर खड़ा होता है। नतीजतन, इंजन शाफ्ट से ड्राइविंग ट्रैक चरखी और पहिया और चरखी व्यास में अंतर के कारण यांत्रिक संचरण के कारण, हमने गति और क्षणों में डिजाइन को दस गुना अंतर प्राप्त करने में कामयाब रहे।
लोहे में विचारों की प्राप्ति
इस बार उन्होंने प्रोटोटाइप के निर्माण के लिए और अधिक गहन तरीके से संपर्क किया: उन्होंने आवश्यक ट्रैक, सेलेस्टियल साम्राज्य में ड्राइव और खरीदे गए इलेक्ट्रॉनिक्स का आदेश दिया। नोवोसिबिर्स्क उद्यमों में मशीनिंग, लेजर कटिंग और झुकने का आदेश दिया गया था। विधानसभा और वेल्डिंग, ज़ाहिर है, खुद को बाहर किया। एक क्लासिक स्टार्टअप के रूप में सभी काम गैरेज वर्कशॉप में किए गए थे।
नियंत्रण प्रणाली में एक रिमोट कंट्रोल और एक कार्यकारी मॉड्यूल होता है, जो ब्लूटूथ के माध्यम से संचार करता है। एक वायरलेस रिमोट कंट्रोल विशेष रूप से आवश्यक है जब विकलांग व्यक्ति जॉयस्टिक को स्वयं नियंत्रित नहीं कर सकता है और साथ वाला व्यक्ति घुमक्कड़ को नियंत्रित करता है। सीढ़ी पर चढ़ते समय, परिचर को जॉयस्टिक के पीछे कुर्सी की बांह तक पहुंचने की आवश्यकता नहीं होती है, अपने हाथ में रिमोट कंट्रोल पकड़कर, वह नेत्रहीन रूप से आंदोलन को नियंत्रित करता है।
क्षैतिज कुर्सी को बनाए रखने के लिए स्वचालित प्रणाली एक एक्सेलेरोमीटर पर आधारित है। चूंकि सिस्टम अत्यधिक गतिशील नहीं है, आप बिना जाइरोस्कोप के कर सकते हैं और गणितीय गणनाओं को कम कर सकते हैं। निचले और पीछे के प्लेटफार्मों के निचले और उठाने के तंत्र पर प्रतिक्रिया सेंसर हैं। प्लेटफार्मों की स्थिति के बारे में जानकारी रिमोट कंट्रोल को प्रेषित की जाती है। सिस्टम 24 वी जेल बैटरी द्वारा संचालित है (हम भविष्य के संस्करणों में लिथियम-आयन का उपयोग करेंगे)।
परीक्षण एक ऊंची इमारत के कदम पर किए गए:
अभी भी हल करने के लिए पर्याप्त समस्याएं हैं। लेकिन एक बात सुनिश्चित है - यह काम करता है! प्लेटफॉर्म को कम करने वाले प्लेटफॉर्म के साथ पहिएदार कैटरपिलर प्रणाली के विकास के लिए एक पेटेंट आवेदन दायर किया गया है। हमारी आगे की कार्रवाइयों का उद्देश्य इलेक्ट्रॉनिक्स को अंतिम रूप देना, पटरियों पर पल बढ़ाना, सर्वश्रेष्ठ सगाई के लिए ट्रैक प्रोफाइल को बदलना और निश्चित रूप से, उत्पाद का एक प्रस्तुतिकरण बनाना है।
इस विकास के महत्व के विषय पर, हमने एक वीडियो शूट किया:
अब हम विकलांग व्यक्ति को आंदोलन की स्वतंत्रता दे सकते हैं। एक घर, एक दुकान, एक सिनेमा, एक दोस्त या प्रेमिका के लिए सीढ़ियों की उड़ानों के जोड़े की सीढ़ियां उन्हें केवल trifles प्रतीत होगी।