電気輸送のトピックは、すでにITコミュニティにとって新しいものではなくなりました。 ロシアの道路の電気自動車はまだ好奇心が強いですが、一部の馬鹿げた人々はすでに自分の手で
電動自転車を
集めています。 このレポートは電気自動車に関するものですが、主なハイライトはこれではまったくありません。 事実、イタリアの企業
VisLabは数年前に壮大なイベントの実装を開始しました。これは、ほぼ人間の介入なしに、従来の燃料をまったく使用せずに移動できる
自動制御電気自動車の 大陸横断集会です。 8月17日から19日まで、イタリアの代表団はモスクワで、8月18日にコスモスホテルの近くでデモを開催し、昨日8月19日に、集会のパートナーでありナビゲーション機器を提供した
トプコンポジショニングシステムズのモスクワ駐在員事務所でデモを開催しました。 このデモンストレーションに参加できたのは幸運でした。
まず、映画「I、Robot」を見て、上の写真でお世辞になった人たちを失望させたいと思います。 ステアリングホイールのない超高速スーパーカーはありません。すべてがはるかに控えめです。 電気的な
ピアジオポーターを備えた従来のイタリアの「マイクロカー」。ラベルで貼り付けられ、ワイヤーで結ばれています。 将来を見据えて-VisLabはまだ完全な自動制御を達成していません。 しかし、それでも車は非常に興味深いものであり、VisLabには見せるものがありました。

ハンサムですね

正面図、「トレーラー」にはセンサーと機器が取り付けられています。 以下は、外側と内側に追加でインストールされるすべての説明です。

フロントガラスの前の屋根に、約80 cmのステレオベース(左と右)を形成する
フロントカメラが配置されます。道路の凹凸、道路標示、および傾斜の可能性は、良好な道路を走行するときにステレオ画像によって追跡されます。 中央には、カメラ間で下向きの傾斜があり、
オフロードレーザースキャナーがあります。自動化は、
道路のないロシアの場所への
道路を走行する際に
オフロードレーザースキャナーに依存します。 ステレオカメラに似たタスクを実行しますが、バンプの検索により重点を置いています。 また、ガラスの下には
パノラマ画像取得システムがあります 。3台のカメラから写真がコンピューターで「接着」され、180度の水平視野を持つ正面図が得られます。 この写真は、坂道や急な曲がり角がある場合でも、「先頭の」車の位置を追跡します。

フロントバンパーには、さらに
3つのレーザースキャナーがあります 。 それらのうち:
- 2側面、同じ平面で作業 -地面に平行、視野は約240度(バンパーに設置されているため、実際に建設的な視野は270度)。
- 中央、4つの平面で作業し 、視野は約100度。
3つのスキャナーはすべて、車のすぐ近くにある障害物、固定障害物、歩行者、および他の車に関するデータを収集します。 中央のスキャナーの4つの非平行な作業面は、道路の斜面で作業する場合、こうしたシステムの不利な点を部分的に回避できます。急な上昇(または下降)の下部では、レーザーは路面に無用に置かれ、上部が空を照らします。 VisLabはこの問題を部分的に回避したと主張しており、中央スキャナーの作動距離は最大80メートルです。

屋根全体のほとんどが
太陽電池で占められており、そこから自動制御システム全体に電力が供給されます。 標準のバッテリーと電気モーターとは関係ありません。 これは、VisLabが標準の電気自動車システムに最小限の変更を加えることを望んでいたためです。 悪天候や夜間の運転のために、制御システムには独自のバックアップバッテリーがあります。 屋根の上のもう一つの興味深いこと:

Topcon Positioning Systemsロゴのある非常に便利なデバイスには、次のものが含まれます。
- 屋外ナビゲーション用の3システム(GPS、GLONASS、 Galileo 、GLONASS周波数:L1、L2、GPS:L1、L2、L5)ナビゲーション受信機 。
- 受信機からのデータがない場合のナビゲーション用の慣性センサーのセット 。
- 無線モデム
- おそらく他の何か、デバイスはプラグインによって拡張されています。

一部の情報源によると、碑文のない茶色のケースのデバイスは、マシンの1つにのみインストールされました。これは
、上記のトプコンと機能が似て
いるThalesナビゲーションシステムです。
残念ながら、詳細はありません。 UPD:詳細が登場しました。これはナビゲーションシステムではなく、
通信システム 、より正確にはアンテナです。 シェルフの下のトランクには、そのコントロールユニットがあります(下にはトランクの一般的なビューがあります)。

これは、
リアステレオカメラの 1つであり、VisLabのWebサイトで説明されていない「アンテナボックス」です。明らかに、これは別の
無線モデムです。 リアステレオカメラの機能は、フロントレーザースキャナーの機能とほぼ同じです-障害物検出。 背景の透明なボックスは、プラスチックケースによって雨から閉じられたコネクタを備えたジャンクションボックスです。

機械の側面図。 プロジェクトに参加した組織の数を確認できます。 また、
2つのアウトレットに気付くことができます。 1つの標準として、それを介してエンジンにバッテリーを充電します。

また、VisLabが提供するこのアウトレットは、システムのセットアップおよびデバッグ時に「自動ドライバー」に電力を供給するために使用されます。

RJ-45コネクターはソケットの隣に見えます-これは通常の
ギガビットイーサネットポートで、オンボードコンピューターネットワークの「外の世界」への高速接続に使用できます。
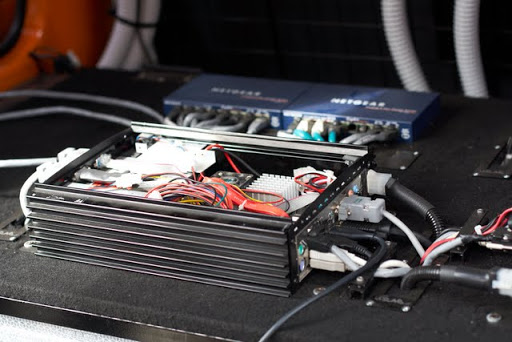
さて、おそらく、Habraの人々にとって最も興味深いのは、システムの「頭脳」です。

オンボードネットワークのスキーム。システムには
3つの 「頭脳」が存在することが明らかです。これらは
3つのCarPCであり 、それぞれが独自のタスクに関与しています。 写真にあるように、コンピューターの構成に関するデータはあまりありません。Kingston64-GB SSDが使用されています。 SSDは、速度だけでなく、振動にも反応しないため、CarPCの最適なオプションです。 写真では見えないものからは見えますが、なんとか見ることができます-Socket 478プロセッサソケットはマザーボードにあります。ヒートシンクはかなり控えめであるため、これらのコンピュータで使用されているプロセッサを特定するのは困難です。 明らかにIntel Atomではなく、おそらくVIA TechnologiesのC7ではありません。
 最初のPC "brown1"
最初のPC "brown1"は、プロットと直接運転に従事しています。 X-BY-WIREシステムはそれに接続され、それは
Drive-by-Wireでもあり
ます 。 実際には、サーボモーターを使用したワイヤーによる自動車制御システム。 また、航法受信機、慣性センサーシステム、その他のトプコンおよびタレスの機器は、かなりの数のCOMポートに接続されています。
 2台目のPC「brown2」
2台目のPC「brown2」は、フロントガラス上の3台のカメラからのパノラマ画像を「接着」して処理し、バンパーのフロントレーザースキャナーを使用して障害物を検出します。 ビデオカメラはIEEE1394を介してこのコンピューターに接続され、スキャナーは一般的なオンボードイーサネットネットワークに含まれています。
 3台目のPCである「brown3」
3台目のPCである「brown3」は、4台目のスキャナー(屋根にあるもの)と4台のカメラで道路の状態を追跡します。 。 また、後方ステレオイメージングは、後方から障害物を検出します。 Firewireを介して、4台のカメラが屋根からこのコンピューターに直接接続されています。
 太陽電池バックアップ充電コントローラー
太陽電池バックアップ充電コントローラー 。 バッテリー自体は、明らかに、すべてのコンピューターがインストールされているボックスにあります。

コントローラーの近くに、何らかの理由で、識別マークのないコミュニケーターが接続され、brown1に接続されました。 キーで判断-Android OSを内部に搭載。 コメントで示唆されているように-これはNexus Oneです。 任命は私にとって謎のままでした-デモンストレーション全体を通して、イタリア人は決してそれをつけませんでした。 SovGVD
habrayuzerのおかげで、コミュニケーターの目的もわかりました。これは
、二酸化炭素濃度に関する情報を収集するためのIBMシステムであり 、それについては以下で説明します。

スキャナーとコンピューターはギガビットネットワークで接続されているため、これらは通常のギガビットスイッチであり、職場や自宅で読んでいる人の一部でさえ同じかもしれません。
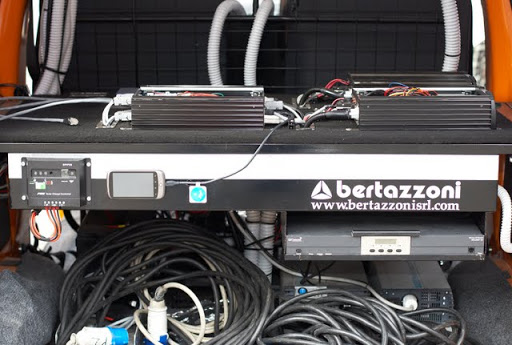
トランクが開いている一般的なビューは、システム管理者の心を温めます。 右側の棚の下には、Thales通信システムのコントロールユニットがあります。
もちろん、動いている車を見るのは面白いです。 残念ながら、高品質のビデオカメラは持っていません。コミュニケーターだけがいました。 したがって、最初に説明、次に写真、そして控えめな短いビデオの順になります。
したがって、実行の詳細:
合計4台の車があり 、そのうち
2台がメインで 、
2台がバックアップです。 デモンストレーションには3人しか出席していませんでしたが、1人のイタリア人がどこかに行きました。 繰り返しますが、2台の「マイクロカー」が直接実証されました。 さらに、システムのセットアップ、修理、予期しない状況などの場合、実行後にトレーラーのストリング全体を実行する必要があります。 しかし、トレーラーはデモンストレーションに参加しなかったため、特別なことは何もありません。
すべての電気自動車には同じ機器があります(電気通信システムを除く-茶色のケースにあるものは、ホスト車の単一コピーに存在します)。
すでに述べたように、2台のマシンの役割は異なります。最初の
「リーダー」はほとんど自動的に移動しますが、場合によっては管理に介入する必要があります。 意図したコースからの逸脱が時々発生し、さまざまな予期しない状況が発生します。 また、最初のマシンは旅行中にデータを収集し、スキャナーとカメラ、意思決定システム、制御システムでさまざまな実験を行います。
脳損傷が追加されたように、ルートに沿ってマシンはCO
2のレベルを測定し、
Twitterに投稿します2番目の
「スレーブ」マシンは、コンピューターによって100%制御され、人が制御に介入することはありません。 システムは常に改良されており、バグは修正されています。VisLabによると、このようなマシンは、実行後にファジーなルートに沿って完全に自動的に移動できます。 このようなプロトタイプで作成された電気自動車は、交通量の多い市内中心部の条件での輸送に使用できます。
車はミラノから上海に向かいます。走行の大部分はロシア領土を通過します。 サイトには日付ごと
に主要な停車地の
スケジュールがあり 、8月22日には車がNiNoにあり、その後ロシアの都市、サラトフからケメロヴォにさらに多くの停車地があります。
さて、動いているいくつかの写真:
 車
車 、マスターとスレーブの
両方 。 この時点でのマスターは、手動モードで制御され、通常のように自動的に駆動されます。
 先行車が
先行車が大きくなっています。
 スレーブ
スレーブ 、自動モード。


「どうすればいいの!」
Youtubeのビデオ、自動モードの両方の車:
結論として、未来のこの作品を作成したVisLab(前世紀の90年代から似たようなことをしてきましたが)と匿名のままにしておきたい、イベントに電話してくれた友人に感謝します。
誰かが質問がある場合-コメントを書いて、私は答えようとします。 さらに、実行サイトとVisLabサイト(記事の冒頭にあるリンク)には、多くの英語の情報があります。 このサイトで最も興味深いのは、ホストマシンのカメラの
画像をリアルタイムで
観察できることです。 確かに、放送は、残念なことに、技術的な問題のために定期的に落ちますが、時には機能します。
UPD:Habréにはこのテーマに関する資料
が既にありましたが 、非常に短く、詳細がありませんでした。
動いている車に関する別の
レポートがありました、興味深いビデオがあります。