パート1 |
パート2 |
パート3 | パート4
前のパートで説明したナポレオンの計画は、私の手ではなく、2、3人の貧弱な力によって実際には実現不可能であることが判明しました。 したがって、本
ReWorkの賢明な考えの1つに触発されて、私はまだフライングマシンを組み立てることに決めました。 今回はできるだけ早く、最小限の労力で。
しかし、そこにありました。
詳細
膨大な数の既成プロジェクト
の中で、特にロシア語を話す
マルチコプターファンのコミュニティの創立者であり、インスピレーションを与えているアンドレイが
ドイツに立ち寄ったことを考えると、
ドイツが一番好きでした。 他にどのような詳細が必要になるか、前のパートでおおよそ説明しました。 詳細を追加して、すべてをまとめましょう。
1.部品の場所と数に応じて、価格は概算です。
2.デバイスに必要なモーターの数と、1つまたは2つの予備のモーターに応じて。
3.容量と、余分なパンを異なります。 正しく理解できれば、追加のV2.0コントローラーパンは必要ありません。ファームウェアとMOSFETを交換することにより、V1.2の電力を増やすことができます。
4. PPMコンバーターを購入またははんだ付けする必要があります。 別の送信機がありますが、利用できません。
*-オプションのアイテム。
合計:1415 $ - $ 1905。まだお金がある場合は、
磁気センサー 、
ナビゲーションボード 、
GPS (90ドル+ 170ドル+ 112ドル)のナビゲーションモジュールを購入できます。 実際、価格の上限は事実上無制限です。 頑丈なカーボンファイバーハウジング、20馬力の
3キログラムモーターを注文し、100 kgを空中に持ち上げることができるマルチコプターをリベットすることができます。
そのため、詳細が無事に到着したと仮定します(ああ、かつてそうではなかった!通関手続きがなくてもいい)。 アセンブリを開始しましょう。 さらなる資料は、特に個々の部品や
アセンブリに関する膨大な記事を掲載しているAndreiのWebサイトに密接に反映されます。
カメラフレームとサスペンション
古典的な丸皿と四角い部分が気に入らなかったので、アルミ板(厚さ1.5-2.5 mm、価格900ドルあたり5ドル、はい、少し汚れている)、アルミパイプ(外径10 mm、壁厚1 mm、価格2 mあたり4ドル)、紙とファンタジー。
モーターコントローラーのアダプターボードとモーターのマウントを測定し、何らかの理由でコンパスに描画します。
支持パイプへのモーターの固定は非常に簡単であるという事実にもかかわらず、私はかなり汗をかかなければなりませんでした。

パイプに穴をドリルすることも困難であるチューブに厳密に垂直です。 これを行うには、私が見つけられなかった特別なデバイスを入手するためにどこかが必要なので、曲がって判明しました。 この観点から、正方形の断面のアルミニウムプロファイルを使用する方がより正しいでしょうが、丸パイプは振動をより良く減衰させると噂されています。
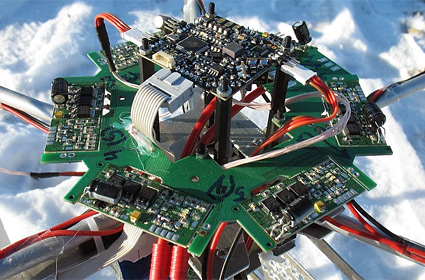
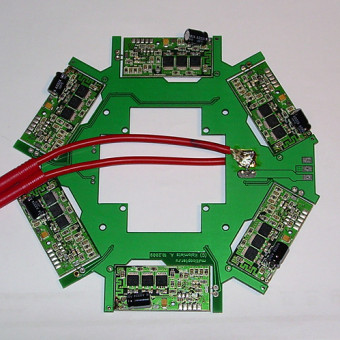
私の著者の中心プレートであるパイプは、2つのそのようなプレートとミクロポアガスケットの間に取り付けられています。

フレームアセンブリの一部。 モーターと重量700グラム、ならびに減衰大きな振動。

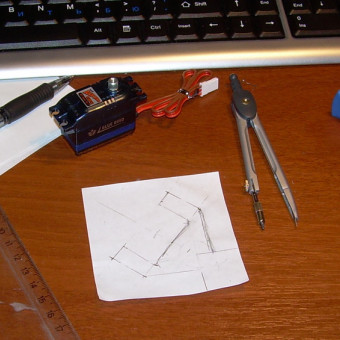
数週間の切断とキログラムのチップから私が学んだ非常に重要な教訓:「膝の上で」そのようなことは行われないので、プロの機器を探す必要があります。 さて、または私はちょうどお尻から手があります。 この考えと並行して、長い間、金属から描画するものすべてをレーザー切断するオフィスがあり、比較的安価に(緯度で1メートルあたり4.3ドル)という情報がありました。 インスピレーションを受けて、他の詳細と一緒にカットするカメラのサスペンションの「パターン」を見つけました。
AutoCADでの描画は非常に便利でエキサイティングなものでしたが、エンジニアリングCADがこれ以上優れているとは思いません。 しかし、私は失望しました。オフィスでは、レーザーが1.5 mmより厚いジュラルミンの摂取を停止しました。 そして、このジュラルミンを感じることによる感覚によると、1.5ミリメートルは明らかに十分ではありませんでした。 私は自分自身で、そしてペンでもう一度しなければなりませんでした


フレームのバージョンを設計するときは、すべてのコンポーネントのアタッチメントポイントをすぐに提供する必要があります。そうしないと、コンポーネントが横に出てしまい、どこでもパーツを彫刻する必要があります。
- 支持パイプの固定 。 上の写真のように、1本のパイプをそのまま残し、残りの部分を2箇所のボルトでプレートに2 cmの距離で固定します。
- メインボードの取り付け 。 それが判明したように、それはとにかく置くことができませんが、 いくつかの方法でのみ
- カメラマウントの取り付け 。 厚いガーデンホースのセクションにカメラマウントプレートをぶら下げて、顕著な振動保護を実現。
- バッテリーマウント。 幸運なことに、バッテリーをカメラのサスペンションに取り付けることができました。 以前の記事へのコメントで、彼らはステディカムを負荷の代わりにバッテリーを持つサスペンションとして作ることを提案しました。
- モデムと受信機を取り付けます。 私はそれらを忘れてしまったので、粘着テープで直接支持パイプに巻き上げなければなりませんでした。 これらのボードの重量はほとんどないので、見た目はあまり美しくありませんが、非常に信頼できます。
- 「脚」をマウントします。 また、脚を支持パイプに再び固定することは悪い考えなので、彼について覚えておく必要がありました。
カメラの停止についての詳細。 私は通常のサスペンションを作ることができませんでした、私はかなり大きな遊びで巨大なデザインを得ました。 サーボはこのサスペンションを動かすのに十分な力を持っていないので、無負荷でもぐらつくように傾いています。 ギアボックスを使用する必要があります。 そして、一般的に、これはデバイスの最も難しい部分であり、プロの機器で慎重に設計および製造する必要があります。
フレームの詳細について
は、 Andreiの
Webサイトと フォーラムを ご覧 ください 。 それは素晴らしいアイデアの多くは、彼らはただ見てする必要があり、このフォーラムで、注意すべきです。
モーターコントローラー
すべての情報を
ここで詳しく説明します。2色のワイヤを購入し、h-h-h-h-hの組み合わせを順番にはんだ付けしてから、1色をモーターの白と黒のワイヤにはんだ付けすると非常に便利だったことを付け加えます。そして別の赤。 この場合、モーターは1つを介して反対方向に回転します。 ただし、モーターが正しい方向に回転しているかどうかを確認するまで、急いで収縮チューブを加熱しないでください。 モーターが他の方向に回転するには、2本のワイヤを交換するだけで十分です。
最初に、6つのコントローラーを分電盤にはんだ付けします(ただし、これは必要ありませんが、コントローラーをモーターの近くに配置できますが、コントローラーをマウントする必要があります)、12AWGワイヤーの対応する接触パッド(バッテリーコネクタ、極性を確認)、およびコントローラーの出力16AWGワイヤ。 現時点では、アドレス領域は変更されていません。

メインボード
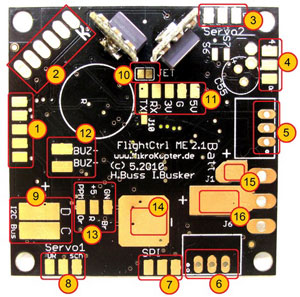
メインボードに、サーボ用コネクタ(3,4,8)とコンピューター(1)の通信、電源線(すでに配電盤、14および16から)、配電盤と受信機につながるi2cバス(9)をはんだ付けする必要があります(13 、または11)。 詳細は
こちらと
こちら 。 そしてまだ、
受信機について 。 メインボードと一緒に、私はすぐにラジオを買って、それは非常に便利です。 これらは、
このマニュアルまたは
このマニュアルに従ってはんだ付けし、正確に調整する必要があります。
組立調整
実際、クワッドコプターはほとんど準備ができています。 フレーム、分電盤、メインボードを組み立て、無線モデム、バッテリー、および受信機を取り付ける必要があります。 この設定は、AndreiのWebサイトで
ここと
ここで顕著に説明されているため、このマニュアルを再度書き直す必要はありません。



足は絶対に恐ろしいものから作られなければなりませんでしたが、これは重要ではありません。 その結果、特に信頼できるものではなかったデザインが出てきましたが、テストではよく表れています。
テスト
実り多い作業と間違ってはんだ付けされたワイヤのはんだ付けの数か月後、「Ch」の時間が来ました。 比較的穏やかで冷ややかな朝は、ほぼ二千ドルを捨てる素晴らしい日です。




飛行機械を習慣から制御することは非常に困難です。 特に、曲がって組み立てられており、自動操縦で対応する係数が設定されていない場合。 テストは、マルチコプターを取り付けた状態で実行するか、少なくとも高度制御をオンにする必要がありましたが、それを忘れていました。 その結果、デバイスは空に舞い上がり、そこからテストのためにテストを始めていた通行人によって運ばれました。 この時までに、船内ボードがどちらの方向を向いているかを完全に理解できず、デバイスを静かに植えることができませんでした。 しかし、私は再び幸運でしたが、損傷はわずかであることが判明しました。1本のキャリアパイプが破損し、マルチコプターの脚部、およびほぼすべてのプロペラが打ち負かされました。


ここで、フレームを少しやり直して、保護フレーム、脚などを提供する必要があります。その後、さらにいくつかのテストを行いますが、今回はさらに注意が必要です。 さらに、カメラのサスペンションの問題は未解決のままです。
やや面倒でくしゃくしゃになったプレゼンテーションスタイルについて謝罪します。最終的に、ほとんどの情報は他のサイトで詳細に説明されており、自分の「成果」は自分の間違いを修正する可能性が高く、注目に値しません。
航空会社をご利用いただきありがとうございます。