すべての最高、habrauserov。 はい、ロボットを作りました。
私は、MSTUの「未来へのステップ」のようなトレンドを広めるために、この投稿を書いています。 N.E.バウマン、結局のところ、私たちは皆、十分な学童と、ハブラハブラの現代教育に興味がある人がいることを知っています。
「ステップ・トゥ・
ザ・フューチャー」は、高校生(10代および11代)向けのオリンピアードで、賢く、科学活動に従事する準備ができています。
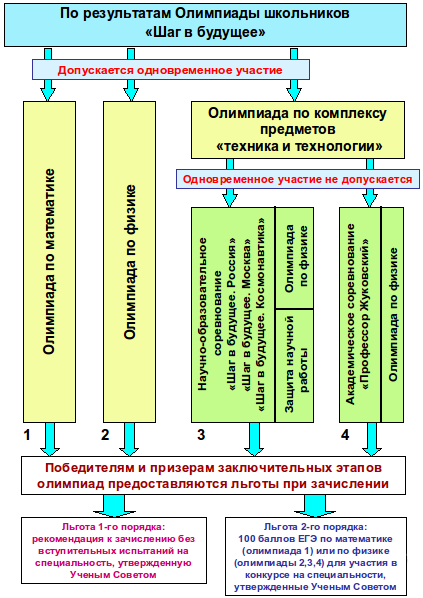
次の2つのステージで構成されます。
- 委員会の前にプロジェクトとその保護に取り組みます
- 物理学でオリンピアードを書く
最初の部分の結果(つまり、保護のために受け取るポイント数)に基づいて、参加者は2番目の段階まで許可されるか、除外されます。
それは短い余談でした。 次に、すべての手順を直接行った方法を説明します。
まず、MSTUのLyceumで勉強しました。 N.E.バウマン2年間。 はい、彼らは私たちを助けましたが、彼らはそのようなオリンピアードがあり、それの助けを借りてあなたが大学に行くことができるという情報を助けました。 私は13歳の頃からプログラミングを行ってきましたが、現在はいずれかの会社で働いています。
まず第一に、私は主要な教育施設の354号室に行きました。 そこで彼は、私がそのような、そしてそのような、そしてそのような学部のそのような部門が欲しい情報を残しました。 すべてがシンプルです。
2か月後、プロジェクトの注釈を提出する必要がありました。 この時点で、参加者は既にスーパーバイザーから連絡を受けているはずであり、実際に参加者はプロジェクトに参加しています(私はすべて自分でやりました)。 私は科学者にメールで手紙を書き、最後にプロジェクトのトピックを決めました(Habrのおかげです)。 Arduinoをベースにしたロボットを作るという結論に達しました。なぜなら、それはクールで壮観だからです。
だから、私はすでにebayで
arduino duemilanoveを注文し、ロシアの郵便のおかげで何年も後にそれを受け取りました。 良いもの。 LEDをオン/オフするプログラムを作成しようとしました。 まあ、クール。 次は?
それから、私はこのボードで次に何をすべきかを絶対に知りませんでした。 ebayで検索すると、mr wheeledプラットフォームが見つかりました。 基本。

はい、突然メールで受け取りました。 中国の役に立たないプラットフォーム。 最終的に、すべてのギアが磨耗し、彼女は乗り心地が悪くなり始めました。 別のものを注文しなければなりませんでした。

ミスター モーターの動きにはまったく電流がなかったので、トランジスタを介して長い間、そして頑固にArduinoに基本を接続しようとしました(私の回路を少し理解し始めたにもかかわらず、彼のおかげで私の科学のインストラクターは私に促しました)。 しかし、力はまだ十分ではありませんでした。 次に、arduinoのモーターシールドをグーグルで検索しました。これを使用して、サーボとモーターを接続できます。 さらに、シールドにはarduino IDE専用のクラスがあります。 とても助かりました。 接続は簡単で、コードの記述も簡単です。 これでモーターが作動しました。
モーターを制御するには、独自のソフトウェアを作成する必要がありました。 Qtを選びました。 4つの矢印がある単純なプログラムが作成されました。 を押すと、com-portを介してボード自体にデータ配列が送信されました。 配列には、右モーターの方向、右モーターの速度、左モーターの方向、左モーターの速度が含まれていました。
すべてがワイヤを介して正常に機能しました。 今、私は無線モジュールを探し始めました。 APC 220が見つかりました。

私はebayでそれらを注文しました。 中国の売り手は、1つのモジュールでコンピューターからarduinoを制御できることを保証しました。 私は若くて緑があり、長い間壊れましたが、彼の忍耐力を信じていました。 そして、突然! もちろん、2つのモジュールが必要でした。 一般的に、私から利益を得た。 彼は2番目のモジュールを間違ったモジュールに送った(そして私はそれを燃やした)、私はモスクワを見なければならなかった。
APC 220は接続するのが非常に難しく、ドキュメントもありません。接続するために1週間苦労しました。
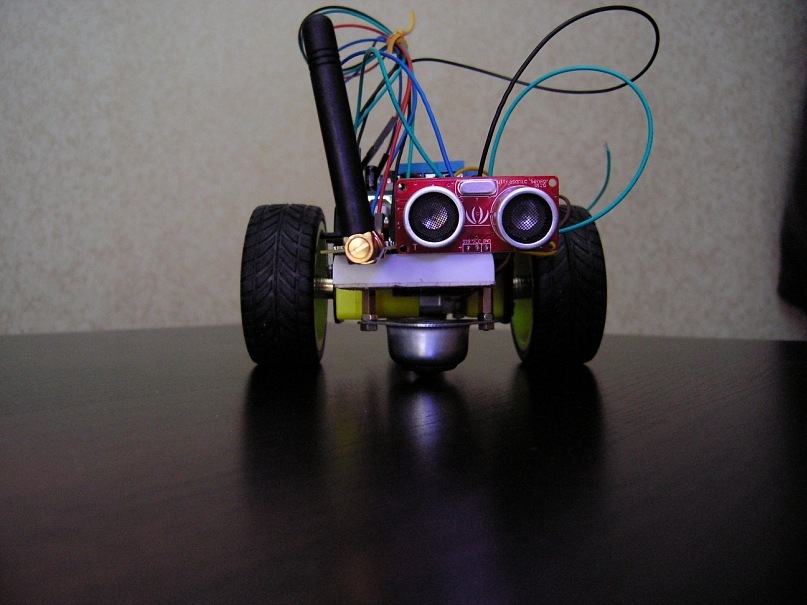
さらに、私は十分ではなかったので、超音波距離計を次のものに接続することにしました。
- 最初の障害物までの距離を決定する
- このような高価な機器を損傷しないように、この障害物の前で自動的に停止します。

このモジュールの情報と、一般的には自分自身について、イリヤ・ダニロフ(idanilov.ru)に感謝します。 彼はセットアップと接続で私を大いに助けてくれました。
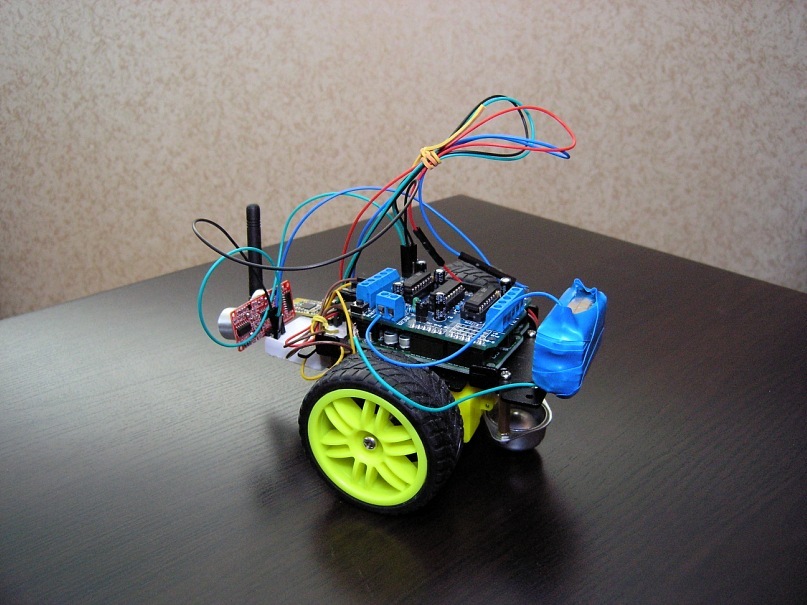
その結果、PCを介して無線で制御されるこのようなロボットを得ました。
2月に、ロボットの開発の段階を説明する防衛のための要約を提出する必要がありました。 20ページになりました。彼はレビューされ、得点もされました。 3月にはすでに防衛が進行中であり、その結果、彼らは物理オリンピックに参加することを認められました。 5月に、オリンピアードの勝者と受賞者が決定されました。 今年、MGTUは受賞者と受賞者の両方を受賞しました。
現在、私はすでにMSTUのソフトウェア工学科の学生です。 N.E.バウマン。 ご清聴ありがとうございました。