ユニットを制御したり、これらのユニットから情報を収集したりするために、何らかの電子デバイスを迅速に開発する必要がある場合があります。 このタスクには、Arduinoのような既製のデバイス、またはマイクロコントローラーに基づいた独自設計のハードウェアのいずれかが理想的です。 この記事では、このようなデバイスの中心となる小さな自家製ボードを検討することにしました。

写真は、プログラマーに接続されたデバイス(左)(右)を示しています
そのため、このような鉄片を作成するには、
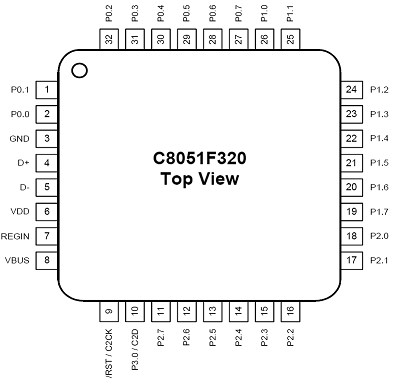
Silicon Labs C8051F320マイクロコントローラー 、いくつかのSMD抵抗器とコンデンサ、タイプAコネクタ付きのUSBケーブル、はんだごて、およびストレートアームが必要です。
マイクロコントローラーの説明から始めましょう。 このMKには、PCに接続できるUSBコントローラーが含まれており、総消費量が400mAを超えない場合、USBから回路に電力を供給できます。10ビットADC、約20の入出力ポート、統合クロックジェネレーター、および組み込みデバッガー、ファームウェアのデバッグが簡単になります。 MKにはSMDフォームファクターがあり、条件付き画像が図に示されています。
MKを使用するには、必要なエレメントを備えたボードにMKを吊り下げ、電源を接続し、入力/出力ポートの脚をデバイスの外側に持ってくる必要があります。 このようにしてみましょう:
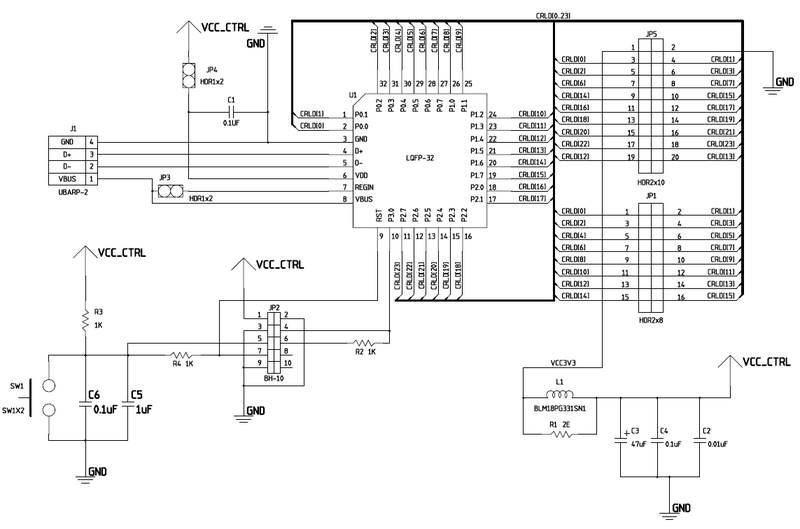
J1コネクタ-USBタイプAコネクタ。JP3ジャンパは、デバイスの電源をUSBからJP4を介して接続された外部ソースに切り替えます。 USB電源の場合は、JP3ジャンパーを閉じる必要があり、外部電源の場合は、JP4を閉じてジャンパーを開きます。 ボタンSW1は、デバイスの「リセット」を実行します。 ファームウェアを再起動します。
JP2コネクタ-
プログラマコネクタ、それを通してファームウェアとデバッグファームウェアMK。 I / OポートP0〜P2は、JP5とJP1の2つのコネクタを介してルーティングされます。
回線に使用される要素のリスト:

したがって、これらはすべて回路基板に配置する必要があります。 すべての要素はSMDボード上にあるため、スペースを節約するためにボードの両側に配置します。 残念ながら、ボード自体の配線は私にとっては失われましたが、さまざまな方法で配線できるため、これは問題ではありません。 これが私の場合に起こったことです。
条件付きボード画像:

画像からわかるように、スカーフは非常に小さいことが判明しました。これは非常に便利です。USBポートに固定しておけば作業できます。 便宜上、ボードにはんだ付けされた静的USBポートの代わりに、USBケーブルが使用され、サイドBから切り離され、コネクタの代わりにはんだ付けされました。
ボードの裏側:

ボードの前面:

USBケーブルが写真で少し引きちぎられ、ボードが横になって1か月後に箱から出てしまったことをおIびします。
適切な鉄の部品が見つかりました。これにより、コンピューターからリモートデバイスを操作したり、内蔵ADCなどを使用してパラメーターを測定したりできます。