長い間、私はそのようなバグを小さなサイズに積み上げて、本物のようにクロールし、同時に食べ物を求めずに太陽から食べました。
私は何と言うことができます。
マイクロロボットがあり
ます 。 純粋な機構により、昆虫の動きを模倣する
ワイヤーロボットがあります。
太陽光発電ロボットがあります。
まあ、それですべて一緒に?
すべてを絶対に達成することはできませんでしたが、そのようなロボットを作る試みは間違いなく成功でした。
基礎は、中国製の製品-「世界最小の太陽光発電機」、「中国の目覚まし時計」、 およびロシア製の製品-ペーパークリップ。

1.デザインは
roboforum.ruで調査され
ました 。 そして彼らは、チェコのサイトでビームロボットについてそれをスパイしたと言っています。 それは私が得たものです。

カブトムシの各脚の一端はクランクシャフトに取り付けられ、もう一方の脚はロボットの骨格に設けられた穴にねじ込まれています。 シャフトが回転しています-バグは運指です。
2. TTXコンポーネント。
a)ソーラーパネル。 0.5V 0.06-0.12A
b)エンジン-不明なマーキング。 タイプライターから撮影。 私の推定によると、0.5Vの電圧と0.12Aの電流強度で2000rpmを生成します。
c)中国の目覚まし時計が解体され、ギアから1:40ギアボックスが組み立てられました。
3.ペーパークリップのはんだ付け方法。
a)1本のワイヤーをもう1本のワイヤーに巻き付けます。
b)少量のロジンを入れ、ジョイントに溶かします。
c)接合はんだに寄りかかります。
d)少量のはんだが吸収されるまで、反対側の接合部を温めます。
4.ソーラーパネルの特徴。
冬の太陽のバグをチェックしました。 光線が90に近い角度で落ちるように傾けると、カブトムシがcreepい上がります。
通常の白熱灯によって良好な照明が提供されました。ランプをロボットに持ち込むと、ハムが鳴り始めます。
ロボットの最初のバージョンはギアボックスなしで組み立てられました-私はただ光から足をぐらつくことができる何かをしたかったです。 いくつかの試みで、私はなんとかこれを達成することができました、そして、それは起こりました。
カブトムシは非常に素早く指で触れましたが、力はその重量を引きずり、構造内の摩擦に抵抗するには十分ではありませんでした。 減速するためにギアボックスを作成する必要がありましたが、シャフトのトルクは増加しました。
試行錯誤を繰り返し、いくつかのギアを台無しにし、さらに夜を過ごすことで、私はまだ新しいバージョンのロボットを組み立てました。

そして彼はHeいました!
私はそこで止めたくありませんでした。バグは「人間の」外観に裏切られました。
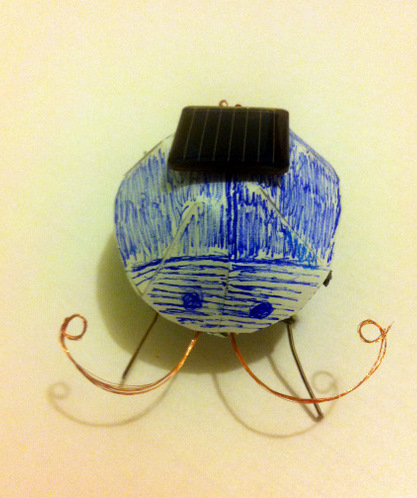
そして、人間の名前を与えられた-アントシュカ。