
もちろん、GPSフライトやその他のグッズについての第3部を書くことを約束したことを覚えていますが、ヘリコプターの分野ではなく、息子、はんだごて、Arduino IDEで夏を過ごしたので、スウェーデンのDavidWindestålによる記事の無料翻訳トリコプター-回転を補正し、回転を制御する3つのモーターと回転機構を備えたペペラットの構造について正しく書きました)。 (元のウェブサイトに特別な必要がなくてはならないという大きな要求です。なぜなら、それはしばしばハブなしで落ち、カットの下にたくさんの写真があるからです)
最初のバージョンのトリコプターの建設以来、私は設計を改善する方法を見つけようとしてきました。常に変化するプロペラ、モーター、速度コントローラー、ビーム長、スイベル機構などです。 多くの場合、私は各フライトの前にすべての束を変更しました。 一般的に、私は常に自分に最適な選択肢を見つけようとしました。
スクリードが大好きです。 彼らは建設プロセスを簡単かつ迅速にします。 それらは落下中に分解し、自分自身にエネルギーを与え、耐衝突性のトリコプターの鍵となります。 曲がったモーターの軸を変更する代わりに、引き裂かれたスクリードを交換する方が簡単です。 そして最も重要なこと-現場で行うことは非常に簡単です。
主な詳細
(注:他の同様の詳細を使用できます)モーター:
DT750 750kVスピードコントローラー:
TURNIGY Plush 18ampバッテリー:
3s Turnigy 25-35C 2200mAh LiPoServa :
BMS-385DMAXデジタルサーボメタルギアプロペラ:より重いものを持ち上げる必要がある場合は、
GWS 10 * 4.7または
GWS 11 * 4.7より良い長さ:約50 cm(中心からモーター軸まで)
離陸重量:860グラム(バッテリーまたはバッテリーなしの670グラムを含む)
飛行時間:約12分
ハンギング電流:約10アンペア
モーターテスト:13.2A@11.7V-7770RPM-モーターあたり1080グラム(トラクション)
フレームの詳細
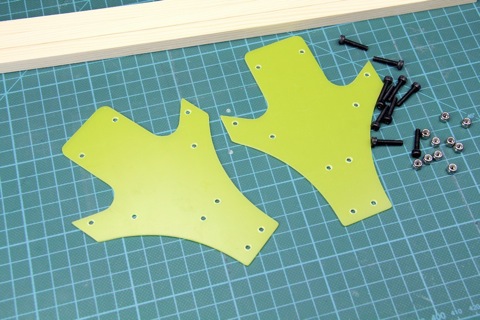
私はまだ
最初のバージョンのトリコプターの中心部分が好きで、友人はCNCマシンで私のためにいくつかを喜んでカットしました。
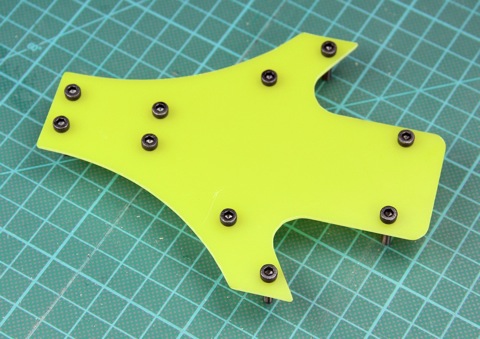
10個のM3x16 mmボルトが必要です。

そして、同じ長さの3つの光線。 松から10x10 mmの48cmの光線をカットしました。

フロントビームの穴は、エッジから25mmに開けられています。 これはワークピースの計画以上のものですが、長さ40mmの前にある小さな木片のように、追加の材料がフレーム全体に強度を追加します。
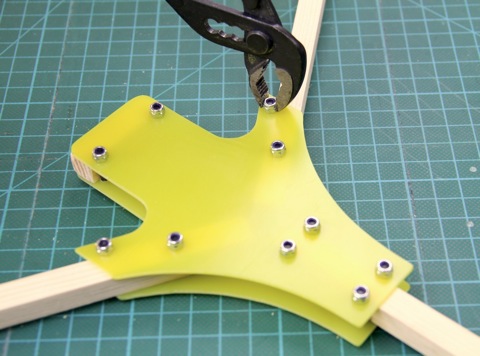
このすべてのM3ナットを固定してねじる時が来ました。 ナットを締める前にビームを配置します。 ビームは、展開時にボルトと接触している必要があります。 ナットを締めすぎないように注意してください。ただし、飛行中にビームを保持できるようにナットを締める必要があります。 さて、フレームの主要部分の準備ができました。
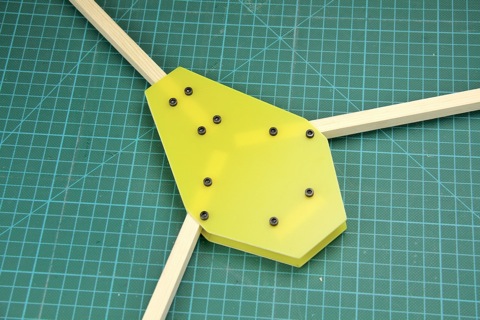
より単純な中央部分を使用することもできます。 同時に、多くの機器を掛ける必要がある場合に便利です。 メインの図面の角を丸くするだけで、すべての線が直線になるため、CNCマシンがない場合は切断しやすくなります。
スピードコントローラー

速度コントローラーを「修正」する時間。 それらから熱収縮を取り除きます(注意してください、内部を損傷しないでください)。
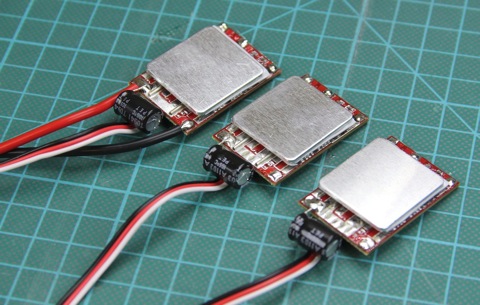
2つのスピードコントローラーからすべてのワイヤー(3ワイヤーを除く)を取り外し、3番目のワイヤーにも電源ワイヤーを残します。 この3番目の規則は最後にあり、長さがちょうど十分であることがまさに起こります。
(注:他の速度コントローラーで十分な長さがあるかどうかを確認してください)。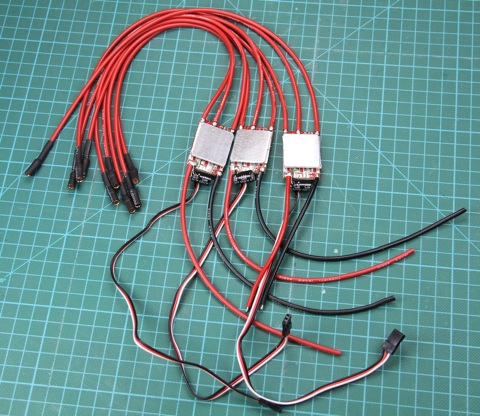
16AWGケーブルを使用してワイヤを延長します。 また、モーターのコネクタをはんだ付けすることをお勧めします。 また、熱収縮を使用して、レギュレータをほこりや汚れから保護します。
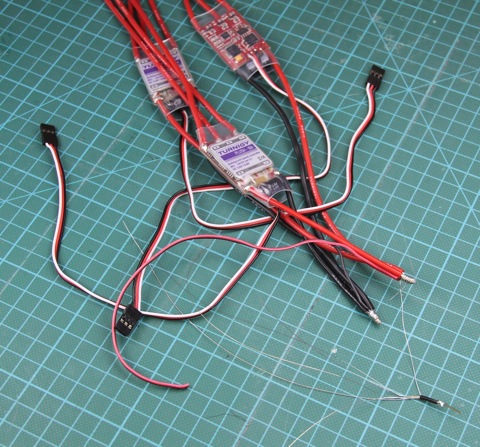
すべての電源線をはんだ付けします。 はんだ付けの際に苦労しないように、ワイヤをワイヤで包みます。これにより、それらをまとめるのに役立ちます。
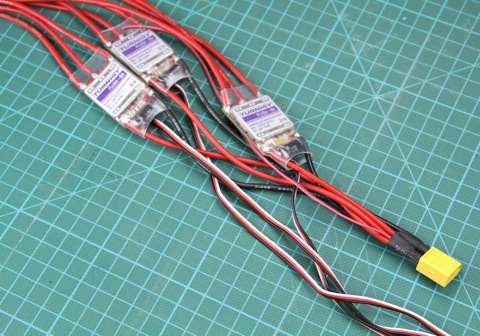
電源コネクタをはんだ付けすると完了です。
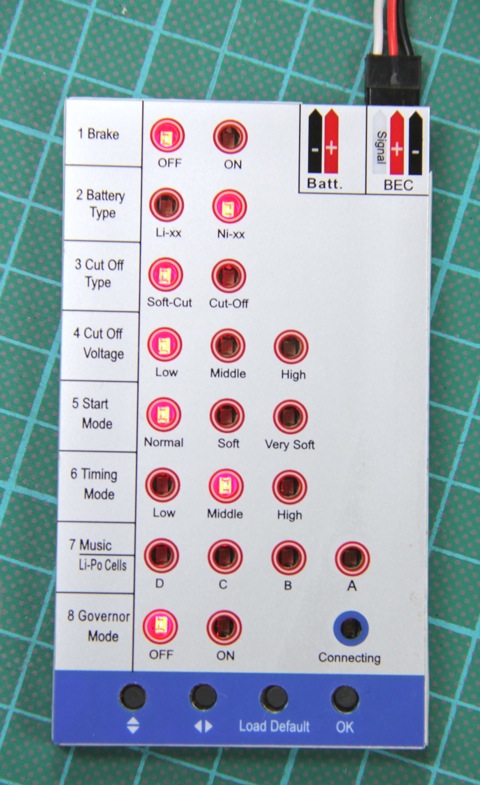
スピードコントローラーをプログラムします。 プログラミングにカードを使用しましたが、このような設定は速度コントローラーに適しています。
(注:コントローラーのプログラミングにカードを使用する必要はありません。コントローラーの説明書の指示を使用できます)。スイベル機構

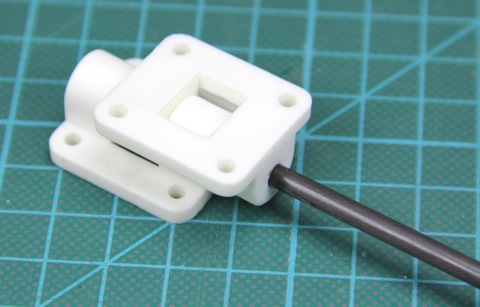
後部エンジン回転機構の時が来ました。 これは
40mmのフロントホイール
マウント付きのバッグです。 2.5ノットターンでたったの2.5ドル。

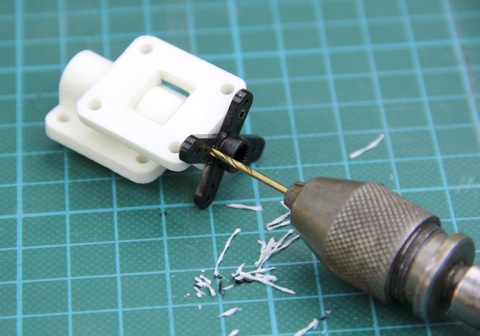
これらのうち2つを取り、そのうちの1つに4.2mmの穴を開けます。
掘削後にすべての破片を取り除き、4mmの軸を挿入します
(注:釣り竿のカーボンチューブなど) 。 彼女は、ドリルされていない部分を明らかに修正します。 片方をもう片方に挿入する必要があります。
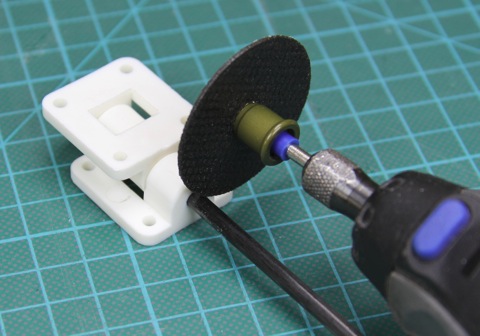
過剰を切り落とした。 ディスクでドレメルを使用しました。

穴をあけた部分にステッチがぶつかる。
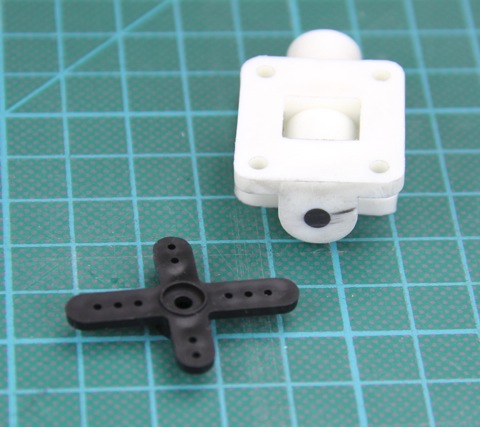
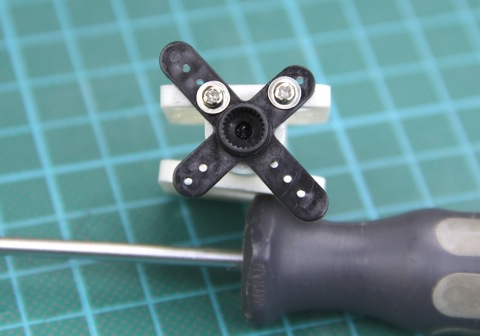
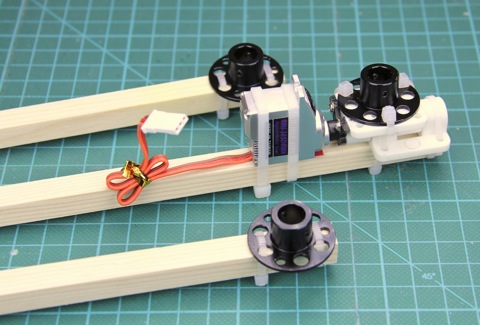
回転機構をサーボに接続します。 使用済みのサーバーにはクロスマウントが付属しており、これは私たちに最適です。

横材を平らにしましょう。

回転機構に接着剤を付けて、後でドリルしやすくし、強度を維持します。 いくつか重要なこと:穴を開けていない部分に十字を接着し、その穴がシャフトの設置場所と一致するようにします。 動作しない場合、サーボに余分な負荷がかかります。
では、2つの1.2mmの穴を開けましょう。 次に、固定するネジの長さより少し深くドリルします。
そして、例えば浅いサーボからのネジで固定します。
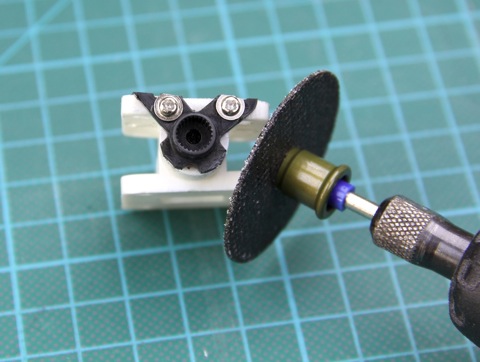
過剰を切り捨てます。
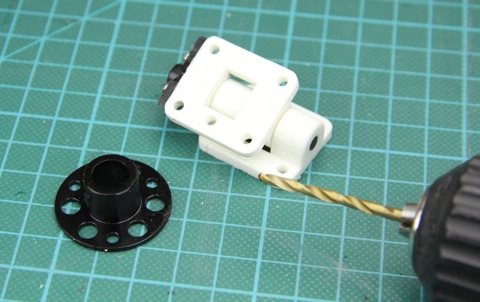
DT750マウントは、このようなメカニズムに非常に適しています。 回転機構に穴を開ける必要があるのは、モーターを取り付ける場所(およびサーボからクロスピースをねじ込む場所)だけです。

モーターを固定するために必要なのは、3つの2.5mmタイだけです。 回転機構のたわみを妨げないように、写真のようにカプラーを固定することをお勧めします。

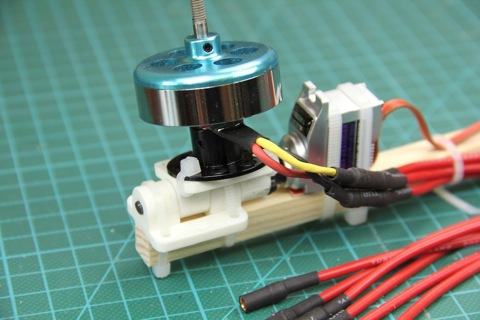
そして今度は、マウントの底を切断して、サーボを少し改造します。 サーバーの高さを合わせるには、0.8mmのファイバーグラスを追加するか、これらの同じ0.8mmに回転機構を研磨する必要があります。

旋回機構の準備ができました。 リアビームへのタイを締めるだけです。

私たちはより厚い結び付きでサーボを引き付けます。 スクリードを取り付けるときは、スクリードロックがビームの両側にあることを確認してください。
モーターとアセンブリ
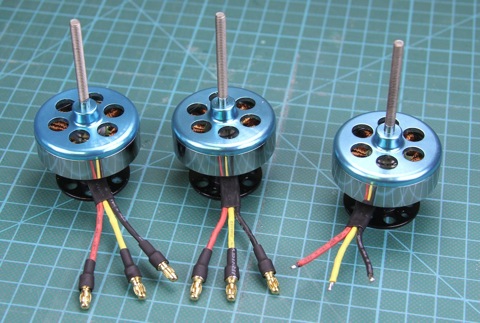
DT750モーターへのコネクタのはんだ付けを始めましょう。 DTshkiが大好きです。 彼らは非常に効果的です、私は高いトルクを持っています。 これは、プロペラがより高速に回転速度を変更できることを意味し、トリコプターはより安定し、良好な応答をします。 私はまた、不必要な固定なしでプロペラを取り付けることができる4mmのねじ付きシャフトが好きです。

しかし、これらのモーターの弱点は、巻線と巻線の接合部です。 ワイヤーを前後に動かすと、ほとんどの場合、ワイヤーが脱落します。 これを修正してエンジンの耐久性を高めるために、この場所をエポキシで修正します。

エンジンの軸はモーターマウントからわずかに突出しているため、摩擦を防ぐためにビームに小さなくぼみを作りました。 ビームに対するモーターの摩擦は不必要な振動を引き起こすため、ドリルで小さなくぼみを作るのが最も簡単で最速の方法です。
2.5mmモーターカプラーをビームに接続します。 シンプル、安価、高速。 そして、地面/アスファルトなどとの衝突中にモーターを節約します。

モーターの車軸が長すぎるため、転倒時にモーターが損傷するリスクがあります(振動が強くなります)。 GWSプロペラとボルトに十分な約21mmを残して、余分な部分を切り取りました。

次に、エンジンを設置します。 ボルトを固定するために常に何かを使用してください。そうしないと、飛行中の振動から振動が解けてしまいます。
ワイヤーがビームに対して垂直になるようにリアモーターを取り付けます。そうすると、ワイヤーがサーボにくっついたり擦れたりしません。
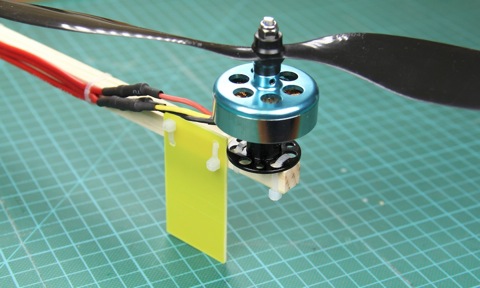
着陸装置はタイで固定され、プロペラはモーターに取り付けられています。 プロペラは4mmに穴を開ける必要があります。 特別なボルトを使用して、プロペラが経時的に脱落しないようにします。

速度コントローラーと、サーボ用の延長コードをインストールします。
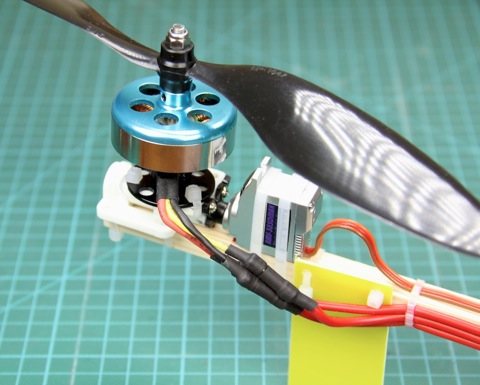
そのような尾部回転機構は摩擦が低く、非常に耐久性があります。 Servaは、ネジからの空気の流れをあまり妨げないように垂直に取り付けられています。 私は、薄っぺらで余分な詳細がないとき、サーボの直接駆動が好きです。
カメラとフライトコントローラーの減価償却
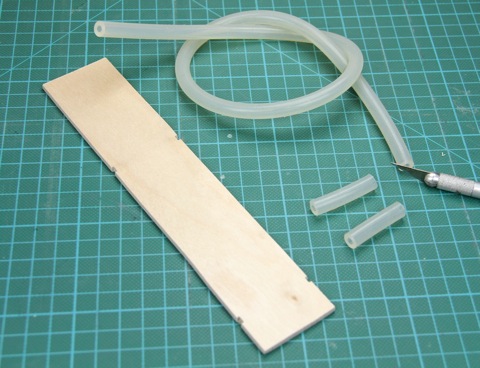
バッテリーとカメラの取り付けについて説明します
(注:以降、これをサスペンションと呼びます) 。 振動を防ぐために、2個の38mmシリコンチューブを使用しました(注:ペットショップの水槽用の燃料ホースまたはチューブ)。 外径8mm、内径3mm。
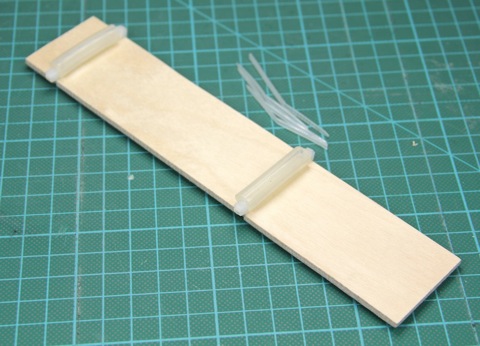
チューブをサスペンションに固定するために、2.5mmのタイを使用しました(突然です!)。
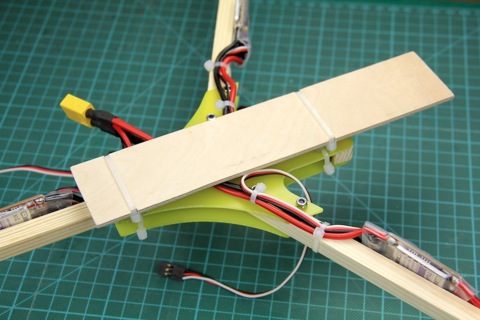
サスペンションは同じ2.5mmタイで下から固定されます。

私は今でもKapitanKuk(KK)コントローラーが好きです。どこでも購入できます
(注:さらに良いのは、例えばMultiWiiや地平線に自動調整された別のフライトコントローラーを購入することです) 。
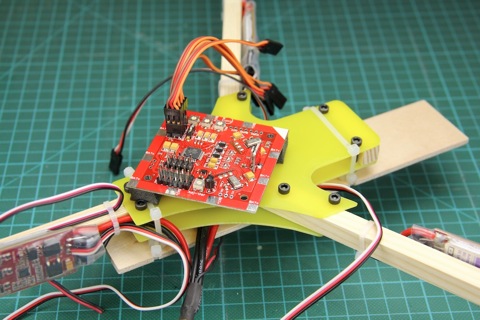
フライトコントローラーを修正するために、厚い粘着テープのいくつかの層からの四角形を使用しました。 それらをフレームとフレームに貼り付けてください。
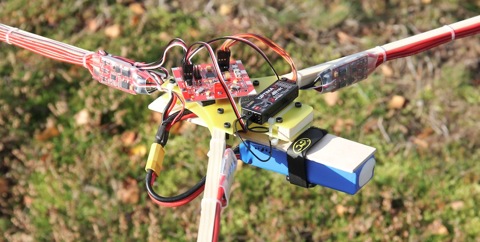
バッテリーを追加して飛行準備をします。

フレームが組み立てられます。 輸送に非常に便利です。
私が翻訳を気に入ってくれたことを願っています。実際、私からの翻訳者はまあまあです-私は学校や大学のテスト/試験にほとんど合格していませんこのトリコプターのいくつかのビデオ飛行
その他
、YouTubeの著者のチャンネルで 。
詳細はどこにありますか?
詳細のほとんどは
hobbyking.comウェブサイトで購入できます。また、割引のためにこの
サイトをバディコードで使用することでお金を節約することも悪くありません。
また、goodluckbuy.comには
マルチコプター用のセクション全体があります。特に、かなり安いフライトコントローラー(さらにはヘリコプター全体)を見つけることができますが、すべてのコントローラーがトリコプターフレームをサポートしているわけではないことに注意してください。
完全な部品リストと利用可能な代替品
交換の意味-個人的にトリコプターを装着します。
この価格に、配送費用を追加する必要があり
ます 。また
、ここで得られる割引を取り除く必要があり
ます 。
もちろん、トリコプターには
制御機器とそのための
バッテリーも必要です。