マイクロロボットの大量生産のための新しい技術は、ハーバード大学マイクロロボット技術研究所で開発されました。 ロボットの製造用ブランクは、「サンドイッチ」に接着されたさまざまな材料の複数の層で構成され、アセンブリの「足場」として機能するロボット部品と追加のヒンジとサポートがレーザーカットされます。 ワークからロボットを取り出すには、ロボットを折り畳み、折りたたんだ状態で固定し、不要になった補助要素を切断します。
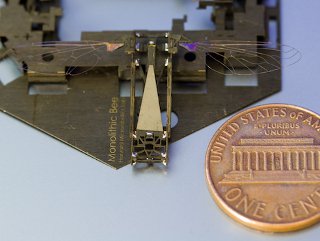
実験室で作成された飛行ミツバチロボット(モノリスミツバチまたはモビー)のプロトタイプの重量は90ミリグラムで、アセンブリの「サンドイッチ」は18層の炭素繊維、チタン、銅、セラミック、柔軟なプラスチックフィルムで構成されています。 ロボットの組み立ては、子供用のクラムシェルの本のように一回の動きで行われ、その本体は、曲がった場所で銅パッドを固定する小さな液滴のはんだの助けを借りて組み立てられた位置に固定されます。
この技術を使用して、複雑な電気機械デバイスを組み立てることができます。 電気回路、センサー、その他のコンポーネントをサンドイッチに統合できます。 同様の方法で、多層プリント回路基板は長い間作られてきたため、そのようなデバイスの大量生産を確立することは比較的簡単だと科学者は言います。
折り畳みデバイスの設計は、従来のものよりもはるかに複雑です-比較的単純な部品をセットアップする代わりに、複雑な3次元パズルに対処する必要がありますが、完成品を新しい方法で製造および組み立てることは、この複雑さを補う以上のものです。
ソース-
ハーバード大学 。