ハブラチタテルこんにちは! 今日は、少し前まで、友人、測量士、航空測量士をどのように助けたかについてお話します。 私の友人は、簡単に言えば、飛行機から地球を撃っているのです。このため、彼らはいくつかの機器とソフトウェアを持っているので、彼らはそれを改善したいと思っています。 今年、空中カメラが取り付けられているプラットフォームのドリフト角を自動的に補正するソフトウェアモジュールを作成するというアイデアが生まれました。 以前は、これは何らかの手動モードで行われていました(プラットフォームは非常に古い)ドリフト角を計算することにより、何らかのデバイスを介してプラットフォームを修正することができました。 問題は、この角度を計算し、さらに補正することでした...実際、この記事への関心が消えない場合は、カットを要求します(慎重に7 MB gif'ok)...
はじめに
ドリフト角は、航空機の軸と飛行機が飛行する座標ルートとの間の角度であり、気象条件、つまり風のために発生します。
たとえば、理想的な条件がある場合、空撮は同様の方法で行われます。

しかし、そのような状態はもちろん非常にまれであり、通常、高度10〜20 km / hの風速と航空写真はすでに次のようになっています。

つまり、飛行機は、ある特定のルートに沿って明確に飛行するために、風の強さに抵抗します。
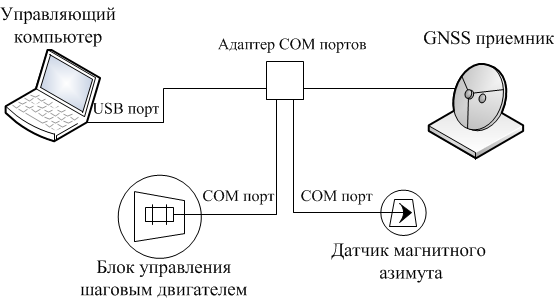
この問題を解決するために、次の機器が提供されました。
•言い換えれば、磁気方位センサー-コンパス。
•また、ステッピングモーター制御ユニットは、ステッピングモーター自体とペアになっています。
ソフトウェアの実装は、プラットフォーム上で行うことが決定されました。
機器を制御コンピューターに接続するスキーム:
磁気方位センサー
この問題を解決するために、最初の近似として、センサーを内蔵したKVH Azimuth 1000デジタルコンパスを選択しました。その主な有用な機能は、パラレルポートプロトコルを介したNMEA 0183形式のデータ転送です。

以前、ナビゲーション受信機からのデータのエミュレートに関する記事でこの送信形式を取り上げました。 方位角データの場合、角度値を見つけることができるセンサーからラインが届きます(10 Hzのデータリフレッシュレート、補正タスクの実装に十分です)。 詳細仕様:
- 精度±0.5°、自動補正あり;
- 直径16 cm;
- 高さ7 cm;
- フィールド感度6.5〜65μT。
- 重量340 g;
- 接続線の長さ2 m;
- -20〜70°Cの動作温度範囲。
- NMEA 0183形式のデータ周波数10 Hz。
- 供給電圧12 V
データがNMEA形式で転送されたという事実により、私はすでにそれを使用していたため、このデータを受信するためのモジュールが.Netで作成されました。
ステッピングモーターコントロールユニット
特に、わかりやすいコマンドをステッパーモーターを制御する信号に変換できるプログラムされたコントローラーである制御ユニットを提供する国内メーカーがあるため、ステッパーモーターの制御システムをゼロから実装するのはコストがかかりすぎます。 コマンドは、パラレルポートプロトコルを介して送信されます。
SMSD-4.2が選択され、コンピューター(LPTポートまたはUSBポート)または外部マスターコントローラーから自律的に動作できます。

デバイスの機能と機能:
- デバイスに保存されたプログラムによるステッピングモーター制御。
- 内蔵不揮発性ROMに対する制御プログラムの書き込み、変更、または読み取り。
- PCや外部コントローラーを使用しない自律的な作業。
- LPTまたはUSBポート(仮想COMポート)を介したコンピューターからの制御。
- TTL信号を受信し、論理信号「ステップ」、「方向」、および「解像度」によってステッピングモーターを制御します。
- PCからASCIIコマンドを受信し、複雑なアルゴリズムに従ってステッピングモーターを制御します。
- 手動モードで作業する機能。
- 緊急センサーからの信号を受信すると、ステッピングモーターが自動的に停止します。
- リバースセンサーから信号を受信すると、エンジンの回転方向が自動的に切り替わります。
- 外部デバイス(センサー)から信号を受信するための2つの追加入力。
- 1つの追加入力-開始位置を検索します。
- 複数のSMSDブロックの動作を同期する機能。
仕様:
- ステッピングモーターの制御チャネルの数-1;
- ステッピングモーターの運動パルスの周波数範囲は1〜10,000 Hzです。
- 周波数設定精度-0.2%より悪くない;
- 供給電圧-12–48 V;
- 最大出力電流-4.2 A;
- 外部デバイスとセンサーから信号を受信するための追加入力の数-3(外部デバイスとの同期用に2つ、初期位置を見つけるために1つ);
- ステップ破砕モード-1、1 / 2、1 / 4、1 / 16。
ステッピングモーターコントロールユニットとの相互作用モジュールを実装するために、コマンドとその実行順序を検討しました。 チームはミニプログラムです:
- 見出し
- 方向、速度、加速度、ステップ数などの特定のパラメーターのリスト。
- 実行を開始します。
制御ユニットを備えた作業モジュールが実装され、速度が必要な場合(設定されていない場合は、最適な速度が選択されている場合)および方向のみ、角度を設定できます。
おわりに
また、上記のソリューションを組み合わせた結果、ドリフト角の自動補正モジュールが作成されました。 以下はデモ
ビデオです 。磁気方位角を変更したときに、プラットフォームが所定の角度でどのように補正されるかを示しています。
そして、これがドリフト角の自動補正を伴う航空写真のプロセスがどのように見えるかです。

記事を読んでフィードバックを待つのに何分も費やしたことが無駄ではないことを願っています...