この記事では、ipi mocap studioと2つのKinectセンサーを使用して取得したMoCapデータを使用してキャラクターをアニメーション化する方法を説明します。
これを行うには、次のものが必要です。
1-2 Kinectセンサー
iPi Studio、iPi RecorderAutodesk Motionbuilder 2013は優れていますが、2012年を使用しています。 2013年は私にはうまくいきません
パート1. MoCapデータの取得
校正
iPi StudioとiPi Recorderをインストールし、Kinectを接続します。 これについての
詳細は、古いバージョンのプログラムの
wiki ipisoftの説明を
ご覧ください。最新バージョンでは、構成が少し異なります。
2つのセンサーからMoCapデータを受信するには、
キャリブレーション用のビデオを記録する必要があり
ます 。
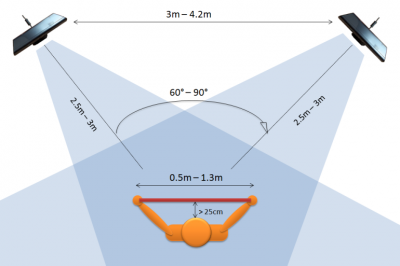
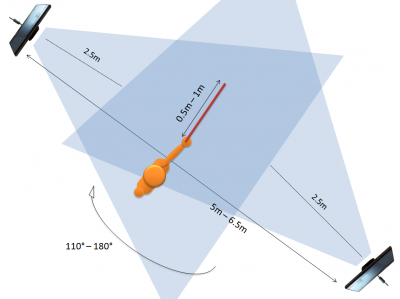
センサーは2つの構成で配置できます。
- センサー間の角度は30〜90度です。

- センサー間の角度は110〜180度です。

キャリブレーションには、サイズが0.5mの段ボール/ボードを使用します。 幅(1mから1.3mを推奨)および0.7mから 長さ(1-1.5 mを推奨)。校正面は各センサーからはっきりと見えるはずです。 間違っている:
 重要:
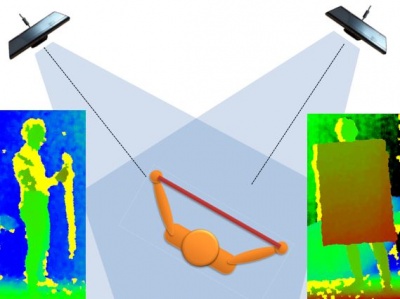
重要:深度マップの黄色は、センサーがこれらのポイントで深度を識別できないことを意味します。 それらができるだけ少ないことが必要です。
重要:センサーの位置を変更する場合、センサーを再キャリブレーションする必要があります。
- iPi Recorderを起動し、記録デバイスとして1-2キネクタを選択します
- 次に、プログラムは背景を分析します。センサーの視野内で静止しているオブジェクトのみである必要があります
- [スタート]をクリックし、立ち上がって段ボールを保持して、各センサーから見えるようにします。 段ボールをさまざまな方向に動かす必要がありますが、その表面は両方のセンサーから見えるはずです。 E
- 停止をクリック
- iPi Studioを開く->新規プロジェクト->記録したばかりのビデオを選択->キャリブレーションプロジェクト-> 3D平面に基づいてキャリブレーション->待機->シーン->シーンを保存
モーション記録とアニメーションのインポート
- iPi Recorderを起動します
- 次に、プログラムは背景を分析します。センサーの視野内で静止しているオブジェクトのみである必要があります
- [スタート]をクリックし、Tポーズで2〜3秒間立ち、記録したい動きを再生します。
- 停止をクリック
- iPi Studioを開く->新しいプロジェクト->記録したばかりのビデオを選択->アクションプロジェクト->ビデオが複数のカメラから記録された場合、以前に受け取ったシーンを開く必要があります->適切なTポーズのフレームを選択-> MoCapの起動方法を確認ビデオがオフになっていて、背景が削除されている場合(表示中)に便利
- [エクスポート]-> [ターゲットキャラクターをインポート]-> [ 3dmaxからBipedをインポート]をクリックすると、動きを繰り返す男性の横にあるビデオを見ると、スケルトンが表示されます
- [アニメーションをエクスポート]をクリックして、ファイルをfbx形式で保存します
パート2.キャラクターアニメーション
- Motionbuilderを起動->ウィンドウ->アクター/キャラクターコントロール-最初にこのウィンドウを開きます。キャラクターをインポートした後に開くと、モーションビルダーがあります。
- fbxアニメーションでファイルを開きます(ファイル->開く)
- 次に、キャラクタライズを行う必要があります。これについて詳しくは、 こちらをご覧ください 。motionbuilderでムービーを学習(アニメーションを追加)することもできます。
- ウィンドウ->アセットブラウザ->テンプレート->キャラクターアイコンをスケルトンにドラッグ->キャラクタライズ-> Biped
- アセットブラウザ->マージ->アニメーションなし、またはファイル->マージ->右側の列のいずれかから、キャラクターのワークスペースにドラッグアンドドロップし、すべてのチェックを外します
- Character Controlsで人を選択し、次に行う方法を確認しますAnimation-> Plot All-> Plotをクリックします。
保存する
キャラクターをユニティにインポートできます
開発者のコメントによると、ipistudioは、床に近い位置での追跡はiPi Mocapの強みではありません。6室システムでも、障害や認識エラーがあります。 しかし、一般的に、腕立て伏せ、強調座り、強調強調、および宙返りなどの動きでは、合理的にうまく機能します(定期的に片手を失ったり、足の位置を間違えたりします)。 カメラの1つ(または両方、実験)を高くすることをお勧めします:床から1メートル半。
成功。