今年初めて、ロシアのチームが米国海軍研究局(ONR)が後援するAUVSI財団とONRの第15回国際ロボサブ競技自律潜水艦競技会に参加しました。 技術者にとって、これは水中ロボット競技のスーパーボウルと呼ばれます。 予選テストの結果によると、チームは最終に到達し、最終5位になりました。

2012年7月17〜22日
SSC Pacific TRANSDEC、カリフォルニア州サンディエゴ
今年は、さまざまな国から合計28チームがこのコンテストに参加しました。 極東連邦大学の大学院生と従業員、海洋技術問題研究所の従業員で構成されるウラジオストクのチームは、デバイスとソフトウェアがまだ未加工であり、すべてではないという事実にもかかわらず、参加の最初の年にコンテストの決勝に進み、トップ5チームに参加しましたコンテストのタスクが完了しました。
これは、ロシアのチームの自律装置がどのように見えるかです:
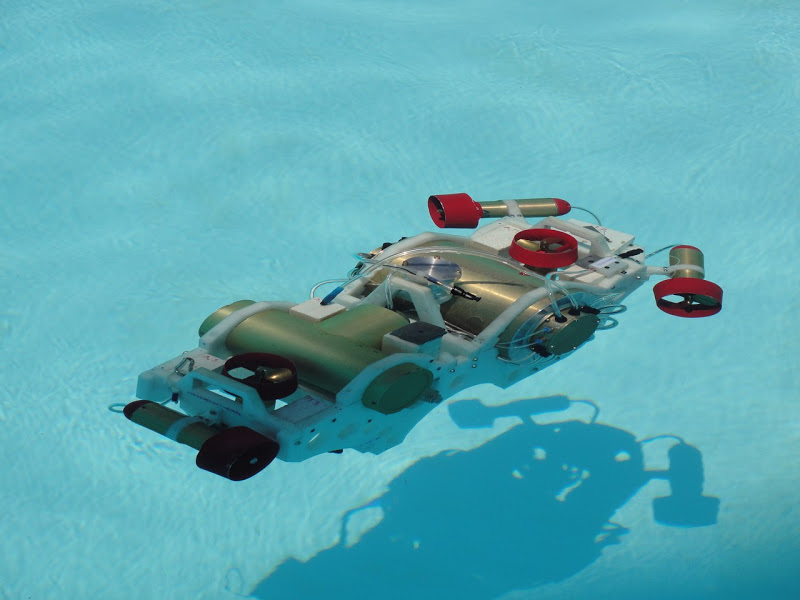
デバイスには2台のオンボードコンピューターがあります。1台目はムーバーのナビゲーションと制御に使用され、2台目は画像認識に使用されます。
競技会の規則によると、トライアルヒートの時間はライブキューで1日30分2回与えられました。

そのため、彼らはホテルの部屋のバスルームでデバイスをさらにデバッグすることを余儀なくされました。

そして夜、ホテルのプールで誰も見えません。

ロシアチームの最終パフォーマンス:
コンテストの全放送(3400分)は、次のリンクから入手できます(閲覧するには登録が必要です)。
tive.todocast.tv最終パフォーマンスは約3150分から始まります。
以下のリンクで競争について読んでください。
ロボサブオフィシャルLos Angeles Timesに公開する遠隔操作の水中車両の競技に関する以前の資料がハブで公開されました。
ロシアのチームは、水中ロボティクスの世界チャンピオンに2回なりましたDVFU ROVチーム2010私たちはMATE International ROV Competition 2010のチャンピオンです、私の友人MATE国際ROVコンペティション2010のジュニア2水中ロボット水中ロボット工学の国際大会でのロシアのチームそのため、自律型デバイスを作成してタスクを完了するように強制することははるかに困難です。
PS 2008年に遠隔制御ロボットの競技会に参加した最初の年にウラジオストクの水中ロボットのチームが8位になり、現在では2010年と2012年に2度1位になったことを思い出させてください。 したがって、安定した資金で、数年後には自律型水中車両の競技会で1位になります。