大学での積極的な研究の後:ラボ、コースワーク、試験-夏に私はとても面白いことをするために何かを壊しています、私の脳を伸ばしてください、自分でお願いします。
だから今回は十分ではありませんでした-私はいくつかのクールなロボットを作ることにしました。 あらゆる種類の車にうんざりしているが、まだマルチローターシステムに到達していない。 私はヒューマノイドを作ることにしました:)ヒューマノイドは動作しませんでした...
しかし、もちろん、彼はこのアイデアに火をつけ、ターミネーターとスターウォリアーに対する子どもたちの見解を思い出し、仕事を始めました。
そして、ここで何が起こったのです:
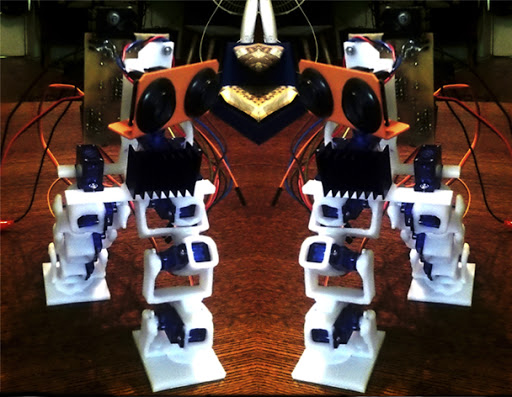
投稿では、
Timmyと呼ばれるこのものを作成するプロセスについて説明します(
Lame Vasyaと呼ばれることもあります-最後にビデオで説明します)
説明は、すべて発明された形式のままにします。 すぐに予約しますが、追加のソースや例に頼らず、すべてを行って自分で発明しました。 そしてそれを発明する方法を学ぶために!
そこで、私はサーボを「筋肉」として使用することを決定し、8つの
TowerProマイクロサービスを注文しましたが、2つの
Fliecマイクロサービスがまだありましたが、非常に熱くなるため、あまり好きではありませんでした(頭の写真ではラジエーターがそのようなサーバーにあります)。
その間、サーボがあったので、頭脳を作ることにしました。
Atmega168マイクロコントローラは1つしかなく、私には思えたが、
それで十分だろう。
LUTのトラックをすばやく描画しました。
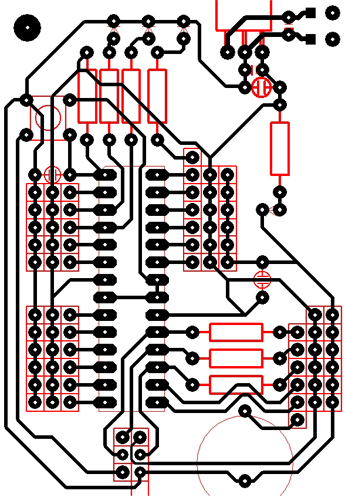
申し訳ありませんが、特別なデザインではありません。 彼はボードLUTを作成し、ローズの合金で錫メッキし、穴を開け、すべてをはんだ付けしました。

(写真の品質については許しを求めません、それでも許しませんが、私は正当化できます-家は暗く、写真を撮る方法がわかりません)
明るいLEDは操作性の通知であり、青は任意のピンに接続して、何かを示すタスクをハングさせることができます。 スキーカーはどのピンにも接続できます。
シンプルな
LM7805が電力に使用されていますが、手元にパルスコンバーターは見つかりませんでした。 次に、いくつかのサーボから非常に深刻な電流が流れ、非常によく加熱されるため、小さなラジエーターがそれにねじ込まれています。
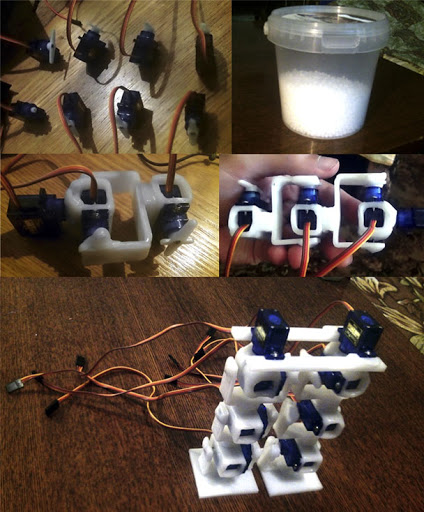
それで、サーボが来て、「おがくず」の準備ができました(おがくずの頭の中に)...スケルトンの作り方と方法を考える時が来ました...そして
ポリカプロラクトンと呼ばれる材料が
助けになりました。 これは医療用プラスチックであり、生分解性で無害で、融点は約
60度です。 私はそれを手で溶かして成形しました:)唯一のマイナス点は、製品を
50〜60度に加熱してはいけないことでした。 しかし、
10分間のアクティブな作業の後、最大
40度まで温まったので、彼らは恐れていたことがわかりました。
私の頭の中で、スケルトンの概略図を描いて、到着した問題を解決することにしました。
電子レンジで溶かした後、水に浸した多形体は、2枚のガラスの間でシートを押しつぶしました。 それから彼はそれを細かく切断し、ブロードライヤーで曲げてはんだ付けしました。 したがって、すべてが判明しました。 簡単でシンプル。 余分なトリミングは何度も溶かすことができます-無駄のない生産。
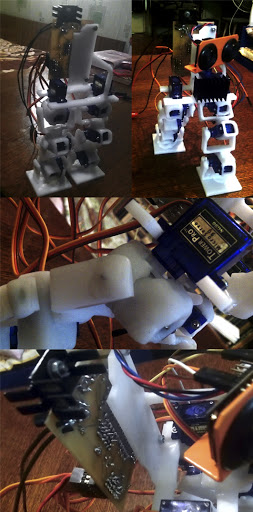
それから彼は、サーボモーターのボードとマイク付きレンジファインダーを固定しました。
これらすべての冒険の後、プログラミングの時間です。 アセンブラーでプログラムを作成しました。 プログラムの結果-動きは次の形式の行列で設定できます
act: .db 0x3c,0x2a,0x3c, 0x2e,0x42,0x30, 0x36,0x36 ;1 .db 0x3e,0x24,0x42, 0x20,0x40,0x39, 0x36,0x36 ;2 .db 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00 ;
ここで、1行で8個のサーボモーターのそれぞれの角度を
0x16-0度、0x56-180度に設定しています。 16ビットタイマーに割り込むと、行が変わります。 移動速度を制御する必要がある場合-プリセレクターの係数を減らし、マトリックスの行数を増やす必要があります。 私はまだ0.5秒の量子化を行っており、0.5秒ごとに狂ったように動いています。
これらの2行が0.5秒の量子化でどのように機能するかの例を次に示します。 たった2行で、Vasyaはすでにリンプしています!
次に、普通に歩くこと、センサーの使用を開始すること、過去に送信してジョンコナーを救うことを学びます! 普通に歩いたらすぐに、ビデオを投稿します。