良い一日!
HabréにはSVPについての
記事がすでにありましたが、私たちはそれを読み、私たちのロボットを構築することを決めたという印象を受けました。 しかし、この記事では、エアクッションの作成だけでなく、有用な機能を与えることについても説明します。
カットの下にたくさんの写真。
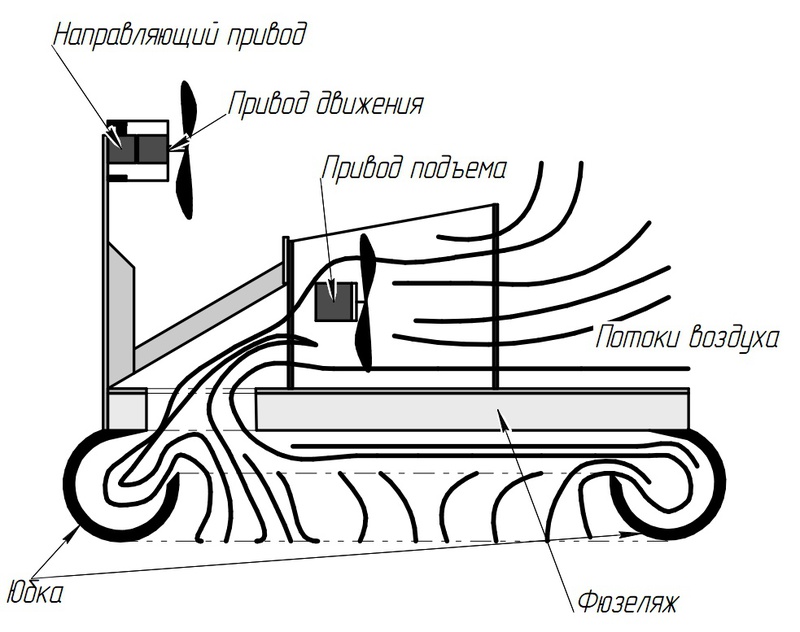
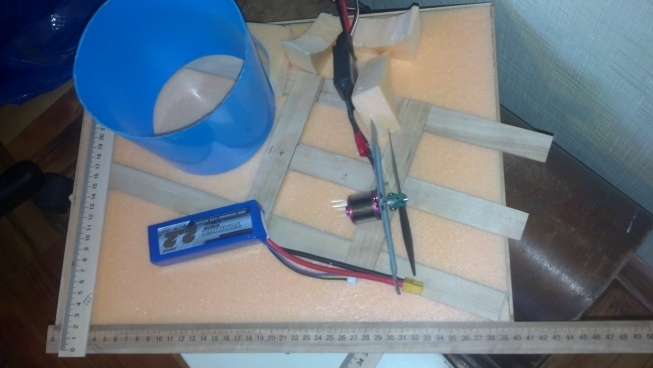
設計の最初のバージョンが承認された後、最も興味深いことが始まりました-即興の材料から実用サンプルを作成します。 彼らは船をラップトップより少し大きくすることにしました。 発泡スチロールシート、ベビーバケツ、定規は最も近い市場で購入され、電子機器は趣味で注文されました。
買い物リスト:
-GWS EPプロペラ(DD-5030 127x76mm)-ネジ;
-P2632ブラシレスアウトランナー3800kv-リフティングエンジン。
-バーディー50AブラシレスESC w / 3A BEC-スピードコントローラー;
-Turnigy 2200mAh 3S 20C Lipo Pack-電源;
-Turnigyバランサーと充電器2S-3S-バッテリーの充電。
-Hobbyking 60w電源-充電用電源;
-HK15168コアレスアナログマイクロサーボ8g / 1.2kg / 0.12s-サーボ;
最初に組み立てられた設計は機能していることが判明しましたが、多くの欠点がありました。
-バランスが悪い。
-リフティングエンジンからの大きな音。
-周辺機器をインストールするためのスペースが不足しています。
これに加えて、パワーテイクオフは、船舶の移動と持ち上げの両方に十分であると予想しました。 しかし、私たちの希望は実現しませんでした。別のエンジンを購入し、パワーテイクオフの穴を塞ぐ必要がありました。
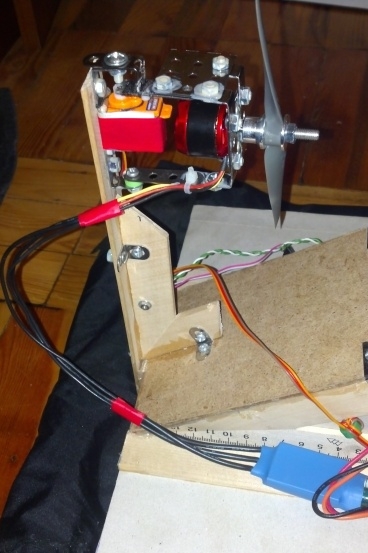
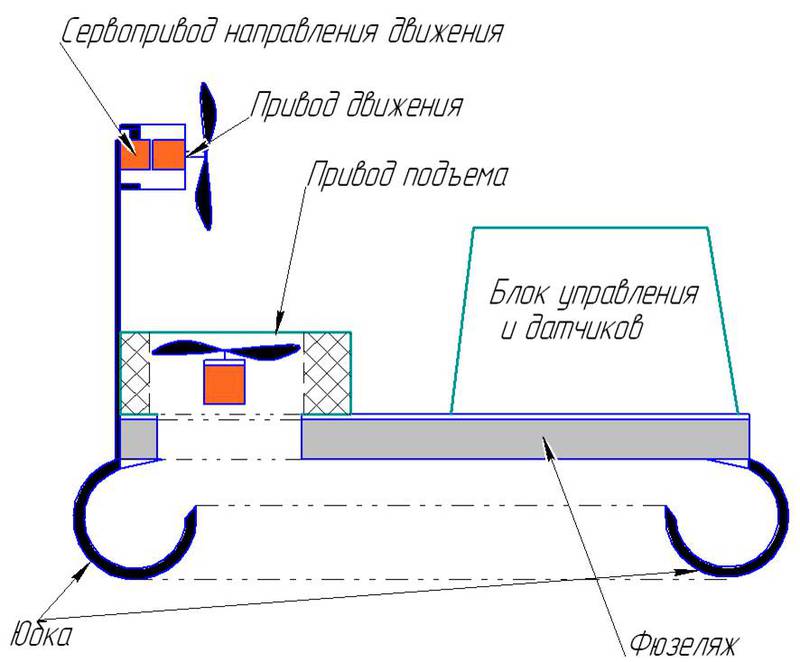
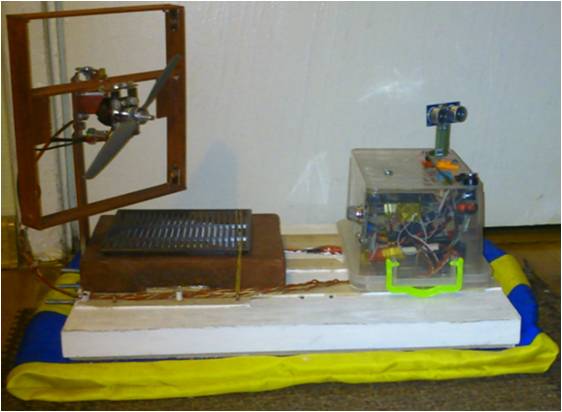
変更の結果、船体にサーボドライブ付きのマストが追加されました。
そして、最初のテストのビデオ:
最初のテストでは、枕の設計に失敗しました。 それが何で作られていて、古い傘を持っていたので、この枕は船の下で曲がる傾向がありました。 管理は、stm32vldiscoveryおよびラジコンマシンからのリモートコントロールによって編成されました。 テストでは、リモートコントロールの距離が非常に短いことも明らかになったため、Bluetoothモジュールをインストールすることにしました。
ボディとは別にスカートの写真:

次の変更の結果:

急いで作成されたプログラム(5つのボタンとそれ以上)はいくつかの問題を解決しました。 しかし、それでもなお、当時の船の状態は私たちの考えや考えに同意しなかったため、より深刻な修正を行うことにしました。
un 2.0
レイアウトの変更に加えて、制御回路が変更されました。 STM32VLDiscoveryはSTM32F3Discoveryに置き換えられました。 その理由は、stmf3に加速度計、ジャイロスコープ、磁力計が存在していたためです。
そのようなサンドイッチが判明しました:

センサーも購入しました。
-超音波距離センサーHC-SR04;
-湿度および温度センサーDHT11;
-IRセンサーHC-SR501;
-ガスセンサーMQ-2。
また、センサーに電力を供給するために、DC-DCコンバーターはLM2596チップ上にあります。 サイリスタとオープニングリレーに基づく自動電源オフシステムも実装されました。
現時点でのロボット内部:
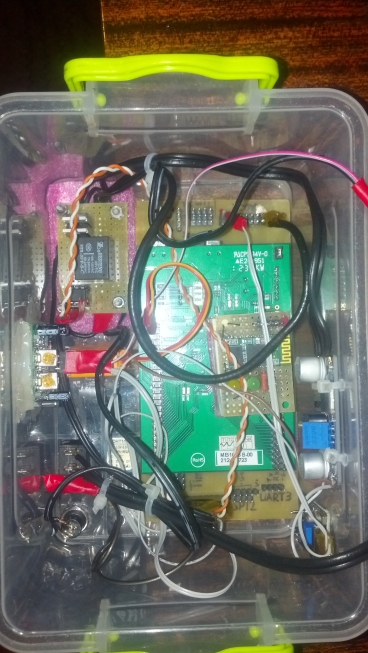
超音波センサーとアラーム:
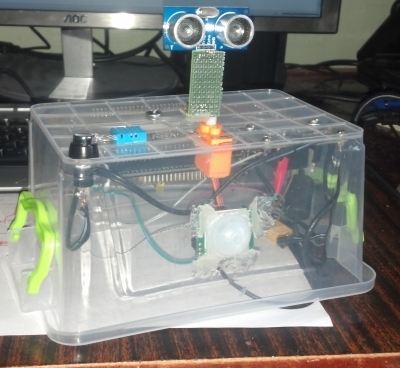
一般的なビュー:
アンドロイド用の新しいプログラムも作成され、ボタン制御を拒否しました。
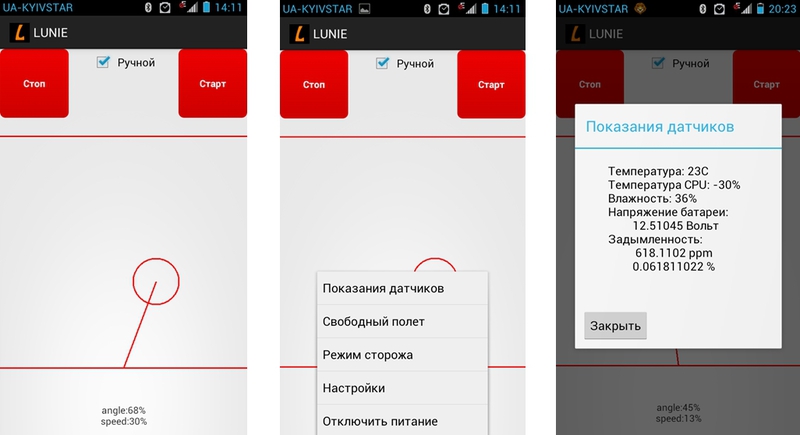
赤い丸はタッチの場所です。 指の上下の動きは、トラクションモーターの速度と左右方向を制御します。
結果のデモンストレーション:
動作モードについて:
-「ウォッチマンモード」-ロボットは可視ゾーンに人が現れるまで待機し、その後コントロールパネルに信号を送信します。
-「ステップバイステップモード」-ロボットは、その前のスペースで超音波センサーをスキャンします。その後、ルートを選択し、それに沿って移動を開始します。
-「手動制御」-ロボットはリモートコントロールから完全に制御され、動作の調整は行われません。
-「半自動モード」-ロボットはリモコンから制御されますが、動作中の飛行を調整します。
あとがき
このSVPを作成することは主に興味深いことでしたが、ロボットとして使用すること(そしてこれが私たちの目標でした)は疑わしい喜びです。 このロボットはアパートにはうるさいですが、庭を走り回ることはできません。 ただし、このプロジェクトで組み立てられた制御システムは、車輪付きロボットまたはトラック付きロボットでさらに機能します。さらにエンジンを追加すると、クアッドコプターを作成できます。
UPD:SVP パート2