詳細がテーブルにレイアウトされ、組み立てが開始されます。 注文は長続きしませんでした...

開始するために、22cmと28cmの希望する長さのチューブを見ました。4つすべてが1メートルのチューブから切断されました。 細い歯の金属のやすりは非常にうまくいきます。

下部中央のクランプを試してみます。

センターは、すべてが適切に適合するかどうかを確認するために組み立てられます。 そうそう。

フレームの他のすべての部品をねじ込みます。 ほぼ完了したように見えますか? どんなに。

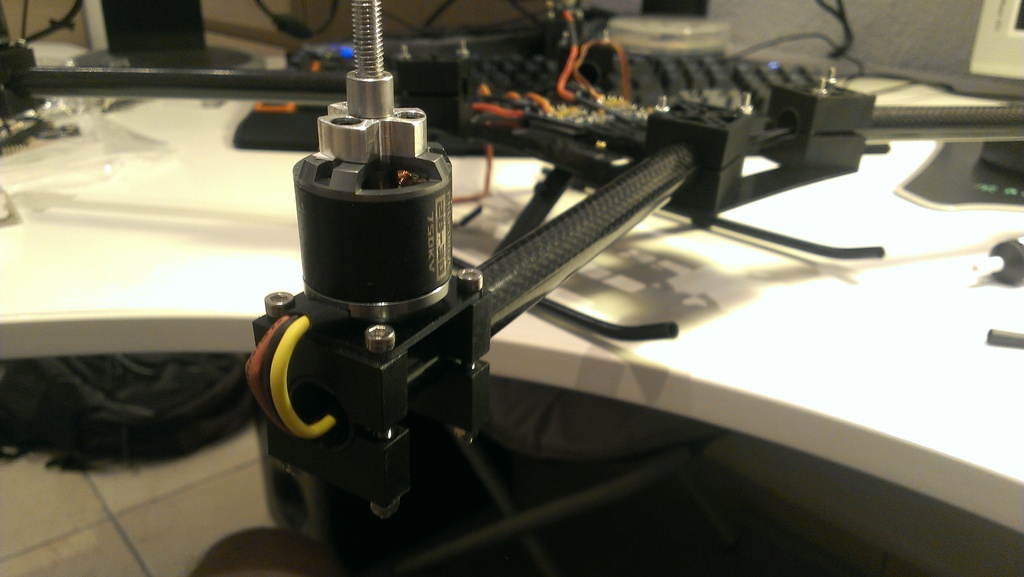
モーターの軸は切断する必要があります-それらは背面から突き出ており、チューブの上部への取り付けを防ぎます。 金属のおがくずが内部に入るのを防ぐために、モーターをダクトテープで接着します...

...そして彼のドレメル、ドレメル。 ドレメルは、バターナイフのように3mmの軸を切断します。 主なことは、安全メガネを忘れないことです。

モーターコントローラーから熱収縮を取り除き、新しいワイヤーをはんだ付けします。
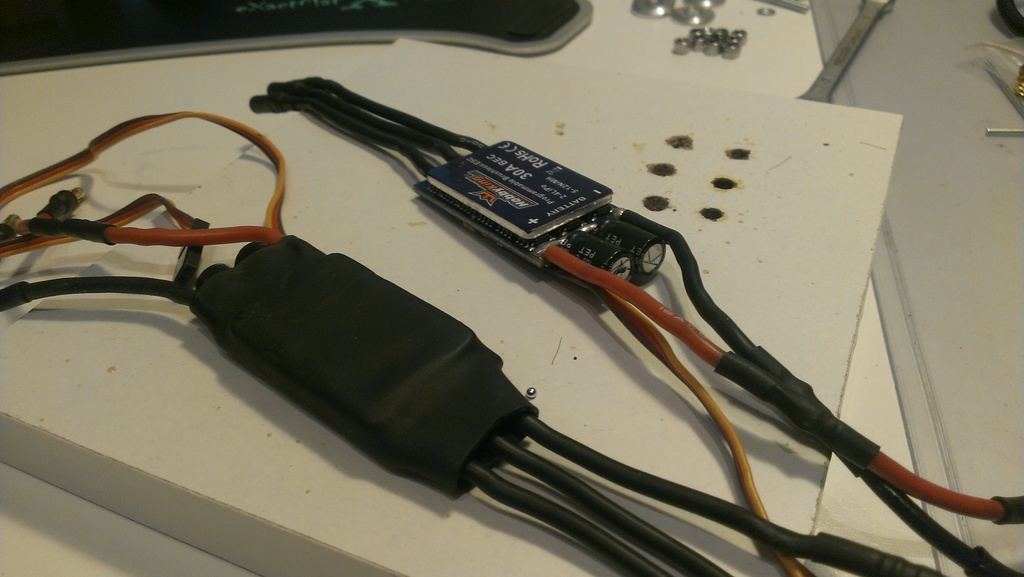
ワイヤーは希望の長さにカットされます。 モーターコネクタをはんだ付けします。 モーターごとに3つのフェーズがあり、dofigaをはんだ付けする必要があります-これはクワッドです。

コントローラーを下半分のフレームに配置します。
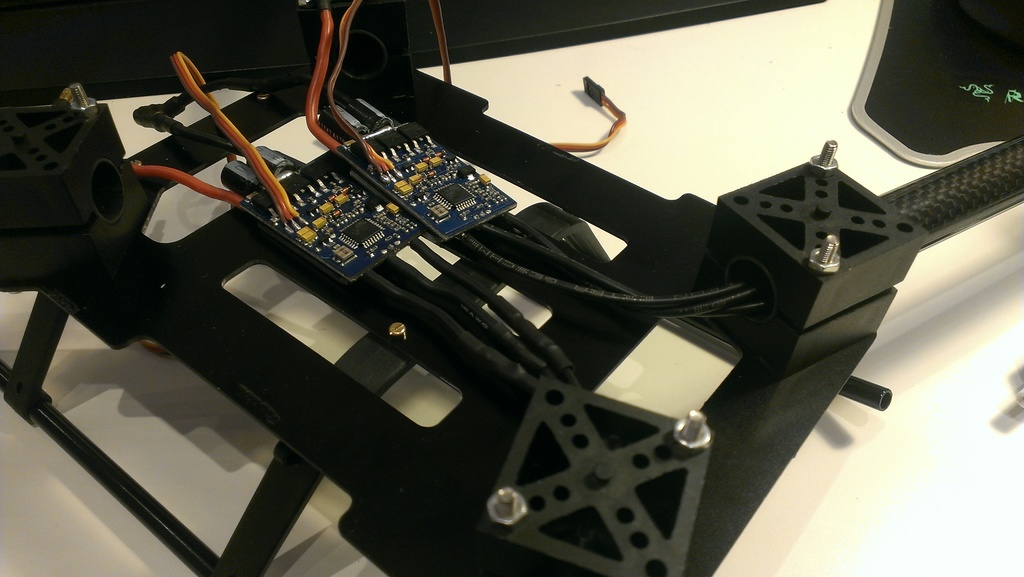
モーターを固定し、ケーブルをチューブに通します。 すべてが計画通りに進んでいます!
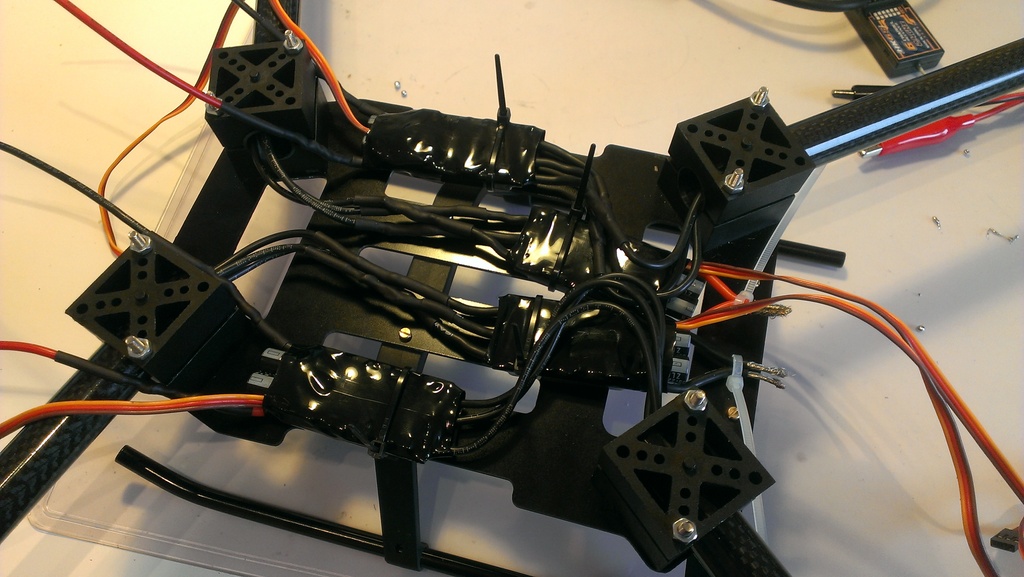
すべてのケーブルが配置されたら、新しい熱収縮でコントローラーを隔離します。

最終位置にモーターコントローラーを設置します。 配線が多すぎますが、かなりきれいです。
バッテリー配線、RCExplorerメソッド。 まず、バンドルを使用してコントローラーからワイヤーを収集します...
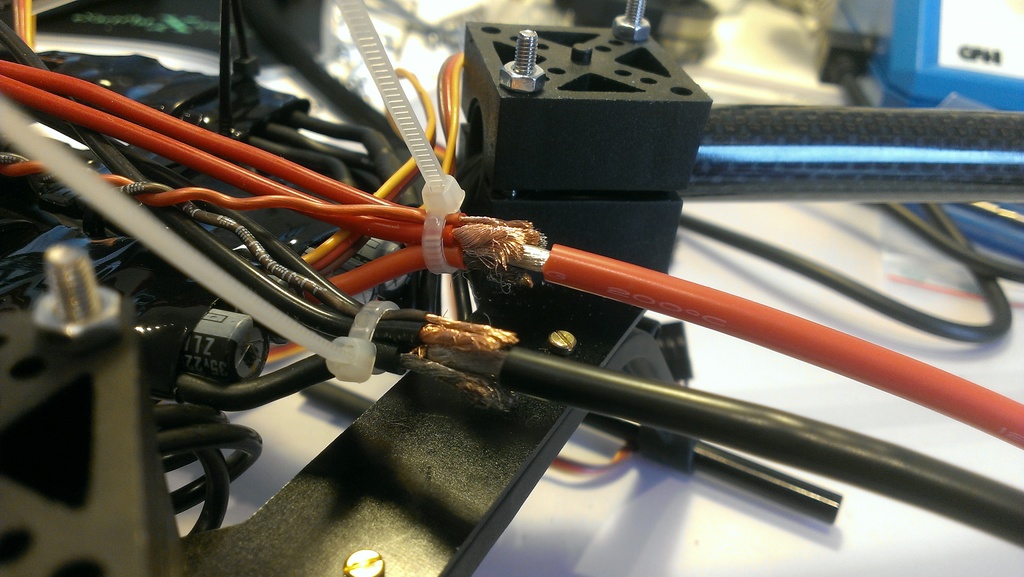
...細い銅線で一緒に引っ張ります...
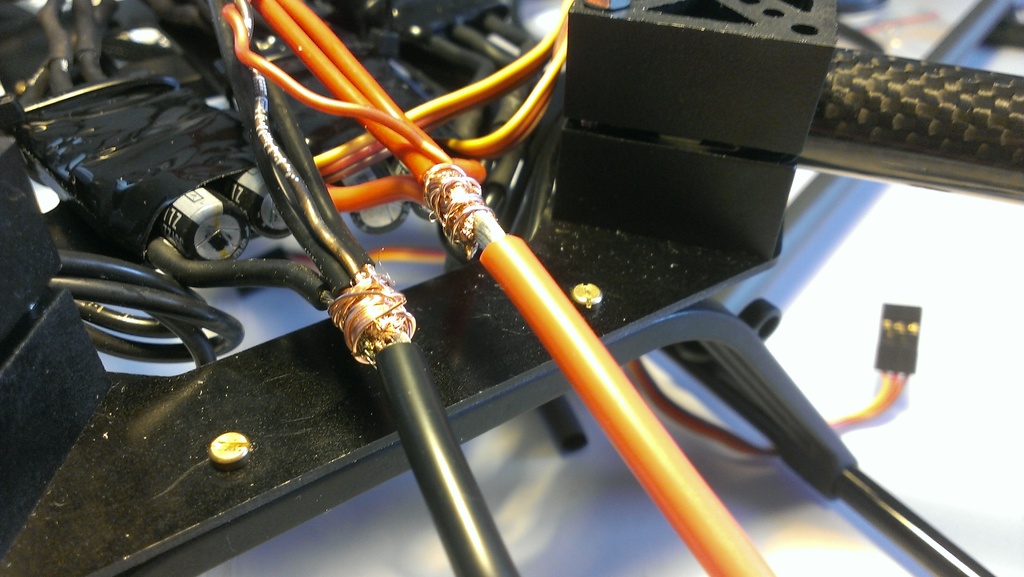
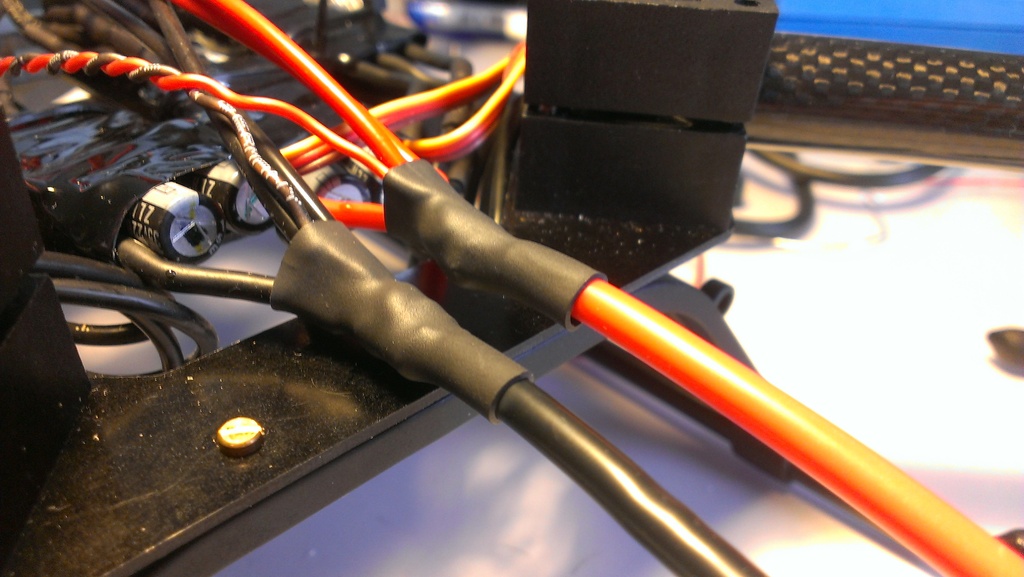
...はんだ付けし、熱収縮で絶縁します。 化合物は機械的に強く、導電性が高い。
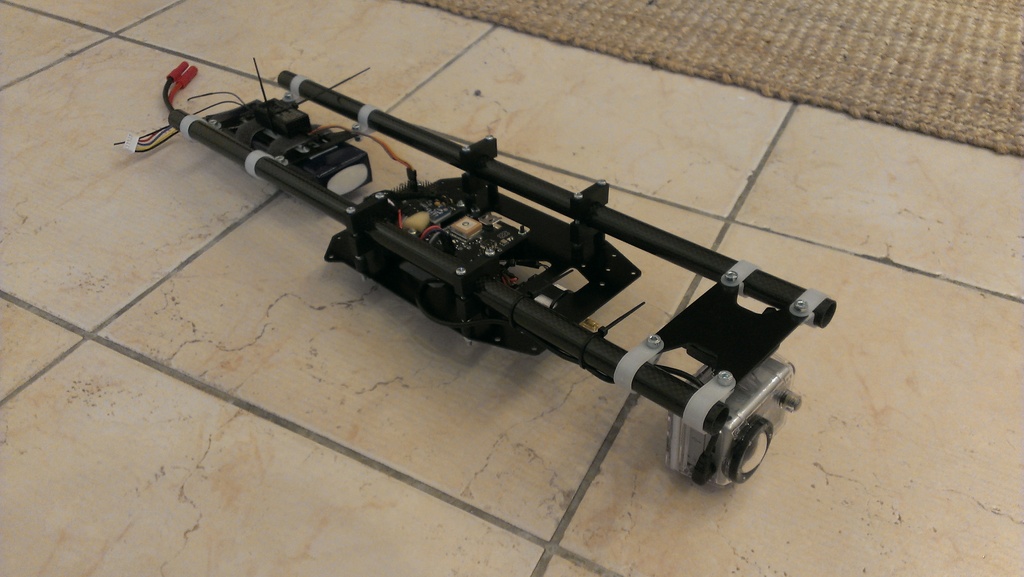
最終組み立てを試みます:すべてが一致します! 上部フレームはまだねじ込まれておらず、ちょうど上にあります。

中央に制御電子回路(コントローラーとGPS)があり、カメラとバッテリーが取り付けられた防振チューブを備えた上部フレーム。
上部中央の下側のビデオ機器:カメラからのビデオケーブルはMinimOSDに行き、そこでフライトコントローラーからの情報がビデオトランスミッターに重ねられます。
下部フレームは上部を取り付ける準備ができています。 一時的なナットを緩めたときに中央のクランプがバラバラにならないように、モーターを上げます。

上半分のフレームを取り付けて固定します。 ナットを締め、すべてのワイヤーを接続して......

...完了!