 ドローンを開始位置に設定する1年前、飛行ロボットのコンテストは賞金100万ルーブルで始まりました。 最初は536個のアプリケーションがありました。
ドローンを開始位置に設定する1年前、飛行ロボットのコンテストは賞金100万ルーブルで始まりました。 最初は536個のアプリケーションがありました。 最初のコントロールポイントには237人、2番目には204人、3番目には72人が参加し、29人の最強の参加者が決勝に到達しました。 しかし、14チームと4人の参加者のみが8月24日と25日にKROKトレーニンググラウンドに到着し、賞のために戦った。 18台のドローンの最終飛行の合計時間は約5時間です。 タスクは、テイクオフマーカーからランディングマーカーまで小さな迷路を自動的に飛行し、座ってから戻り、途中で棚の障害物の周りを飛行することです。
最もつらいことは、先週、「これで終わりです。」という件名の手紙を読むことでした。 ロボットをクラッシュさせた。」 最も楽しいことは、最初のチームが期待したトレーニングのレベルをどのように示したかを確認することです。
そして、はい、
写真レポートの下
-慎重に、トラフィック 。
 雨の中を飛んだ
雨の中を飛んだ  初日を開きます。 左から右:審査員のVitaly Polyansky(モスクワ航空研究所のロボティクスおよびインテリジェントシステム学部の副科学部長)、次にIとAlexey Dobrovolsky(CROCソフトウェア開発部長)。
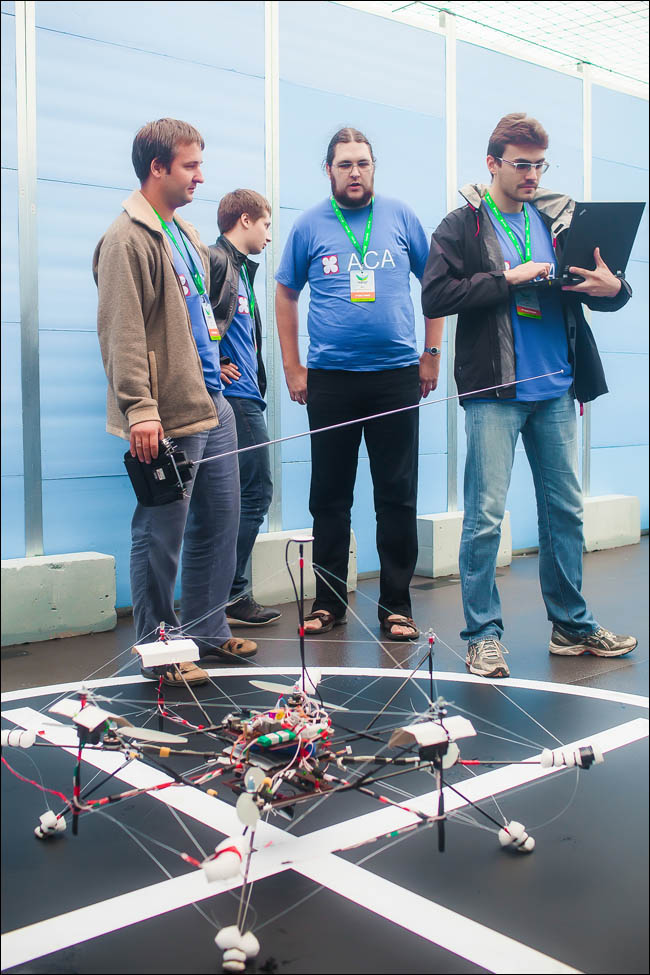
初日を開きます。 左から右:審査員のVitaly Polyansky(モスクワ航空研究所のロボティクスおよびインテリジェントシステム学部の副科学部長)、次にIとAlexey Dobrovolsky(CROCソフトウェア開発部長)。 飛行前のチューニング
飛行前のチューニング 開始マーカーへのインストール
開始マーカーへのインストール前のシリーズを逃した場合
ここで
コンテストについて話し、ここで
ロボットをどの
ように組み立てたのか 、そして一度飛んだときの難しさ
について話しました。
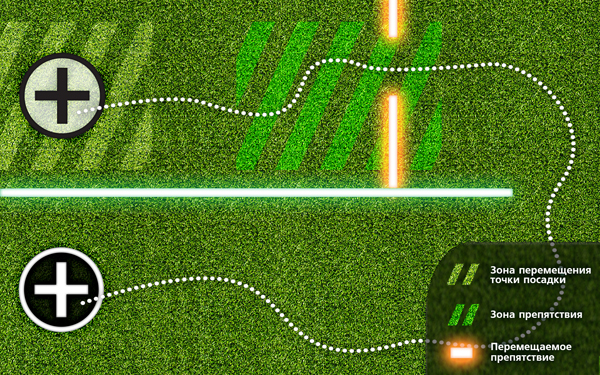 ポリゴンレイアウト
ポリゴンレイアウト私たちのチームは、通常のプロジェクト以外のロボット工学の方向で経験を積むために行ったロボットとの競争の最後の日の間に飛びました。 私の話は参加者の視点からです。 そして、おそらく、私はフライトのエラーに最も注意を払います。そのようなことを知ることは非常に便利です。
 参加者は開始の準備をしています
参加者は開始の準備をしていますフライトは2日間で、アドレナリンはただの海でした。 これらの最終便に参加した参加者とその結果は次のとおりです。

 外側のポリゴン壁
外側のポリゴン壁 迷路の様子
迷路の様子 競技開始前の眼鏡
競技開始前の眼鏡カメラでの飛行
そのため、最初の2engineersチームは最初の段階で素晴らしい飛行を見せました。 彼らは時計仕掛けのように半分歩き、最初の飛行を破って最初のトライで競技会に参加することからわずか半歩離れていました。 彼らは厳密にカメラに飛びました。 アルゴリズムは、理想的なグライドパスで最大速度でターンに入り、マーカーをすぐに認識し、しっかりと座ったが、戻り時にパーティションに衝突するようにドープされました。 彼らは特定のポリゴンのアルゴリズムを完璧に研ぎました。 防止したことは理解できません。 ある種の影はランダムかもしれませんが、パーティションのすぐ後ろにロボットが落ちました。 残念なことですが、事故の後、ロボットは2回目の試行でも離陸しませんでした-何かが内部に落ちました。
「トレーニング場でのロスト」
Robodemチームのロボットは素晴らしく飛行し、マーカーを見つけて非常に正確に着陸することも素晴らしかったです。 彼らは、試験飛行であっても、予定よりも早く4番目のコントロールポイントを通過した唯一の人たちです。 決勝の数ヶ月前、ロボットは床に描かれた8の字に沿ってスムーズに歩きました。 しかし、決勝でわずかな認識の問題があったため、彼は3回フィニッシュグラウンドに座って壁を振り返り、このマーカーに戻り、再び飛び去ろうとしました。 6分後、彼はまだ「トンネルの終わりにある光」を見、ターンを見つけ、開始マーカーを見て、その上に座った。
Wi-Fiの問題
参加者の約半数で、ロボットは機内のすべてをカウントしませんでしたが、Wi-Fi経由で写真をラップトップに転送しました。 問題は、参加者の誰もが、Wi-Fiネットワークが周囲の都市ネットワークからの多くの自然なトラフィックでうるさいとは思っていなかったことでした(干渉なし、私たちはそれを見ました)。 たとえば、すべてのArDroneヘリコプターは、ビデオストリームを「地上」に送信し、リモートコントロールから「サーバー」からコマンドを受信しました(結局、小さなロボットで、プラットフォームが閉じているため、あまり多くのことはありません)-ここで参加者は遅れを待っていました。 たとえば、最初のWi-Fiチャネルは8〜9のホームネットワークとオフィスネットワークを占有していました。
その他の問題
- Railab(Polytechnic Museum)は順調に飛行しましたが、戻ることができませんでした-バッテリーが予期せず故障し、ロボットが少し飛ぶことができませんでした。
- 航空エンジニアリングは、テスト飛行中に優れた技術的基盤を示しましたが、プロペラグループによってまだ失望し、ファイナルに参加できませんでした。 しかし、よくやった、彼らは彼らの装置で観客として到着しました。
- 「IKar」は埋め立て地を大きく移動しましたが、着陸地点の認識により突然失望しました。 おそらく、彼は915 MHzの周波数で無線リンクを介して送信された認識結果に関する情報を持っていたという事実のためです。 屋根に基地局の無線中継装置があるため、このチャネルに干渉が発生する可能性があります。 間違っていなければ、彼らのロボットは別の送信機でデバッグされており、新しい送信機はその場でテストされていません。
- 磁力計、つまりコンパスに導かれた人は誰でも、建物の鉄筋コンクリート構造のために問題を抱えていました。 残念ながら、競技開始のずっと前に誰もがこれを理解していなかった。 ロボットは、最も近い壁に直接飛行することで試行を完了しました-方向の障害が影響を受けました。 一方、ここでは、たとえば、「ユニバーサルメカニズム」は、ジャイロスコープ上で純粋に、非常に正確に飛行しました。
- ウラジオストクのチームは、最初の試行でロボットを空中に持ち上げることができず、2度目も試行しませんでした。 理由を挙げることはできませんが、どうやらすぐに修正できないことに気付いたようです。
- テスト飛行のアードロン「ユニバーサルメカニズム」は、5回のテスト飛行のうち5回を正常に完了し、2分半以内にほぼ完璧な結果を示しました。 しかし、競技会では、最初の飛行のチームは訓練場の湿度のために失望しました。これにより、光学走行距離計が失敗し、2回目ではドローンと地上局の間のWi-Fi接続が不確実でした。 これらの問題は両方ともテスト飛行では発生しませんでした。
- 雨が降った後の舗装のグレアの可能性は、ソナーではなくオプティカルフローで飛行した人々を混乱させたようです-鏡の中の光学式マウスを運転しているようなものです。
私たちの飛行
おそらく私たちのロボットについて少し話す価値があるでしょう。 私たちのチームは競争を超えました。なぜなら私たちの会社はそれを組織したからです。 私たちは3つの重要な制限を設定しました(それらは部分的に複雑です):
- アルゴリズムは徹底的に研ぎ澄まされるべきではありません。普遍的な方法で問題のクラスを解決する必要があり、これは特にそうではありません。
- GPSなし:信号が歪んだり、存在しないロボットが将来使用されることを想定しています。
- すべての計算はロボット上で実行する必要があります(地上局と通信せずに作業し、単一の信号のみがロボットから送信されます-開始まで)。
 私たちです
私たちです これが私たちのロボットです。
これが私たちのロボットです。8個のバッテリー(幸いなことにそれを買う余裕はありました)、親愛なるLIDAR、そして念のため、テストで最初の1個を破壊した場合に軌道に乗るために必要な2番目のロボットがありました。 トーナメントの前の最後の実行では、私たちのドローンは迷路を飛び、3.58分から4.2分の間安定して戻ってきました。 私たちは、彼とのすべてが素晴らしいものになると確信していました。
驚いたことに、最初の試みは完全に失敗しました-ロボットはどこにも飛んでいませんでした。
試行間の間隔で判明したように、理由は完全に平凡です-データ伝送チャネルの複製を提供しませんでした。 すべてのデータ処理はボード上で行われるため、ロボットはコマンドを送信するだけで開始できます。 後になって、彼からテレメトリーを入手します。 最初の試みに来たとき、私たちは絶対に準備ができていると考えました。 ロボット上のすべてのソフトウェアが起動され、ラップトップ上のソフトウェアが展開され、ルーターがオンラインになりましたが、何らかの理由でラップトップからロボットへのコマンドが送信されませんでした。 2台目のラップトップまたはリモートがある場合は、それらから緊急にコマンドを送信します。
2回目の試行では、ラップトップを再起動した後、ロボットは正常に飛行しました。
4分1秒で飛びました。
こちらがフライト初日のビデオです-
2:09:45-成功した試みライダーが壁に到達しなかったため、オプティカルフローセンサーでどのように苦しめられていたのかを書いていました。 飛行前のテストでは、ライダーはテストサイト全体で十分であり、オプティカルフローは単に必要ないことが判明しました。 LIDARはより正確な測定値を持っています。それで十分です。
また、アルゴリズムにも問題がありました。異なる種類の照明にとって非常に重要です。 つまり、明るい太陽が輝いて壁に落ちると、ターゲット自体よりも明るくなります。 ロボットが壁に衝突するのを防ぐために、認識の際に考慮せずにそれらを破棄するようにアルゴリズムを修正しました。 テストでは、ロボットに多くの明るい物体を中に対照的な物体を入れて見せようとしました-彼は、例えば、3つのターゲットを見、空中で止まり、2つが消えるのを待ちました。 その結果、多かれ少なかれ実用的なパラメーターが得られるまで、光学入力フィルターを使用しました。
ロボットがすでに競争力のあるタスクを実行できることを確認したら、タスクを複雑にしました。トレーニング場に追加のパーティションを設置し、人の形で現れる障害物の周りを飛行する実験さえしました。 さらに、私たちは自分の能力に非常に自信を持っていたので、接近するロボットに背を向け、それが私たちを取り囲むまで待っていました。
それについてのビデオはここにあります。 追加のパーティション:
そして、私たちは追加の障害の形をとっています:
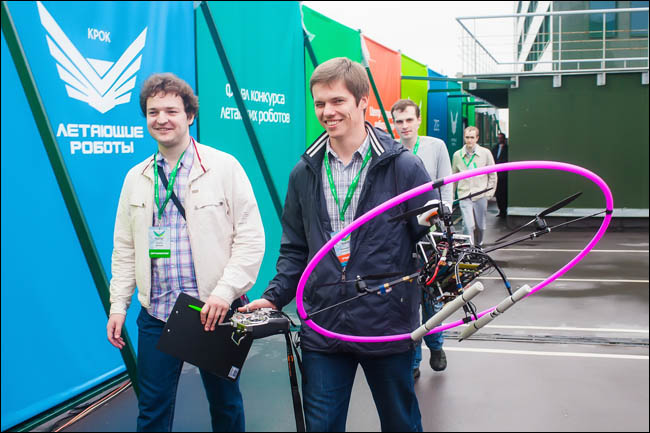
 フライトの直前に、このようなフレームを拒否しました。非常に重いです。 しかし、彼らはフラフープから素晴らしいキットを思い付きました。それは、ちなみに私たちを救ってくれました-壁に少し触れました。 はい、これはすべてのフライトでドローンが何かに触れたのは初めてです。 また、事故。
フライトの直前に、このようなフレームを拒否しました。非常に重いです。 しかし、彼らはフラフープから素晴らしいキットを思い付きました。それは、ちなみに私たちを救ってくれました-壁に少し触れました。 はい、これはすべてのフライトでドローンが何かに触れたのは初めてです。 また、事故。 そしてここで私たちはロボットと予備のフレームに満足しています。
そしてここで私たちはロボットと予備のフレームに満足しています。一般的な印象
トーナメントの前の最後のテストでは、すべてのチームがお互いに対して非常によく配置されていて、非常に冷静に情報を共有していたことを非常に嬉しく思いました。 誰かが、たとえば、マーカーを探すときに余分な方向転換をしないように、ヘリコプターをヘリコプターの背面に置くことを勧めました。 チームの1つは、ファイナルの前にこれを実現しました。
テスト飛行の2週目はすべてぎゅうぎゅう詰めでした。 私たちのトレーニング場は公式には10:00から20:00まで働いていましたが、ほぼ毎日午後10時まで飛行し、トレーニング場には一度に5つのチームがいました。

 たくさんの女の子がいました
たくさんの女の子がいました 注意してください、すべて肯定的であるもの
注意してください、すべて肯定的であるもの距離を置いて歩いた人は、既製のArDroneを備えたコンピュータと、ビデオストリームを処理するための強力なアルゴリズムを備えた既製のArDroneと、さまざまなセンサーを搭載したカスタムソリューションの半分に等しく分けることができます。
一般的に、ロボットの動作のコンピューターモデリングに夢中になっていたチームが最高のパフォーマンスを発揮しました。 これらのチームは、ロボットを壊すことなく、トレーニンググラウンドに到達することなく、ナビゲーションアルゴリズム、認識をデバッグする機会がありました。 シミュレーションに手書きのシミュレーターを使用した人もいました。 これは2engineersチームです。彼らは独自のシミュレータを作成して開発しました。彼らはゲーム開発者です。 このシミュレーターを見せられたとき、私は最初に次のように言ったのを覚えています。「いいえ、なぜカメラのビデオを見せてくれますか? シミュレーターを見せてください。」 そして、彼らは「これがシミュレーターです」far遠くから見ると、ロボットが実際にカメラから送信するものと区別できませんでした。 到着したばかりで、埋め立て地をカメラに持って行き、すべてのテクスチャをモデルに配置しました。 そして、これで彼らはすでにクレイジーなターンと認識アルゴリズム、そしてすべてすべてをデバッグしました。
多くの人は、試行の間にコードを追加したり、パラメーターを変更したりしました。 私たちは彼らに警告し、何も触らないで、同じものをもう一度試すように頼みました。 最善は善の敵です。これはまさにそのケースです。1行のコードで修正する価値があり、すべてが壊れます。 結局のところ、あなたが何をしたかを確認し、一般的に理解する時間はありません。
 フロントで
フロントで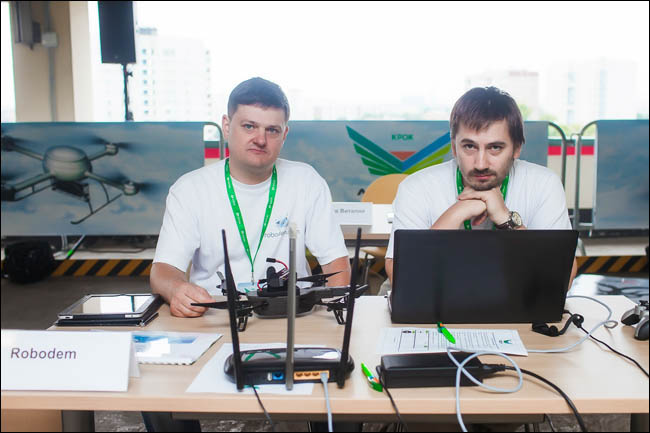 フライト前の優勝チーム、まだ真剣で、すべてがどうなるか心配
フライト前の優勝チーム、まだ真剣で、すべてがどうなるか心配 航空工学チームと最後の瞬間に失敗したロボット
航空工学チームと最後の瞬間に失敗したロボット 最後の数日間の天気は私たちを失望させ、ラグで自分自身を暖め、どうすればできましたか)
最後の数日間の天気は私たちを失望させ、ラグで自分自身を暖め、どうすればできましたか) 飛行オランダ人と呼ばれるASAチームロボット
飛行オランダ人と呼ばれるASAチームロボット ASovtsovの1つが起動パッドにロボットをインストールします
ASovtsovの1つが起動パッドにロボットをインストールします そして、2エンジニアはスタートボタンを押す準備をします
そして、2エンジニアはスタートボタンを押す準備をします これは個人の参加者であるVitaly Agalakovです。 残念ながら、タスクだけに対処するのは簡単ではありませんでした。
これは個人の参加者であるVitaly Agalakovです。 残念ながら、タスクだけに対処するのは簡単ではありませんでした。 どうやら、Railabチームによると、目を持つロボットのほうが飛ぶようです。 ほとんど助けた:)
どうやら、Railabチームによると、目を持つロボットのほうが飛ぶようです。 ほとんど助けた:) ファンは雨休み中に日光浴をしています
ファンは雨休み中に日光浴をしています UNIONチームのキャプテンは、3番目のコントロールポイントの結果に続く最高のビデオプレゼンテーションのために、私たちからラップトップを受け取りました。 聴衆によって選択されました。
UNIONチームのキャプテンは、3番目のコントロールポイントの結果に続く最高のビデオプレゼンテーションのために、私たちからラップトップを受け取りました。 聴衆によって選択されました。 ハチドリロボット
ハチドリロボット そして、参加者自身が、コンテストの情報パートナーの多くのロゴを備えたプレスウォールでロボットを使用します
そして、参加者自身が、コンテストの情報パートナーの多くのロゴを備えたプレスウォールでロボットを使用します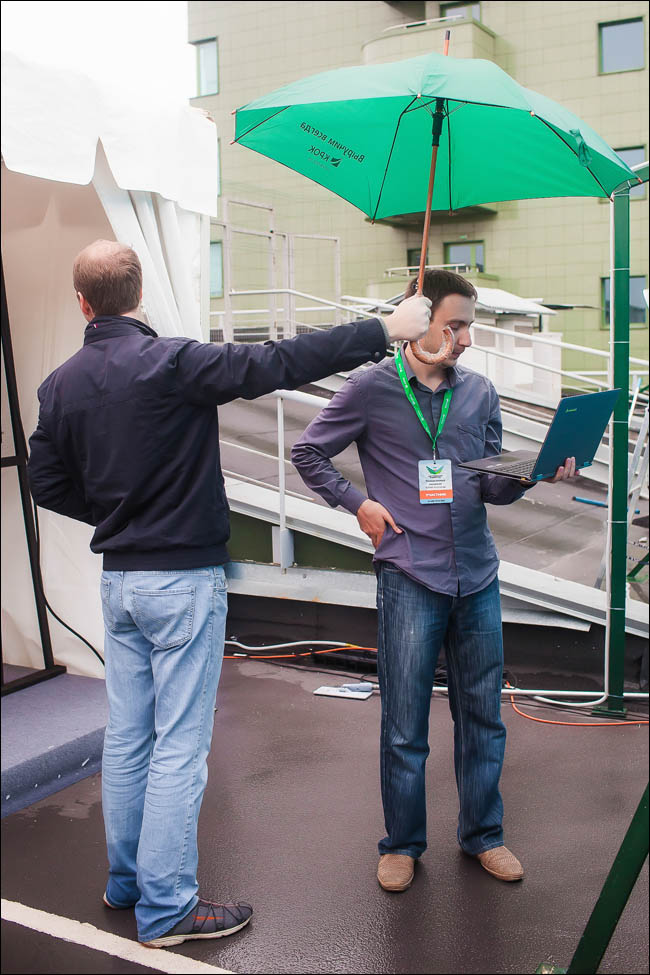 雨から身を守るための操作
雨から身を守るための操作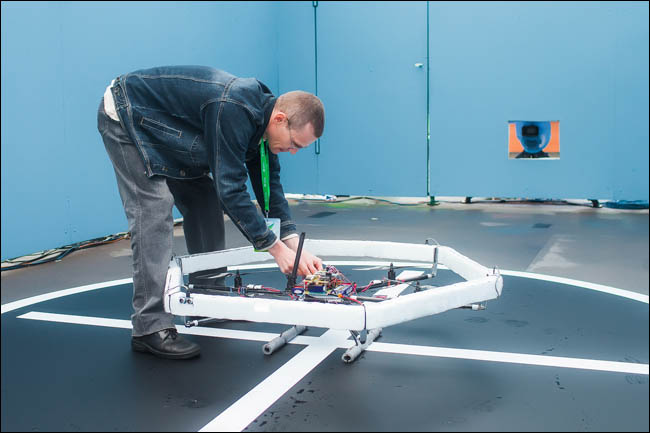 iKarの参加者が「オランダ人」を設定します
iKarの参加者が「オランダ人」を設定します 「AAロボット」チームのドローンと訓練場での思い出の写真
「AAロボット」チームのドローンと訓練場での思い出の写真 ウラジオストックから飛んでいないゲスト
ウラジオストックから飛んでいないゲスト チーム607は当時の晴天からロストフオンドンに直接来ました
チーム607は当時の晴天からロストフオンドンに直接来ました チーム3男1ボット、決定的な試みの前の最後のシャーマニズム
チーム3男1ボット、決定的な試みの前の最後のシャーマニズム結果
ここでは
、ファイナルに達した人について詳しく説明し
ます。 これらのうち、10人はモスクワとその地域の代表者であり、北部の首都ブリャンスク、クラスノヤルスク、トムスク、カザン、ロストフオンドン、ビースク、ウラジオストクからそれぞれ1人です。
そして、これは、モスクワ航空研究所(MAI)の教授「ロボットおよびインテリジェントシステム」の学部長の科学的作業の副部長である、ヴィタリーポリヤンスキー競技会の最終日の審査員のコメントです。
「私は長年にわたって無人システムの分野で仕事をしており、中学校やモスクワ航空研究所でロボットクラブを組織しています。 しかし、私が偶然審査した最後のフィナーレは、本当に驚きました。 参加者は、ロボットの開発と教育機関での主な活動および専門的な仕事を組み合わせて、1年にわたってヘリコプターのリモートコントロールによって伝統的に制御される完全に自律的なドローンを作りました。 また、ロボットをゼロから作成し、独自のデザインを作成することもありました。 そして、これはすべて熱意だけです! 彼らの目は燃えている、それは競争が無駄ではなかったことを意味する。」
賞金はセルギエフ・ポサドのロボデム・チームが獲得しました 。 勝者のドローンは、6分45秒で競技タスクを完了しました。
32:20から始まるフライトの最初の日の同じビデオで、彼らの勝利したフライトを見ることができます:
ここでは、フライトの2日目の
ビデオを見ることができます。
これらのビデオはオンラインで見ることができ、両方の日に放送があり、その間にほぼ2,000人がコンテストを見ました。 ここで、たとえば、最初の日の統計:

 飛行後の受賞者
飛行後の受賞者