数か月前、私はここで自分の重いクワッドについて書きました:
one 、
two 。 読んでコメントしたすべての人に感謝します-私のささやかな仕事がそんなに多くの読者を引き付けるとは思っていませんでした。 しかし、このトピックはHabrの視聴者の興味を引くと思われるため、先日完成した軽量のFPVトリコプターという最新のプロジェクトについてお話しします。

タスク
このヘリコプターでは、次のタスクを自分で設定しました。
- 高い機動性:私のクワッドは不器用ではありませんが、重量が2.2 kgで、前部の比較的壊れやすいサスペンションに高価なカメラが搭載されていますが、曲技飛行はどうにか上昇しません。 私は、考えずに樽の周りをひねり、木の周りをループできるヘリコプターが欲しかった。
- 耐衝撃性:要件は最初の要件に直接関連しています。 木に予期せぬ植え付けをするたびにヘリコプターを修理することは長い間重要ではありません。デバイスは打撃を保持する必要があります。
- 飛行時間:少なくとも10〜15分、バッテリーをより頻繁に交換することはすでに面白くない。
- 軽量:この要件は、前の3つに基づいています。 ヘリコプターが軽くなればなるほど、飛行方向を変更しやすくなり、何かとの衝突のエネルギーが少なくなり、1つのバッテリーで空中に長く垂れ下がります。
- コンパクトさ:公共交通機関やハイキング旅行で簡単に持ち運べるように、バックパックに収まるデバイスが必要でした。
これらの要件に基づいて、私は再びLibreCadで座って、これを描きました:
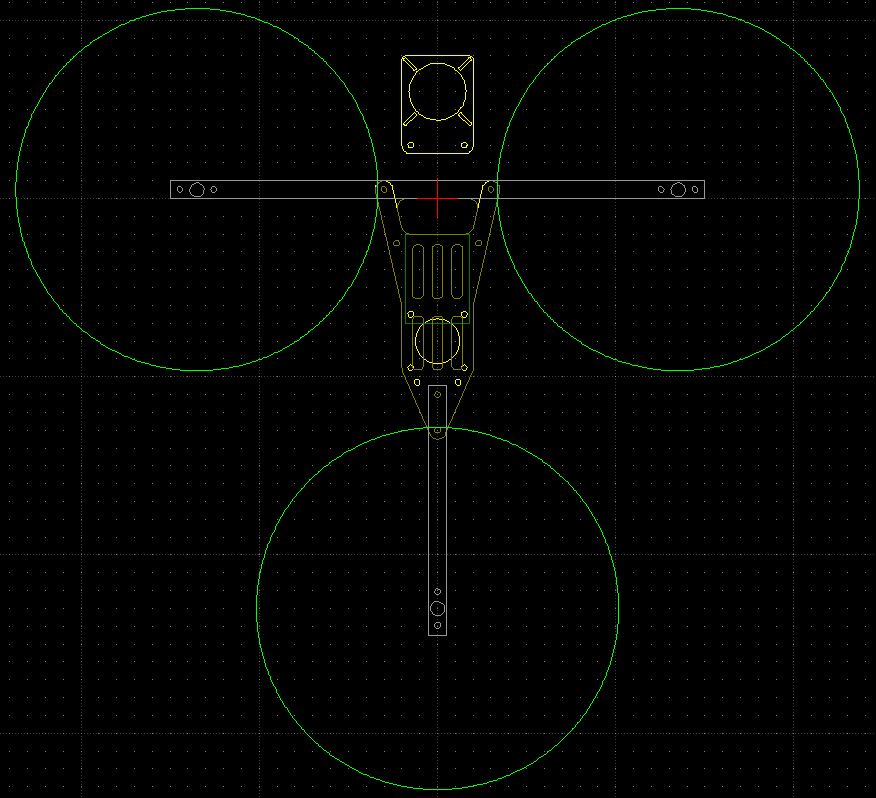
寸法:フロントモーター間の距離は27cm、プロペラの直径は8インチです。
なぜトリコプターなのか?
トリコプターは、かなり珍しいマルチローターです。 プロペラが3つしかない場合、クワッド、ヘックス、オクト、その他のヘリコプターで行われるように、反対方向に回転するペアを使用してトルクを補償することはできません。 代わりに、トリコプターでは、後部ローターを傾けるメカニズムが使用されます。これにより、後部ローターが推力ベクトルを垂直から偏向し、ヨーを制御できます。 私のプロジェクトにおけるこのスキームの利点:
- ヨー軸に沿った操縦性の向上。通常のヘリコプターでは最も遅く、不正確です。
- 3つのモーターのみを使用することによる軽量化
- フロントローター間の距離が長いため、プロペラがヘリコプターの中心から遠くに移動することなく視野に落ちないようにカメラを配置できます
欠点は、機械的な複雑さが増すことです。リアモーターを取り付けるにはヒンジが必要であり、それを制御するにはサーボドライブが必要です。
テクニック
私はフライス盤で切断されたアルミプロファイルとグラスファイバープレートからフレームを組み立てることにしました。 アルミニウムはこのサイズのヘリコプターに絶対に十分な剛性を与え、この設計は非常に軽量です。 次に、次の電子部品を取り上げました。
| モーター: | Suppo A2208 / 17 1100KV | 3x €13.95 |
|---|
| プロペラ: | Flyduino HQ 8x5 CF強化(Graupner E-Propクローン) | €7.80 |
|---|
| 規制当局: | ブルーシリーズ12A | 3x $ 10.02 |
|---|
| バッテリー: | Zippy Compact 3S 2200mAh 25C | 13.17ドル |
|---|
| サーボドライブ: | Turnigy TGY-9025MG | 5.04ドル |
|---|
| FPVカメラ: | ソニーSuper HAD II 600TVL | 〜45 $ |
|---|
| FPVトランスミッター: | Iftrontech Nano Stinger 5.8G 25mw | 〜100 $ |
|---|
| OSD: | ミニモス | 〜20 $ |
|---|
レギュレーターを
SimonKファームウェアでフラッシュしました-コントローラーによる設定速度の変化に対するモーターの反応速度を大幅に向上させ、入力信号の高いリフレッシュレートをサポートし、一般的にそれをサポートするレギュレーターのヘリコプターの必須アイテムと考えられています
どこでも販売できる適切なチルトメカニックが見つからなかったので、自分でやることに決めました-最近、3Dプリンターへのアクセスができました。 FreeCADで夕方のことを考えて、次の詳細を描きました。
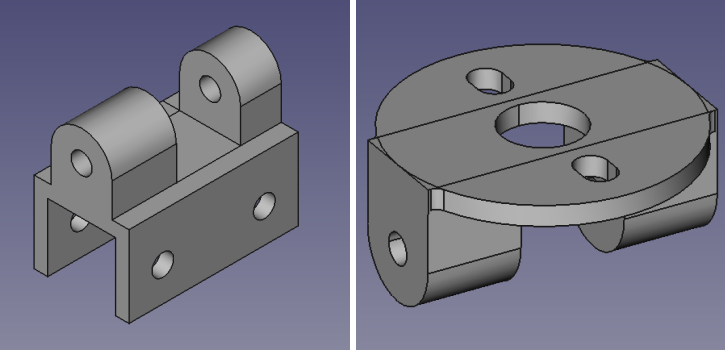
その結果、10mmの角パイプに取り付けられたヒンジ、3mmの軸用の穴、および標準の穴が付いたモーター用の取り付け台ができました。
コントローラー
このヘリコプターのコントローラーの選択は、かなり珍しいオプション-Naze32にも依存しました。
 (私が使用しているFlyduino MW32のクローンが表されています)
(私が使用しているFlyduino MW32のクローンが表されています)Naze32は、基本的に最新のハードウェア用のMultiWiiポートです。 32ビットSTM32F103プロセッサ、ジャイロスコープ、MPU6050加速度計(追加の加速度計MMA8452もインストールされ、一部のソフトウェアバージョンではMPUの代わりに使用されます)、MS5611気圧計、HMC5883L磁力計を使用します。 なぜこのオプションを選択したのですか:
- 計算能力-ほとんどのコントローラーは8ビットATMegaチップをベースにしており、その能力は多くの高度な機能に十分ではなくなり、将来は容易になりません。 古いハードウェアに制限されることなく、将来的に新しい機能を備えたソフトウェア更新プログラムを受け取るコントローラーが必要でした。
- MultiWiiベースのオープンソースソフトウェア-ドイツのフォーラムFPV-Treffで書かれたHarakiriと呼ばれるベースNaze32ソフトウェア(BaseFlight)のフォークを使用することにしました。 MultiWiiをベースにした、軽度の機動性の高いヘリコプターに最適ですが、コードに煩わしさを必要とせず(設定全体はコマンドラインとMultiWiiの標準GUIを使用して行われます)、帰宅などのGPS機能を完全にサポートします。
- オープン通信プロトコルMultiWiiおよびMAVLinkのサポート-MinimOSDを使用するために重要です。
- 最後になりましたが、コントローラーのサイズ。 すべてのセンサーは35x35mmサイズのボードに配置されますが、必要最小限のコネクタがあり、すでに小型ヘリコプターのスペースと重量を節約しています。
GPS受信機私は通常のuBlox CN-06(約50ドル)を受け取りました。 軽量のMediatekモジュールでは10gに制限されていたかもしれませんが、はるかに遅く、それほど正確ではありません-帰宅機能などの優れた機能では、精度と更新速度が重要であるため、どこでもuBloxを使用することをお勧めします。
部品の準備
まず、フレームとリアモーターを傾ける機構用のプレートを作成しました。
フレーム
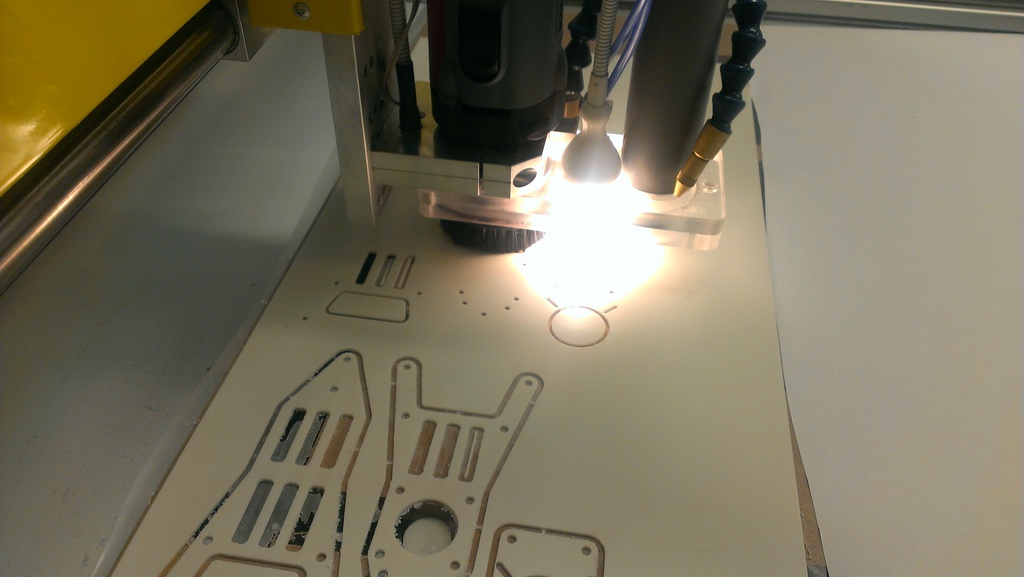 フライス盤がプレートを輪郭に沿って切断します。 以下は最初の失敗した試みです。 ヒント:マシンソフトウェアで2 mmミルが選択されている場合は、マシンにインストールされていることを確認してください:)
フライス盤がプレートを輪郭に沿って切断します。 以下は最初の失敗した試みです。 ヒント:マシンソフトウェアで2 mmミルが選択されている場合は、マシンにインストールされていることを確認してください:)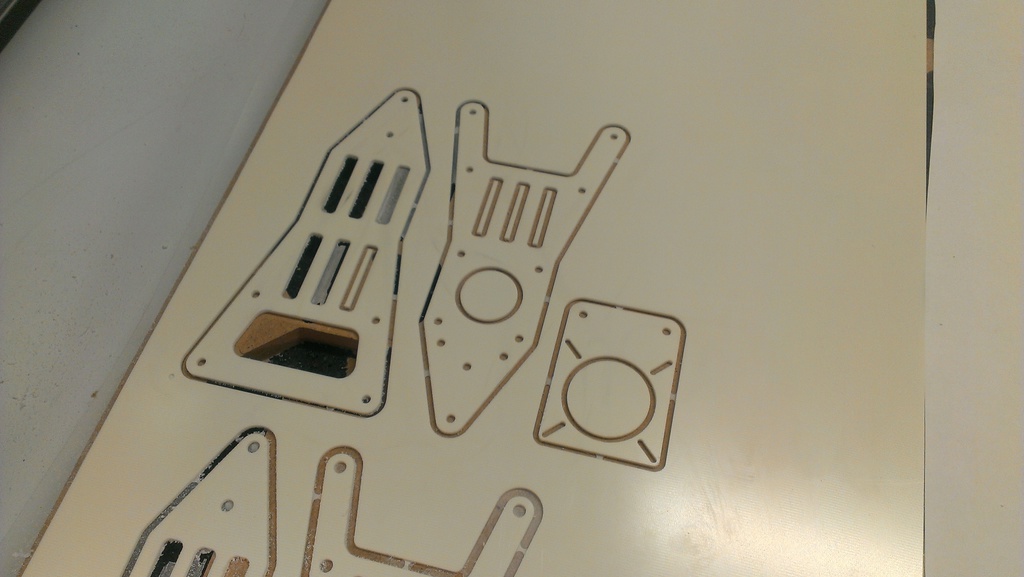 主な部分が切り取られています
主な部分が切り取られています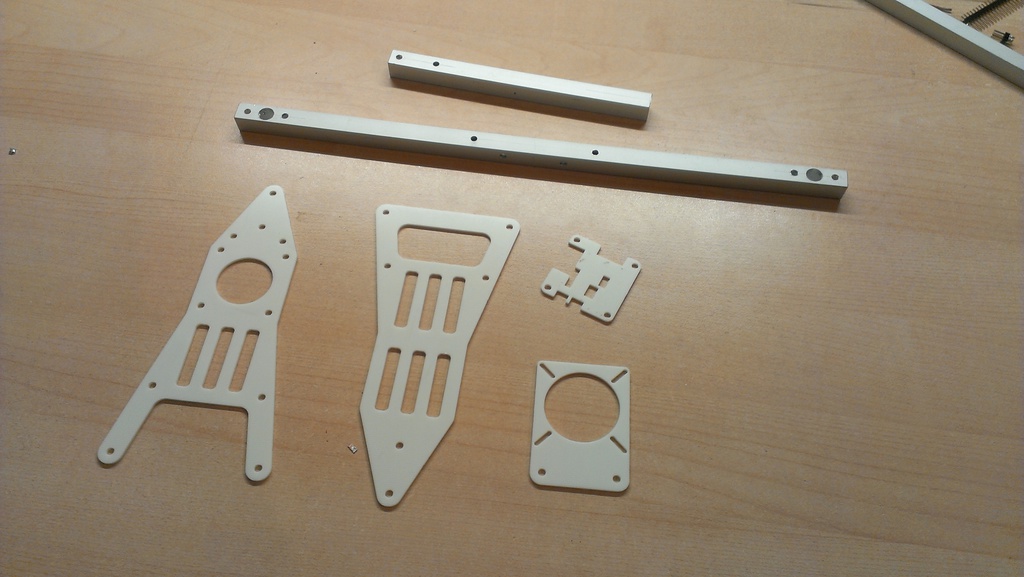 すべての部品は組み立ての準備ができています。 必要な長さに切断されたアルミニウム管に、必要な穴がすべて開けられます。
すべての部品は組み立ての準備ができています。 必要な長さに切断されたアルミニウム管に、必要な穴がすべて開けられます。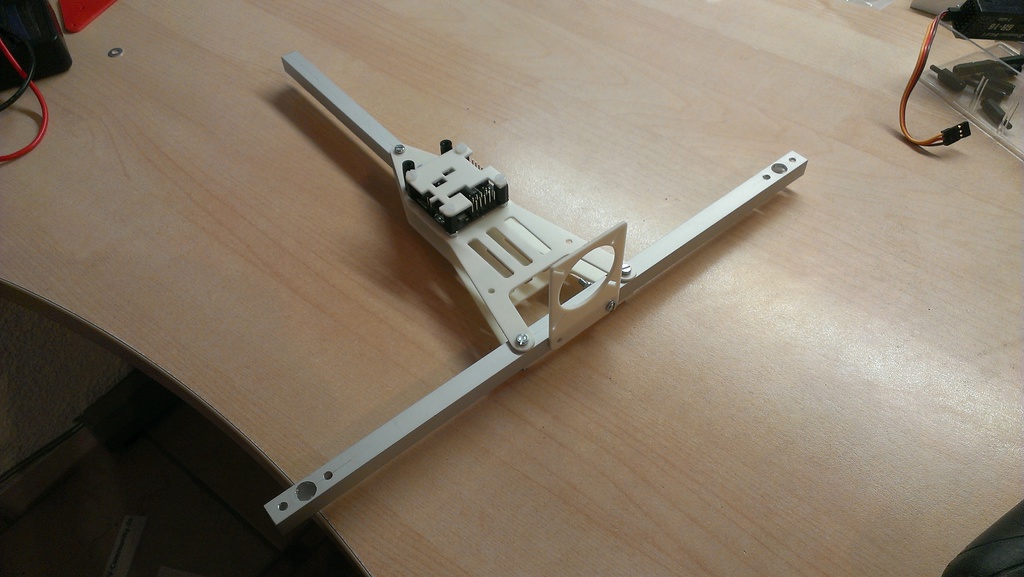 コントローラー付きの組み立て済みフレーム。
コントローラー付きの組み立て済みフレーム。力学
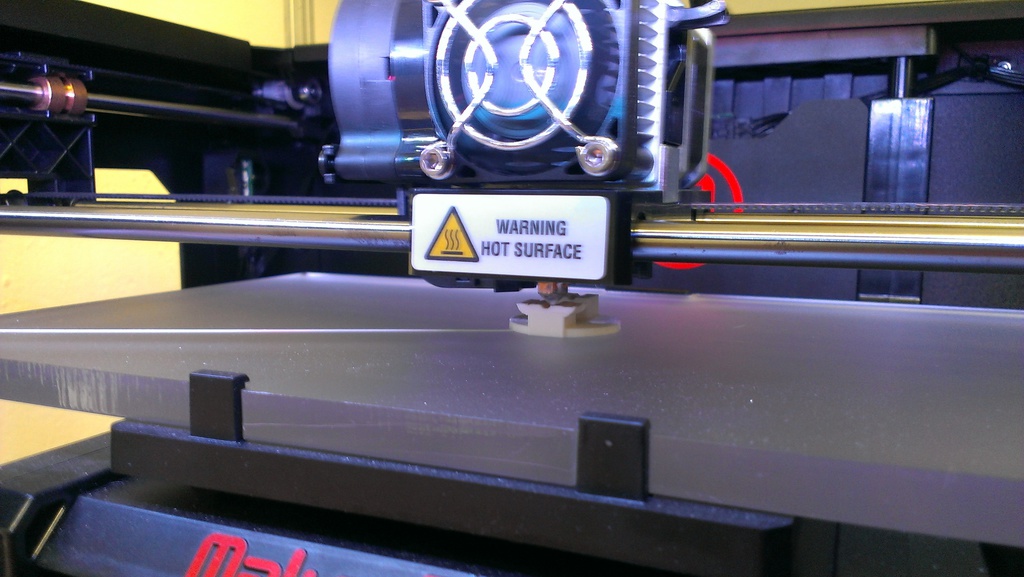 MakerBot Replicator 2はPLAから部品を印刷します。 合計で、両方の半分の印刷には約30分かかり、層の厚さは0.2mmでした。
MakerBot Replicator 2はPLAから部品を印刷します。 合計で、両方の半分の印刷には約30分かかり、層の厚さは0.2mmでした。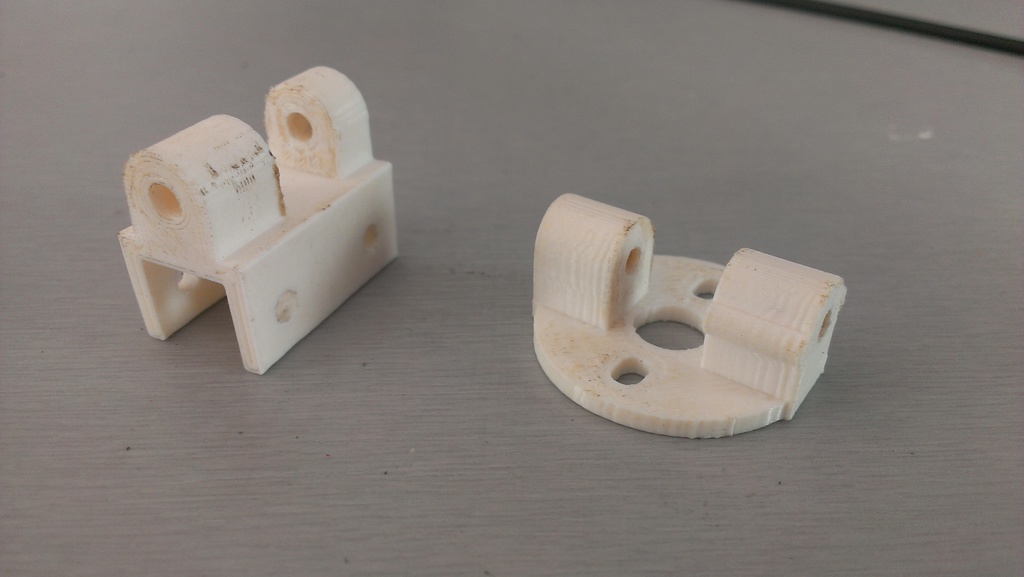 完成したヒンジ半分。 穴を手動で再ドリルし、ジャンクションをファイルで埋める必要がありましたが、その後、パーツは完全に、実質的に遊びなくぴったりと合い、手間をかけずに回転しました。
完成したヒンジ半分。 穴を手動で再ドリルし、ジャンクションをファイルで埋める必要がありましたが、その後、パーツは完全に、実質的に遊びなくぴったりと合い、手間をかけずに回転しました。規制当局
Blue Seriesレギュレーターは、上で言ったように、SimonKソフトウェアを改造しました。 これを行うには、工場出荷時の縮小を削除し
、USBAspプログラマー 、
Atmegaチップ用アダプター 、および
kkflashtoolプログラムを使用し
てそれらを再プログラムする必要がありました。 その時点ではまだフレームを組み立ててケーブルを解凍していないので、ファームウェア後のレギュレーターのテストは次のようになりました。
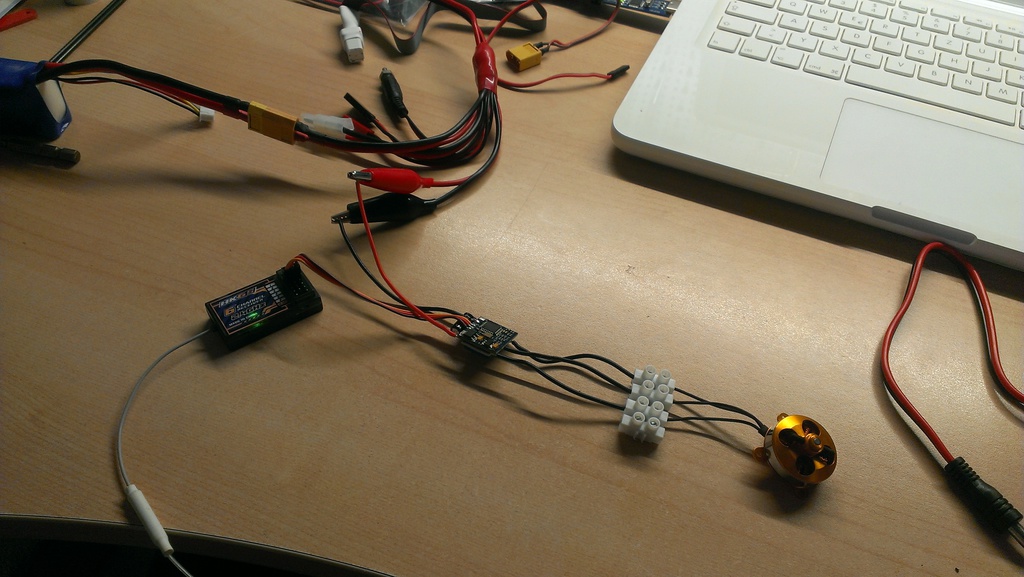
その後、白い熱収縮でレギュレーターを隔離しました-私のフレームはすべて白だからです。
組立
写真のヘリコプターの最終組み立て:
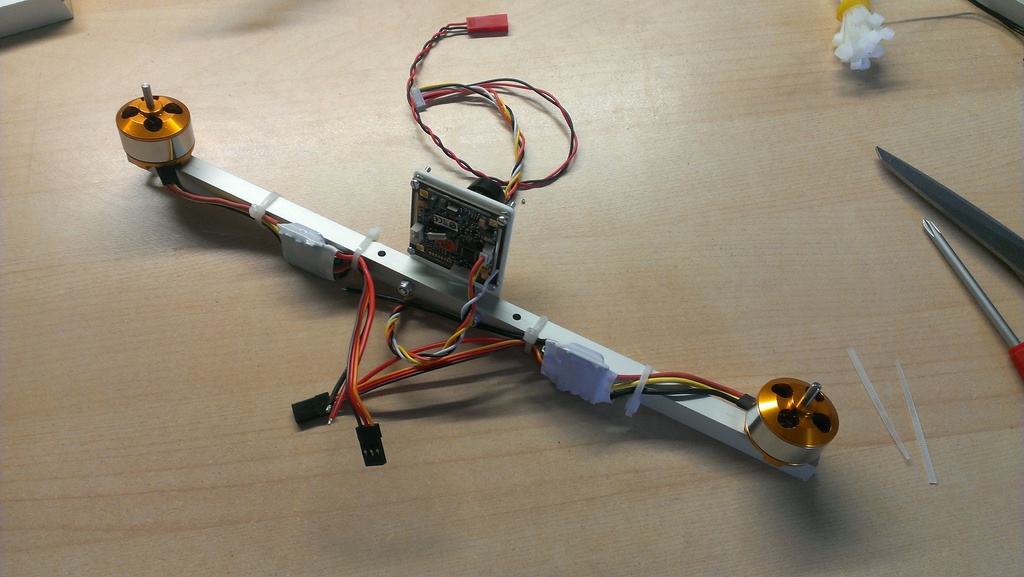 フロントモーター、そのレギュレーター、FPVカメラが取り付けられています。
フロントモーター、そのレギュレーター、FPVカメラが取り付けられています。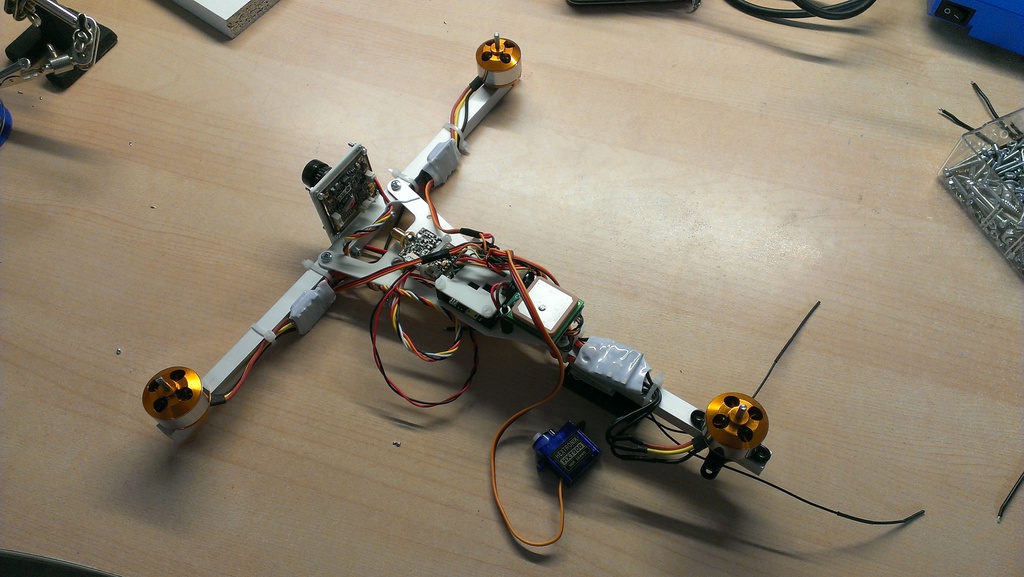 すべての電子機器は、上半分のフレームに取り付けられます。ビデオ送信機の前、次にコントローラー、GPS、レギュレーター、および(まだしっかりとねじ込まれた)第3モーターの前です。 側面にはサーボドライブがあります。
すべての電子機器は、上半分のフレームに取り付けられます。ビデオ送信機の前、次にコントローラー、GPS、レギュレーター、および(まだしっかりとねじ込まれた)第3モーターの前です。 側面にはサーボドライブがあります。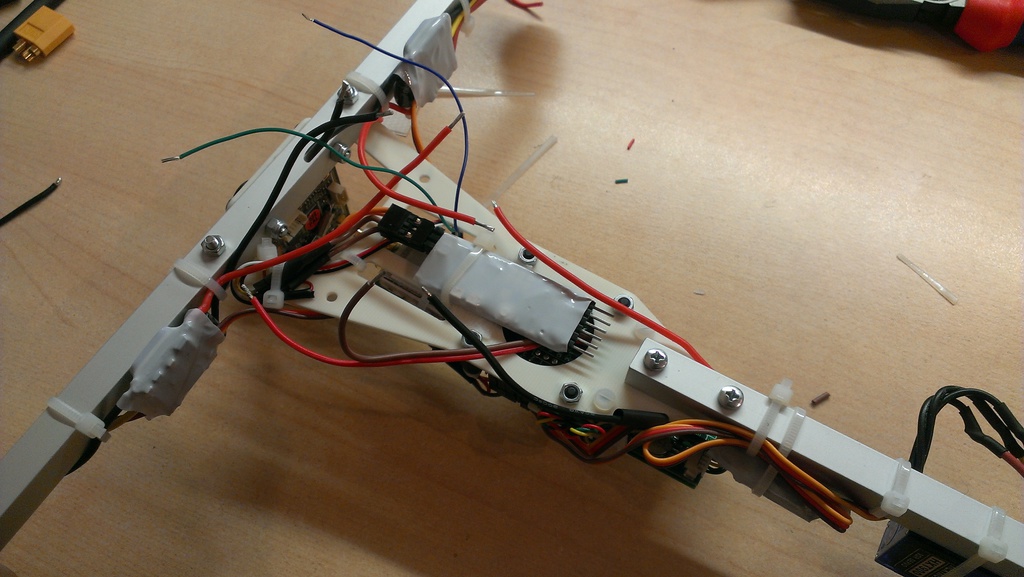 底面図:MinimOSDの真ん中、白いシュリンク、ワイヤーの周り。
底面図:MinimOSDの真ん中、白いシュリンク、ワイヤーの周り。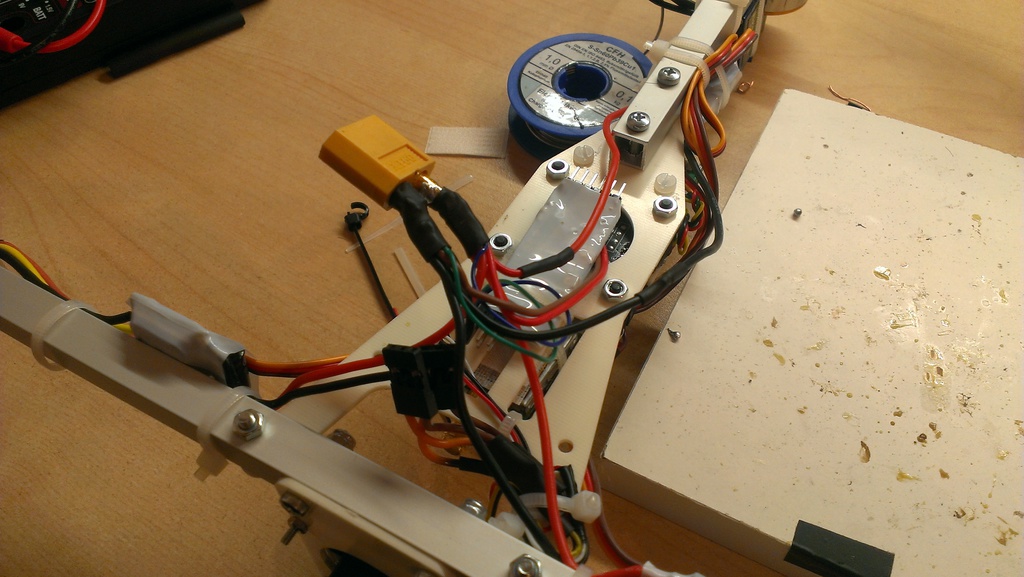 ワイヤーの束はわずかに合理化され、バッテリーのコネクターははんだ付けされています(通常の黄色のXT60)。 3Sバッテリーの長所-電圧が11〜12.6Vの12ボルトデバイス(この場合はカメラとトランスミッター)から直接給電できます。 個別のBECは不要で、重量が節約されます。
ワイヤーの束はわずかに合理化され、バッテリーのコネクターははんだ付けされています(通常の黄色のXT60)。 3Sバッテリーの長所-電圧が11〜12.6Vの12ボルトデバイス(この場合はカメラとトランスミッター)から直接給電できます。 個別のBECは不要で、重量が節約されます。 リアモーター、サーボドライブ、モーター自体の機構が組み込まれています。 ヒンジ軸として、3mmのカーボンロッドを使用しました。非常に軽量で耐久性があります。 そのための穴は、ヒンジの上半分がしっかりと固定され、下半分が自由に回転するように開けられます。 安心のため、モーターの近くに接着剤を一滴垂らして固定します。 以下は、Graupner GR-16の受信機です。
リアモーター、サーボドライブ、モーター自体の機構が組み込まれています。 ヒンジ軸として、3mmのカーボンロッドを使用しました。非常に軽量で耐久性があります。 そのための穴は、ヒンジの上半分がしっかりと固定され、下半分が自由に回転するように開けられます。 安心のため、モーターの近くに接着剤を一滴垂らして固定します。 以下は、Graupner GR-16の受信機です。 キッチンスケールの準備ができたヘリコプター。 古いTurnigyバッテリーは、私が飛行している新しいZippy Compactよりも20グラム重いので、総重量は550グラムになり、私のクワッドよりも4倍少なくなりました。
キッチンスケールの準備ができたヘリコプター。 古いTurnigyバッテリーは、私が飛行している新しいZippy Compactよりも20グラム重いので、総重量は550グラムになり、私のクワッドよりも4倍少なくなりました。ただし、ヘリコプターの組み立てはすべてではありません。
Naze32ファームウェア
最も重要なことから始めましょう-コントローラーファームウェア。 STM32チップでは、すべてがArduino互換のMultiWiiコントローラーよりも少し複雑ですが、それほど複雑ではありません。 コントローラーの背面にある2つの接点ではんだを閉じ、USB経由で接続し、
Flash Loader Demoを実行し
ます 。

115200ボー、目的のポートを設定して、始めましょう。 [次へ]を数回選択し、[ダウンロード]を選択し、[ユーザープログラムへジャンプ]および[グローバル消去]を選択し、選択したファームウェア(BaseFlightまたはHarakiri)のダウンロードした16進ファイルを選択し、もう一度[次へ]をクリックします。 コントローラーの再起動後、再起動します。 接続を解除し、背面の接点間のジャンパーを取り外します(そうしないと、コントローラーは毎回ファームウェアモードで起動します)。
BaseFlight / Harakiri設定
ソフトウェアの構成は2つのステップで行われます-最初にメインパラメーターをコマンドラインから構成し、次にMultiWiiの標準インターフェイスを使用してPIDコントローラー、AUXチャネルなどを構成します。 Puttyまたは他のターミナルクライアントを用意し、コントローラーをUSBに再接続し、シリアルポートへの接続を開いてすぐに「#」を押して、コントローラーがインタラクティブモードに入るようにします。
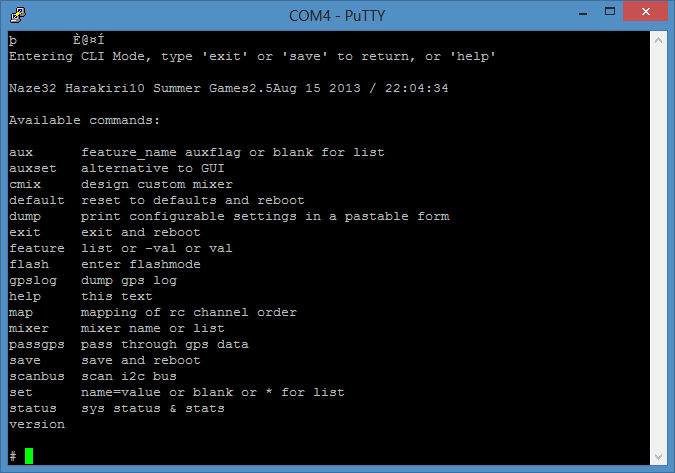
メイン構成を実行します-ヘリコプターのタイプを設定し(トリコプター)、GPSおよびPPM機能をオンにします(使用する場合-PPMは、すべてのチャンネルが1本のケーブルで送信されるレシーバーから信号を出力するモードです)、チャンネルマップを設定します(リモートのチャンネル順序4つの制御軸とAUXを担当します-d / yシステムが異なると異なります)。 保存して、コントローラーを再起動します。
mixer tri feature gps feature ppm map TAER1234 save
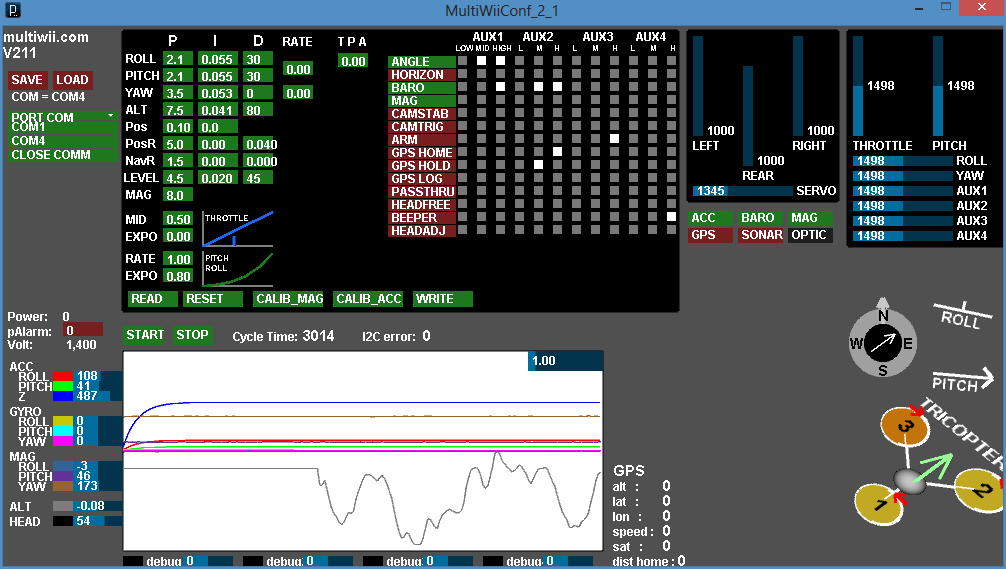
ターミナルを閉じて、MultiWii GUI 2.1を開きます。 そこで、通常のMultiWiiコントローラーと同様に、AUXチャネルの機能を設定し、リモートコントロールのチャネル範囲を確認し、境界ができるだけ1000/2000に近く、中間が1500になるように設定して、加速度計と磁力計を較正します。
すべて、あなたは飛ぶことができます。 このような重量とサイズのヘリコプターを使用した最初のテストは、手でしっかりと保持してすぐに簡単に実行できます(一般にこの手順はお勧めしませんが、550 gの重量と〜1.4 kgの最大推力では、非常に簡単に保持できます):ヘリコプターをスロットルしてすべての軸の周りを回し、正しく反応するようにします(動きに抵抗します)。 サーボモーターが後部モーターを間違った方向に傾ける場合、これはコマンドラインで変更できます。
set yaw_direction = -1
もう1つの詳細は、パラメーターをさらに深く掘り下げなければならなかったためです。Naze32コントローラーのUSBポートは背面にあります。 ただし、ヘリコプターに取り付けた場合、GPSはそこにあり、ポートは閉じられています。 そこで、コントローラーを90°回転させることにしました。 これは可能です-パラメータのセンサーの軸を変更するだけです。 簡単すぎないように、ジャイロスコープ、加速度計、磁力計の軸はすべて異なります(ジャイロスコープと加速度計が1つのチップに組み合わされている場合でも)。 FPV-Treffフォーラムを使用して、時計回りに90°回転する正しいコマンドを見つけることができました。
set align_mag_z = -2 set align_mag_y = -3 set align_mag_x = -1 set align_acc_z = 3 set align_acc_y = -2 set align_acc_x = -1 set align_gyro_z = -3 set align_gyro_y = 1 set align_gyro_x = -2
この順序で実行する必要があります。そうしないと、コントローラーがフリーズする可能性があります-明らかに、トリッキーなバグがどこかに隠れています。 保存して再起動した後、MultiWiiインターフェースでデータの正確性を確認してください-ロール角とピッチが右側に表示され、回転したコントローラーの位置に対応するはずです。
OSD設定
すでに本格的なFPVヘリコプターを製造しているため、ビデオのコントローラーからの情報を表示するOSDなしではできません。 MinimOSDは、標準のファームウェアでもHarakiriでNaze32で動作します。これは、BaseFlightとは異なり、HarakiriがMAVLinkプロトコルをサポートしているためです。 ただし、MinimOSDには
KV-Team-OSDと呼ばれるすばらしいファームウェアがまだあります。 通常はMultiWiiコントローラーで動作するように設計されていますが、Naze32で良好に動作し、標準および他のファームウェアとは異なり、画面上のメニューからリモートコントロールを使用してコントローラーのPIDパラメーターを変更できます。 これにより、これらの同じパラメーターを構成する時間が大幅に短縮されます。通常は、コンピューターのGUIを介してのみ変更されます。
MinimOSDは、OSDチップMAX7456とArduinoと互換性のあるATmega 328pプロセッサを搭載したミニチュアボードです。 ボードにはUSBコネクタがないため、ファームウェアと構成にはFTDIアダプタのみが必要です。
まず、FTDI経由でMinimOSDをUSBポートに接続し、Arduinoを開きます。 標準EEPROMクリアスケッチを開き、目的のCOMポートを選択し、Arduino ProまたはPro Mini(5V、16 MHz)w / ATmega 328ボードを設定し、入力します。 ボードのLEDが点灯するまで数秒待ちます-古いファームウェアのメモリが消去されます。 KV-Team-OSDバージョンr345またはr370をダウンロードし、次の行を開いてconfig.hに追加します。
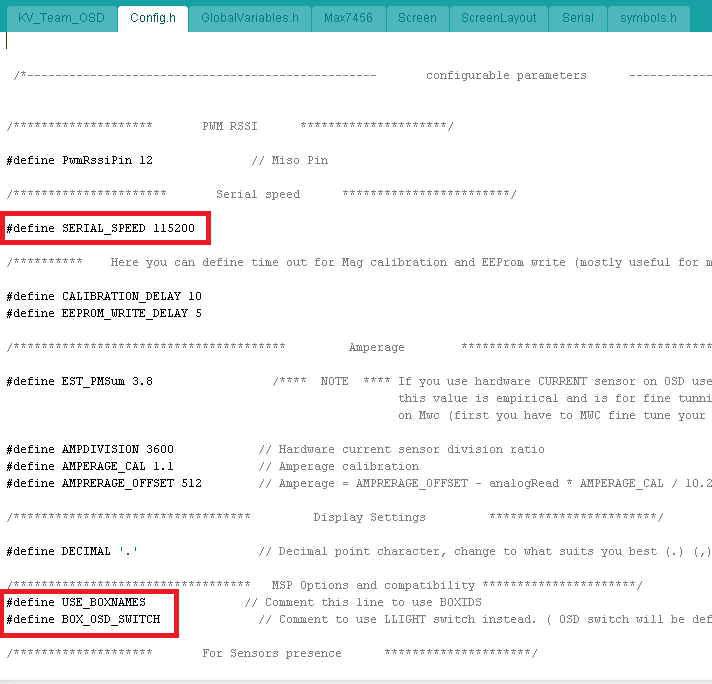
コンパイル、フィル。 Arduinoを閉じて、ボードのOSD側に電源を接続します(12Vが必要です、そうでない場合はMAX7456チップに電力が供給されません;あるいは、いくつかのバージョンでは、はんだで複数の接点を接続し、MAX7456に5Vから電力を供給できますが、カメラとトランスミッタ側から+を接続することはできません)、KV-Team-OSDからGUIを開きます。 MultiWii GUIと同じ処理で作成されており、同様に見えます。 [アップロード]をクリックしてMAX7456チップのフォントを埋め、プロセスの終了を待ちます。 パラメーターを設定します:最小ボード、RSSIやその他のゴミを表示しない、MultiWiiデータから電圧を表示する(コントローラーに適切なケーブルが接続されている場合)、座標以外のGPSデータを表示する、その他はすべてオプションです。
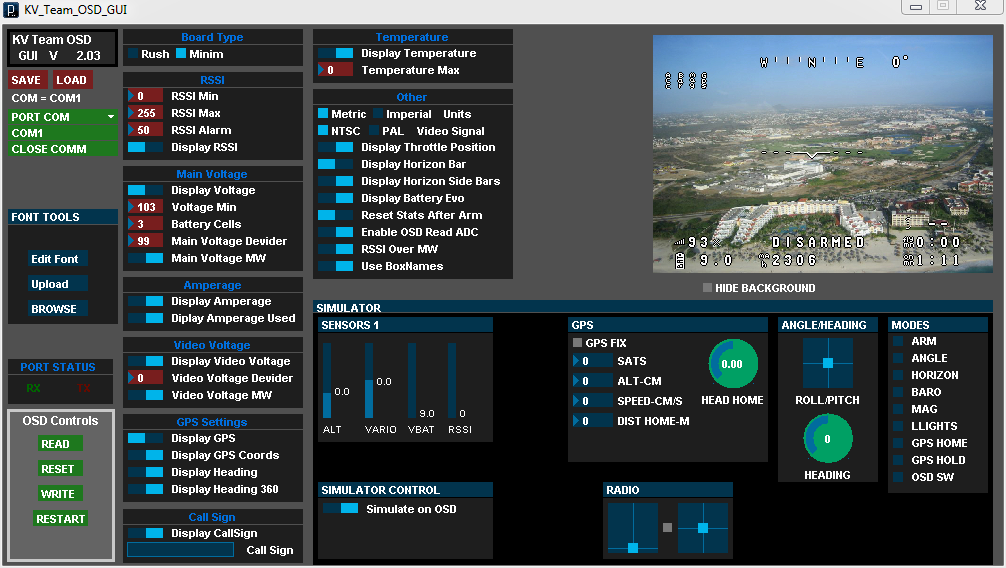
この時点でカメラとトランスミッターがすでに接続されており、電源が入っている場合、書き込みを押すと設定の変更がビデオにすぐに表示されます。 完全に満足するために、GUIの下部でシミュレーターをオンにし、OSD画像が飛行中にどのように変化するかを見てシミュレーションを再生できます。
すべての設定が完了したら、(書き込み)をクリックして、FTDIアダプターを切断し、MinimOSDをNaze32に接続することを忘れないでください-TXおよびRXピンはコントローラーの中央にあり、+ 5VおよびグランドはBECレギュレーターの1つから直接、またはコントローラーの空きコネクターから取得できます。
飛んだ!
オンボードビデオの品質について事前に謝罪します。 ヘリコプターにはFPVカメラしか搭載されていないため、録画はベースステーションのシンプルなレコーダーで行われます。そのため、録画時の品質は、操作時にメガネで見るよりも若干悪くなります。 ただし、GoProでの記録とは異なり、OSDデータは表示されます。
安価なHXT900サーボと不完全なPIDを使用した最初の飛行は、すでにかなり良好ですが、少し緊張しています。 ビデオの真ん中で、画面上のメニューからPIDパラメーターをどのように着陸させて変更するかを見ることができます。その後、飛行はよりスムーズになります。 OSDが完全に機能しない-config.h(boxnames)のパラメーターの1つを忘れました。これは、アクティブセンサーのステータス、フライトモード、武装/武装解除ステータス、GPS速度が機能しないためです。
TGY-9025MGサーボを取り付けてPIDを再構成した後の飛行。 さらに、OSDは完全に機能します。 はるかに良い:)
まとめ
まとめると。 ヘリコプターに割り当てられたすべてのタスクが完了します。
- 操作性:ビデオを参照してください。
- 耐衝撃性:あり。 私はすでに数回木にそれをスピードで植えました( GIF-慎重に、10メートル)、パパパパ、すべては無傷で、プロペラでもまだ1つは壊れていません。
- 飛行時間:Zippy Compact 2200をフル充電すると、約15分のアクティブな飛行が得られます。 かなり。
- 重さ:550g、私のクワッドの4倍、非常に軽量。
- コンパクトさ:ヘリコプターとリモートコントロールおよびバッテリパックは、バックパックに収まります。 残念ながら、私はまだレシーバーを内蔵したビデオグラスを持っていません。三脚のベースステーションは私に2個目のバッグを携帯するように強制します-これはすでに大きなクワッドよりも桁違いに優れています。
このデバイスには完全に満足しています。 それを飛ぶことは喜びです。 Naze32とHarakiriソフトウェアは完全に飛行します。ヘリコプターは空中で非常に安定しており、軽量で十分に強力なモーター駆動により飛ぶように飛行方向を変えます。
私はエゴイストではないので、そのような喜びを自分に委ねることはイデオロギー的に間違っていると考えているので、フレーム図面とすべての人のヒンジの3Dプリント用ファイルへのリンクを次に示します。
コメント、批判、コメントを歓迎します。 質問に答えようとします。