
今日は、火星-火星-3による地球からの宇宙船の最初の成功した着陸以来42年です。 放送が始まったため、彼が首尾よく座ったことが知られています-彼は表面から最初の写真パノラマを送信し始めました。 アンテナは、マージングに成功した場合にのみ開くことができました。
おそらくご存知のように、今年、
Zelenyikotと彼のVKontakteグループ
「Curiosity-Mars rover」の加入者が
火星で 「Mars-3」を発見したことを知ったとき、彼らは再び彼を思い出しました。
「火星-3」の発見から数日後、私はそれがどれほど興味深いか、この装置が地球に一度も伝達したことのない種が怖かった。 その時までに、私はCuriosity画像とそれに付加された高さマップに基づいてBlender 3Dで3Dオブジェクトを作成する経験がありました。 そのため、「同じことをすることは可能ですが、火星-3着陸地点のモデルでは、装置の代わりにカメラを配置することはできますか?」
理論的には、すべてが単純です。 NASAの専門家が
表面アナグリフを作成した
ことに基づいて、火星偵察オービター衛星からデータを取得する必要がありました。 グーグル、アナグリフを高さマップに変換する方法を見つけたことがありません。
Curiosityと呼ばれるバンドは助けを求めて叫びました。 彼は応答を見つけました。それに対して、衛星データに基づいて応答し、高さマップを作成した
ダニール・トルカチョフに深く感謝します。
プロセスの説明は次のとおりです。
「ツールキット:Python + OpenCV。 アルゴリズムは個人的に作成されますが、標準では:
1.画像で特性を検索します(SIFTアルゴリズム)
2. 2つの画像のポイントフィーチャが比較されます。 その結果、ある画像上の点と別の画像上の線を結ぶ行列(基本行列)を取得します。
3.基本行列に基づいて、画像が整列されるため、2つの画像上の同じオブジェクトが水平に配置されていることがわかります。 アナグリフは、修正された画像に基づいて構築されます。 立体比較もそれらに基づいて行われます。
4. Semiglobal Stereo Matchingアルゴリズムを使用して、視差マップが構築されます。 アルゴリズムの設定と大きな画像の処理には微妙な点がいくつかあります。
高さマップを構築するために使用される方法では絶対値を取得できないため、衛星画像の取得の特性により、ある程度の歪みが生じる可能性があることに注意してください。(それはHabréではないようですが、プロセスが興味深い場合は、詳細な説明のために彼を招待しようとします)。
その時までに
、火星3の3Dモデルを作成するための
競争が「火星探査
車 」グループで開催され、パノラマに追加することができました。
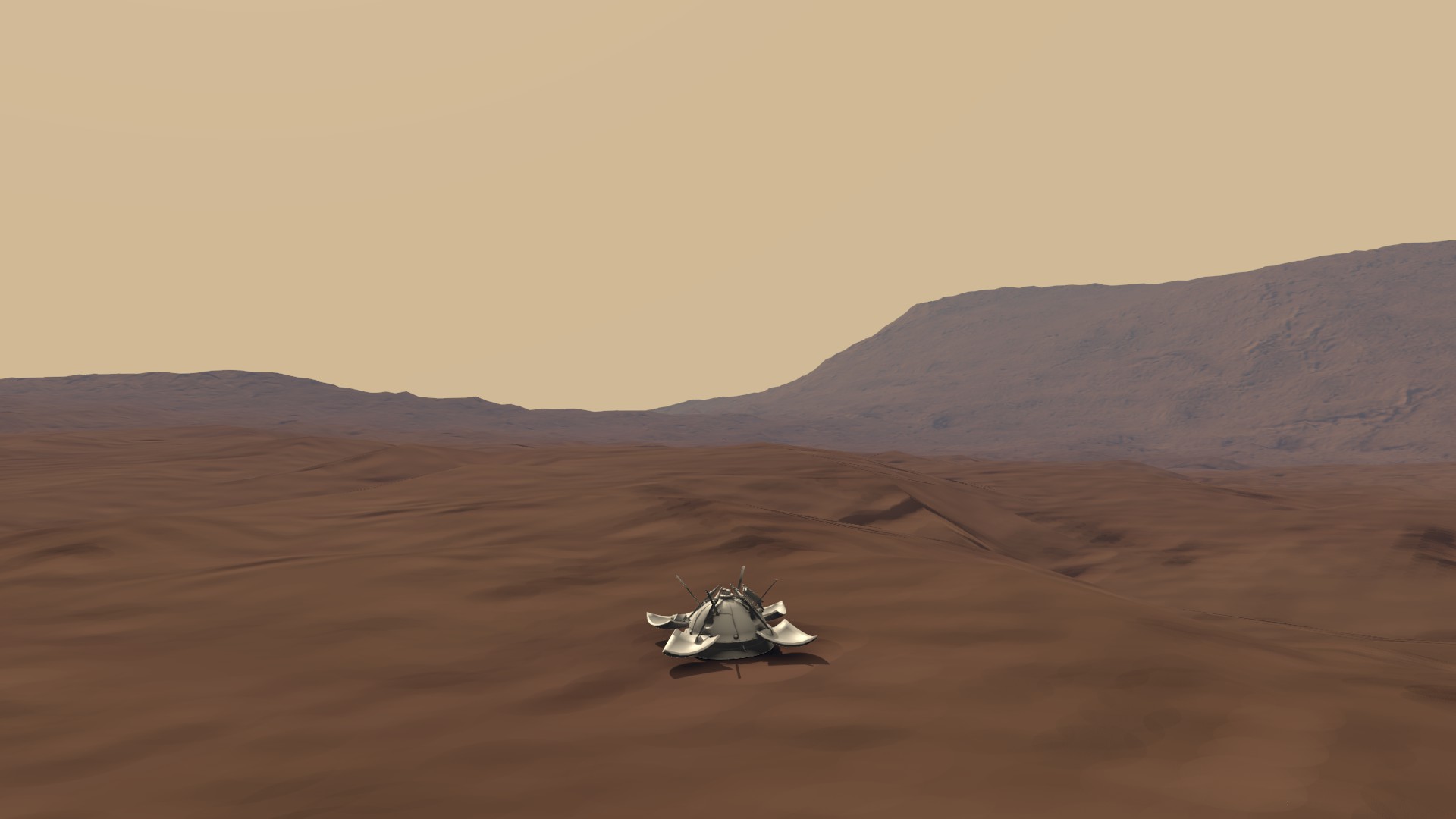
さらに、技術の問題。 要するに、テクスチャの画像内の目的の領域の正方形の断片を切り取り、高さマップ上で同じようにします。 Blender 3Dでは、サーフェスを作成し、その上に高さマップを重ね合わせ、比例をわずかに修正し、テクスチャを重ね合わせ、太陽、空の色、大気を設定し、デバイスのモデルを衛星画像(テクスチャ)の所定の場所に配置しました。
比例性についてさらに詳しく説明したいと思います。 普通の人なら誰でも尋ねるでしょう:「そして、この画像の見方が多かれ少なかれ現実に対応しているという保証はどこにありますか?」 すべてが非常に簡単です。 まず、地図は衛星データに基づいています。 第二に、このような興味深いことがあります-プログラム内のオブジェクトは比例的にスケーリングされます。 モデルの各辺は同じ回数だけ増加します。 したがって、モデルを衛星写真のデバイスの直径に正確に引き伸ばすことにより、自動的に景観全体に比例させます。
その結果、次のことが判明しました。
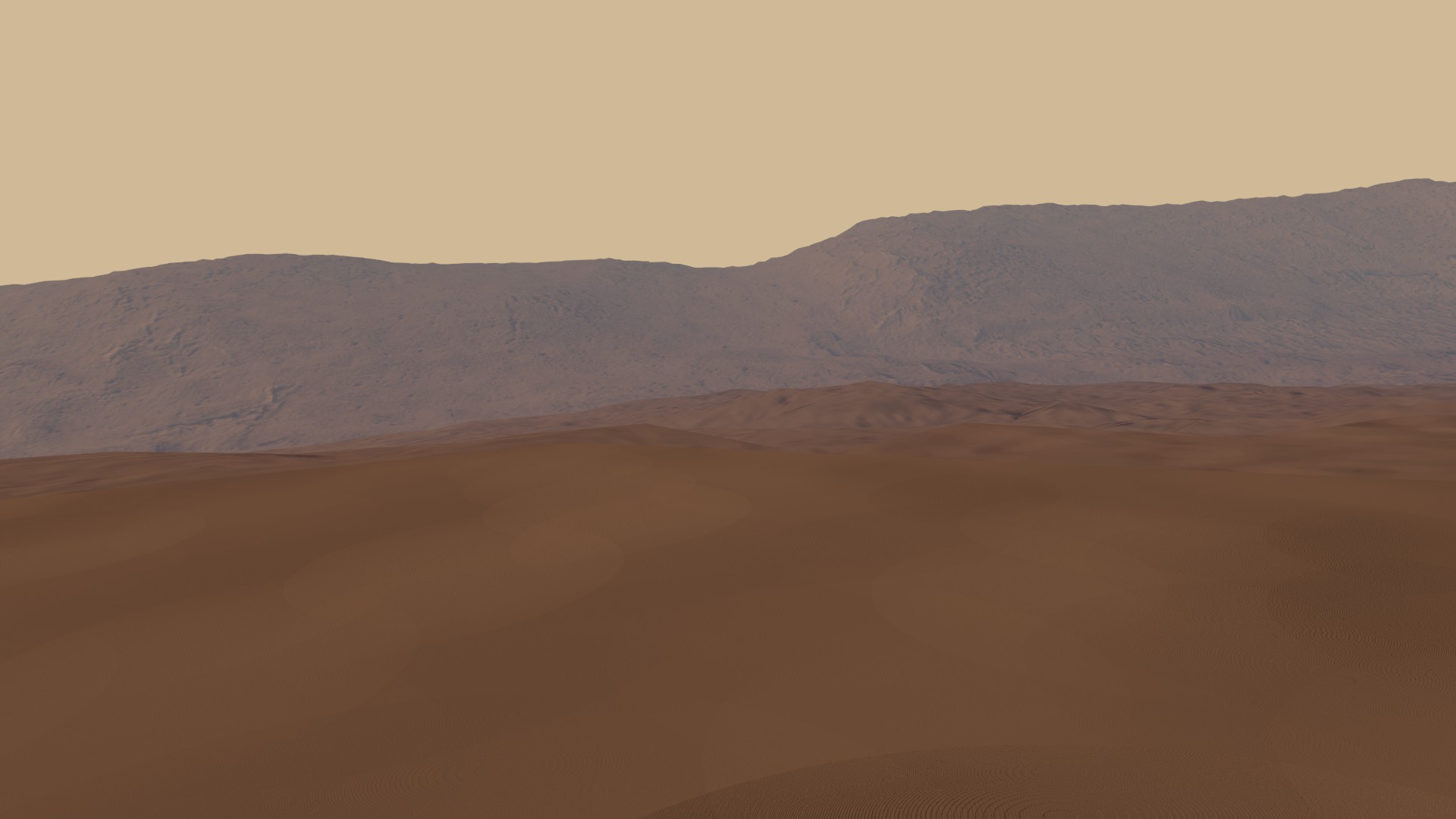
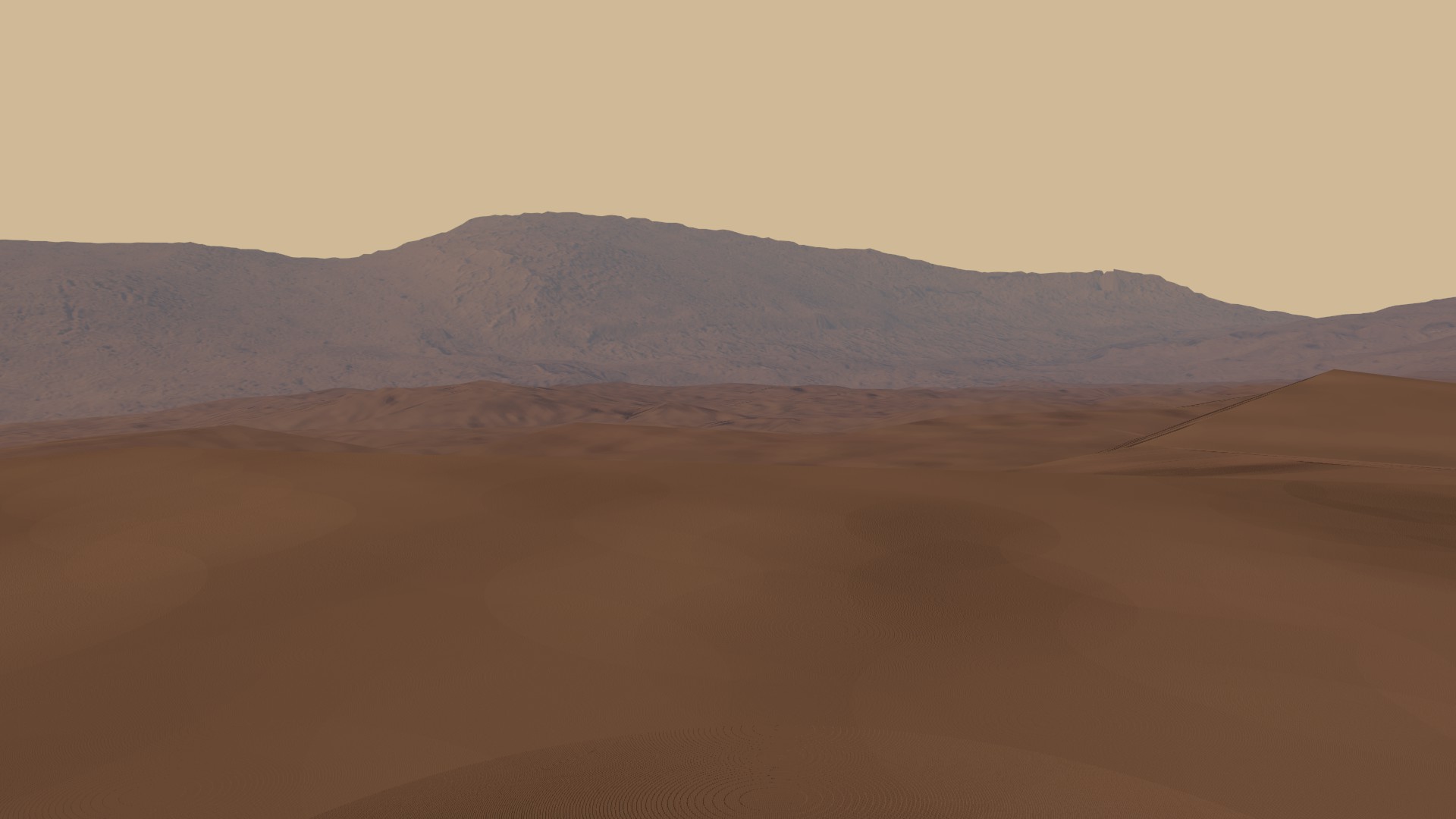
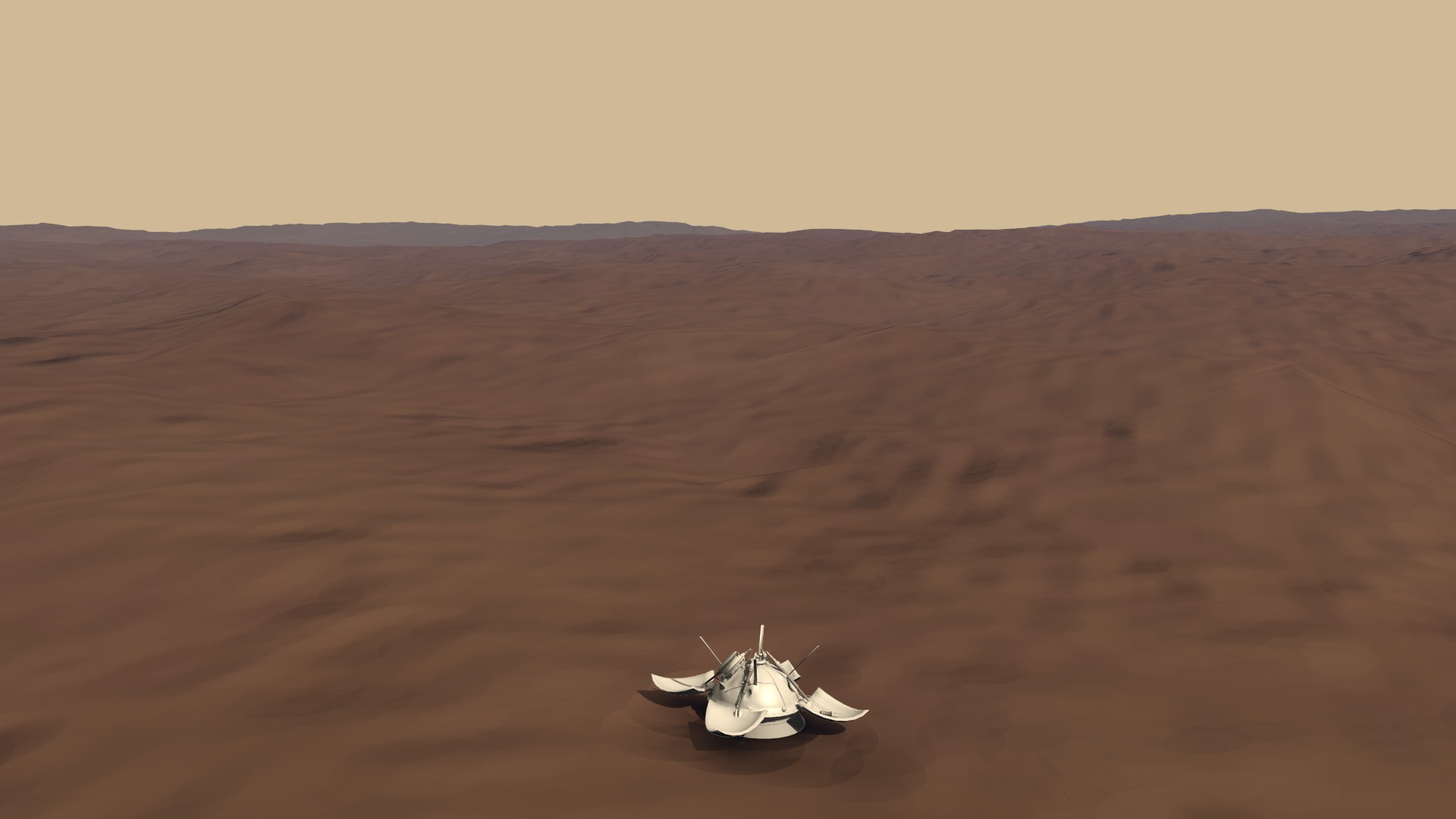
以下は、火星3自体のカメラに代わってカメラを配置することによって取得された画像です(画像の長さと高さは、デバイスのカメラの形式に対応しています)。
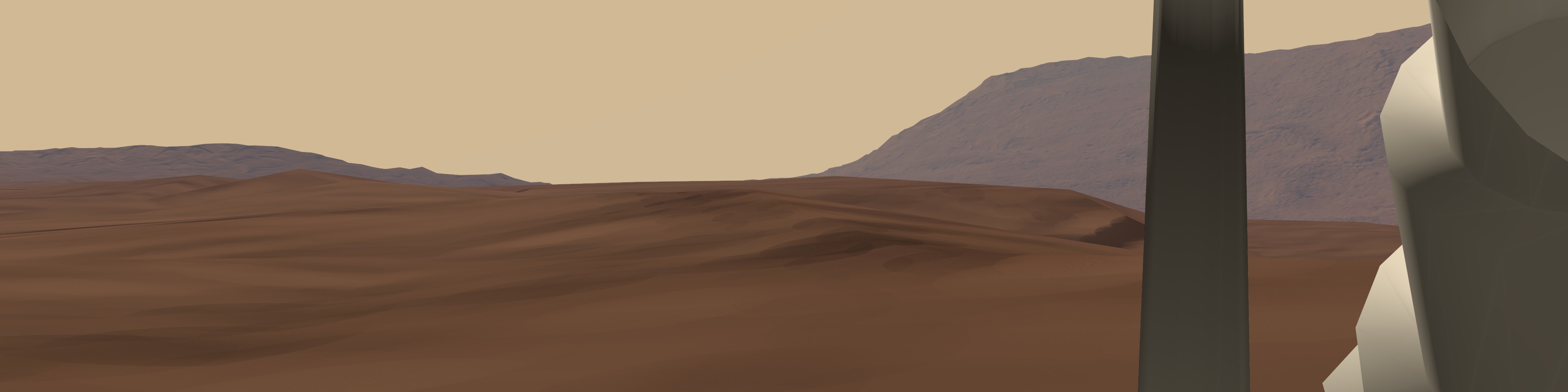
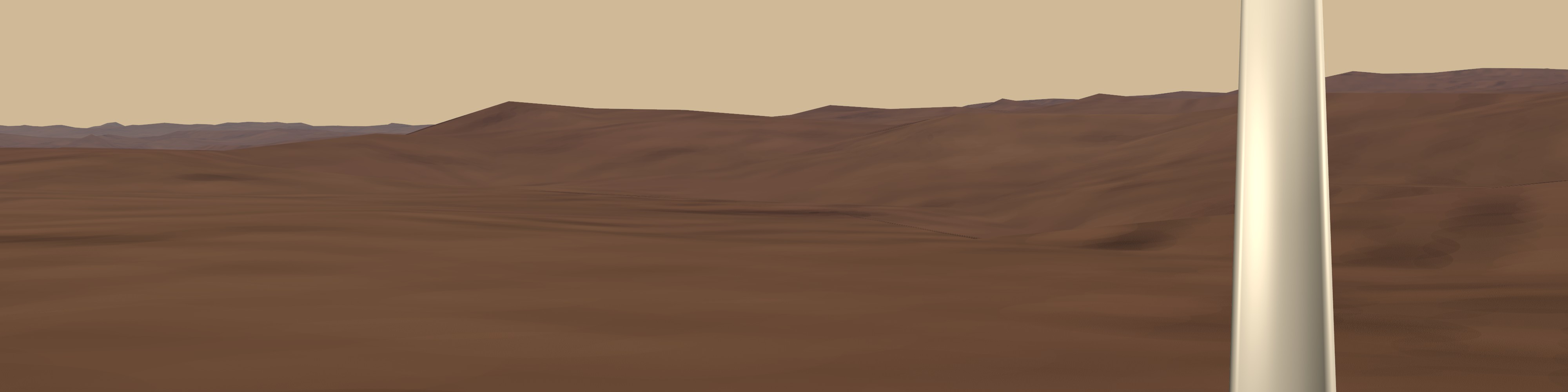

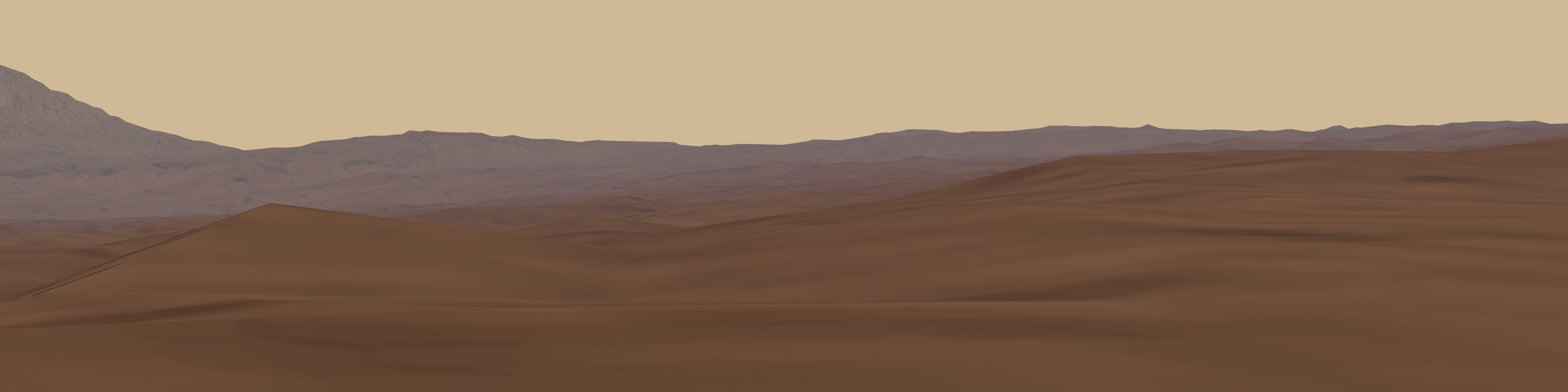
写真で最も注目すべき詳細は背景の山です。これは、2013年8月にそう
命名された18キロメートルのロイトフクレーターの城壁です。
私は強調します-彼らは超正確なふりをしていませんが、デバイスがまだ表面から画像を送信した場合に見られるものに60%が対応していると確信しています(そしてカメラの品質は70- e gg)。
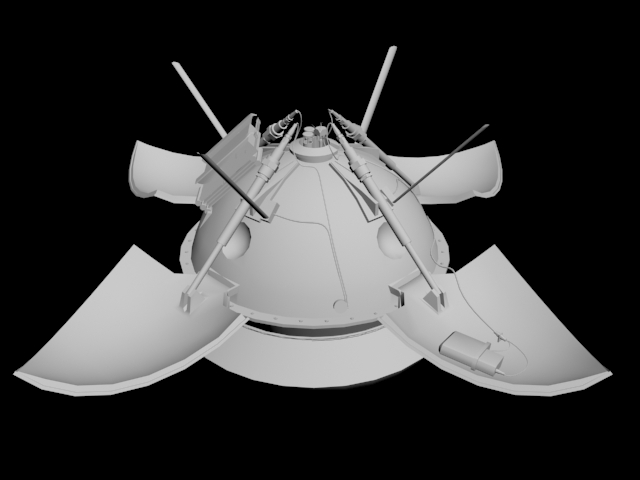
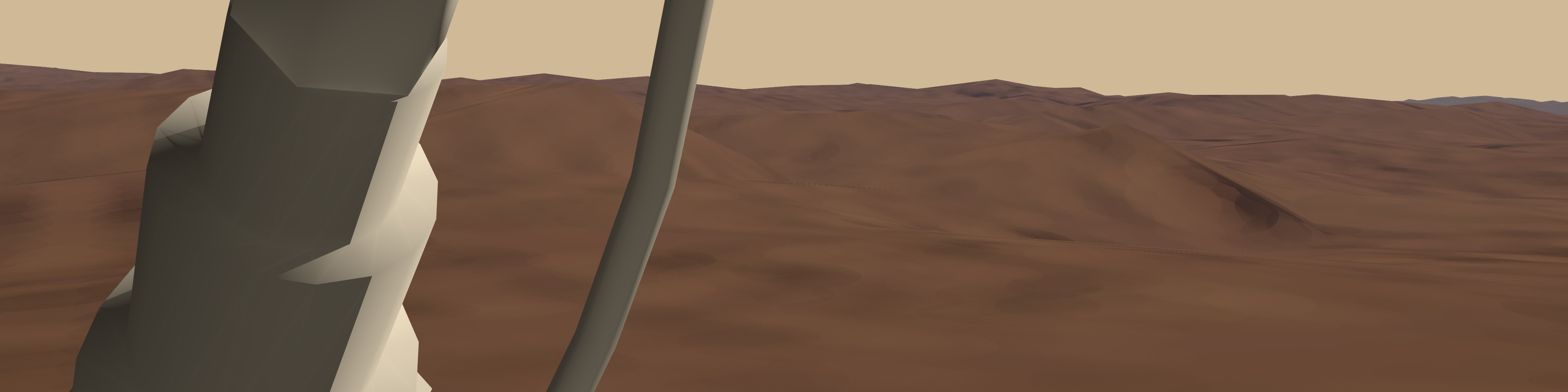
残念ながら、トーラス容器の下部にチェーンで接続されたブレーキエンジンの3Dモデルはありません。また、表面に衝突した瞬間にプローブが保護されたフォームケーシングのモデルはありません。 したがって、着陸地点の全体像を確立することはできません。 図面もありません。火星-3のモデル自体も、写真に基づいて「視覚によって」作成されました。

ご覧のように、表面のシミュレーションでは十分な石がなく、衛星画像で見ることができるあらゆる種類の小さな詳細があります。 したがって、habrausersの中に、それをもっとうまくやるか、自分でやる方法を教えてくれる人がいるなら、私はとても幸せで、可能な限りの援助を提供する準備ができています。