機能が制限された単純なロボットであっても、ロボットを作成することは、かなり興味深く魅力的なタスクです。 最近、アマチュアロボット工学は真のブームを経験しており、電子機器(私は彼らに属している)から非常に遠い人々でさえ、それに関与し始めています。 夜にはんだごてで座るか、ボードを毒しなければならなかった時が過ぎました。 すべてがよりシンプルになりました。Arduino、ワイヤー、センサー、センサー、モーターのセットを購入し、最初のロボットを組み立てるだけです。 したがって、アマチュア開発者の焦点は、エレクトロニクスと機械からプログラミングに移りました。
この一連の記事には、必要な部品の購入から世界での起動まで、最初のロボットをすばやく作成するための情報が含まれています。
私は材料の独立した研究と私の最初のロボットの作成の過程で記事を書くことに注意してください。
記事を読んでいる人はすでに以下の経験を持っていると想定されます。
- Androidデバイスの開発環境をインストールして構成します。
- Androidデバイス用の最初のHello Worldプログラムを作成します。
- Arduinoのドライバーと開発環境をインストールします。
- Arduinoの最初のプログラム(オン、オフ)LEDを作成します。
略語
BT-Bluetooth;
Android-スマートフォンなど、Android OSを搭載したデバイス。
Sketch-Arduino用のアプリケーション。
Arduino-Arduino Nano。
ロボットの一般的なスキーム
ロボットに次の一般的なスキームを持たせます(図1)。 Androidは、すべてのデータが処理され、計算が実行される「頭脳」です。 計算結果に基づいて、BTチャネルはBTモジュールが受信したコマンドを転送し、その後Arduinoのシリアルポート経由で受信します。 Arduinoは受信したコマンドを処理し、「筋肉」(モーターのLEDなど)を使用して実行します。 さらに、Arduinoは「感覚器官」(センサー、センサーなど)からデータを受信します。このデータは便利な形式になり、BTモジュールを使用して「脳」に送信されます。 そして、それは無限に繰り返されます。
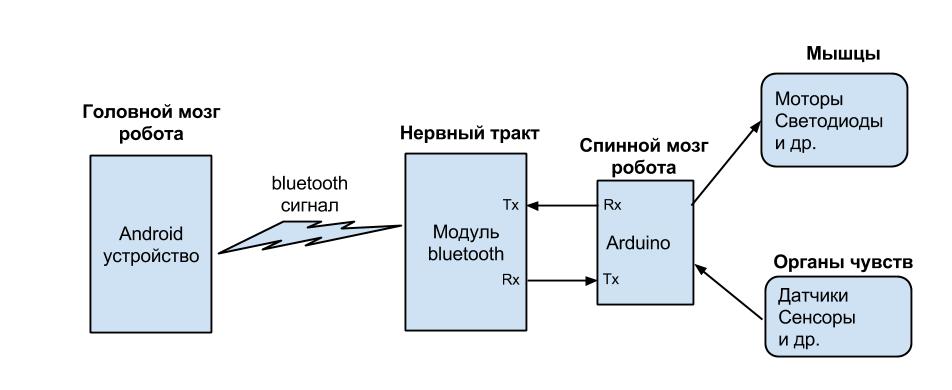
図1
このようなロボット回路の理論的根拠は次のとおりです。
-BTモジュールとArduino Nanoは、低コストで、体積と重量が小さい。
-Androidは、高価で手頃な価格のデバイスではなく、私を含めてすでに膨大な数の人々がいます。
-Androidには独自のセンサー、センサー、および情報を表示する画面があります
-AndroidとArduinoの両方のアプリケーションのコードを簡単に記述できます。
ロボットを構築するタスクを簡素化するために、「単純なものから複雑なものへ」メソッドを使用することを提案します。 プログラミング言語の研究のように、最初のプログラム「Hello word」を作成します。 もちろん、これは1つのプログラムではなく、少なくとも2つです(arduinoとandroidの場合)。 以降の各記事では、ロボットの機能が向上します。
問題の声明
以下を備えたシンプルなデバイスを組み立てます。
-2ボタン(b1、b2)。
-1 LED(LED)。
そして機能が実行されます:
-メインアクティビティには、「送信0」と「送信1」の2つのボタンが含まれ、押されると、データはそれぞれ「0」と「1」でBTチャンネルを介してアンドロイドからArduinoに転送され、Arduinoはそれらを処理してLEDを点灯または消灯します。
-Arduinoでボタンを押したり放したりすることに関するデータがAndroidに転送され、これに関する情報がメインアクティビティの画面に表示されます。
必要な部品とアセンブリの購入。
1)Androidデバイス-LG P500スマートフォン(Androidバージョン2.3.3)、またはバージョン2.3.3以降を搭載したその他のAndroidデバイス。 個別に購入したわけではないため、価格を表示しませんが、スマートフォンを使用します。
2)Arduino NanoV3.0(
dx.com/en/p/nano-v3-0-avr-atmega328-p-20au-module-board-usb-cable-for-arduino-118037 )
-11.32ドル
3)Bluetoothモジュール(
dx.com/en/p/bluetooth-board-module-4-pin-121326)-$ 10.57
4)
ブレッドボードワイヤ(
dx.com/en/p/30cm-breadboard-wires-for-electronic-diy-40-cable-pack-80207)-$ 2.51
5)ボタン-2個、LED-1個 -50ルーブル
合計:855.20ルーブル。
仕事に行こう
Arduino
利用可能な部品から回路を組み立てます(図2)
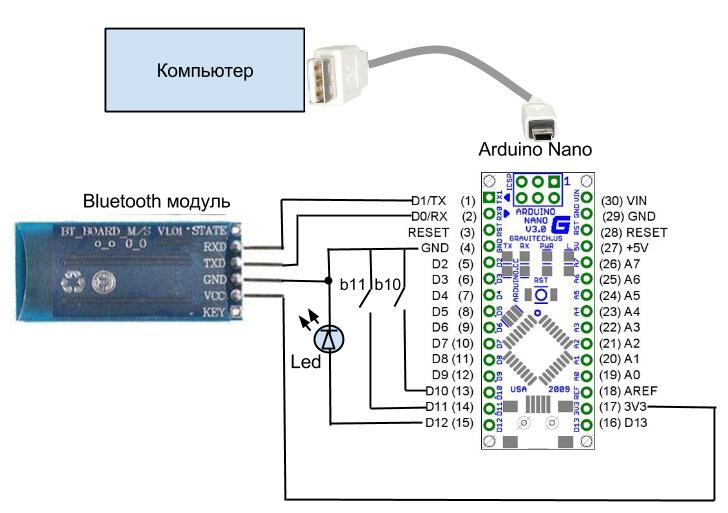
図2
コンピューターに接続するUSBケーブルを介してarduinoに電力が供給され、そこで実行されているソフトウェア(スケッチ)もダウンロードされます。 Bluetoothモジュールからの電源が切断されている場合(出力(17)3V3)にのみスケッチをarduinoにアップロードできることに注意してください。そうしないとエラーが発生します。
Arduino開発環境とドライバーのインストールの詳細は、公式Webサイト:
arduino.ru/Guide/Windowsにあります。以下は、arduinoにロードする必要があるスケッチです。
変数を宣言します。各変数にはコメントがあります。
シリアル接続を開始し、データ転送レートをビット/ c(ボー)で設定します。 BTモジュールは38400の速度で動作しますが、9600の速度が可能です(BTコマンドの速度はATコマンドを使用して設定できます)。 特定の入力/出力(ピン)の動作モードを入力または出力として設定します。 入力と出力に高い値を与えます。
void contact_bounce(int buttton)関数は、ボタンの押下を処理し、ボタンなどの機械的な切り替えデバイスで接点または接点が繰り返し開閉するときに発生する接点バウンスを排除します。
メインのループループでは、シリアルポートをリッスンし、データが到着すると、それらを処理します。 さらに、ボタンの押下を処理し、コンタクトのバウンスを排除する機能を呼び出します。
arduinoにスケッチをロードしたら、ポートモニターを実行して操作性を確認できます。 ボタンを押すと、「ボタンbを押してください」というメッセージがモニターウィンドウに表示されます。 Android向けのアプリケーションを作成した後にのみ、LEDの動作を検証することができます。
この記事では、このスケッチのみをarduinoに使用しますAndroid向けアプリケーションの開発を始めましょう。
Android
Androidアプリケーションのデバッグの利便性のために、「Android仮想デバイス」ではなく、「デバッグ」モードでUSBケーブルを介してコンピューターに接続されたAndroid OSバージョン2.3.3の実際のスマートフォンを使用することをお勧めします。 これを行う方法に関する膨大な数の記事があります。
Androidステップ1
新しいプロジェクト「Android application project」を作成します
BTを使用するには、BTをアプリケーションで使用する権利を設定する必要があります。 これを行うには、マニフェストに移動し、[アクセス許可]タブを選択して[追加]をクリックし、[アクセス許可を使用]をクリックして、次の権限を設定します。android.permission.BLUETOOTH、android.permission.BLUETOOTH_ADMIN
次に、メインアクティビティを作成し、res / layout / activity_main.xmlにコードを配置します。
<LinearLayout xmlns:android="http://schemas.android.com/apk/res/android" android:layout_width="fill_parent" android:layout_height="fill_parent" android:orientation="vertical" > <LinearLayout android:layout_width="match_parent" android:layout_height="wrap_content" > <Button android:id="@+id/b1" android:layout_width="wrap_content" android:layout_height="wrap_content" android:text=" "0"" /> <Button android:id="@+id/b2" android:layout_width="wrap_content" android:layout_height="wrap_content" android:text=" "1"" /> </LinearLayout> <TextView android:id="@+id/txtrobot" android:layout_width="wrap_content" android:layout_height="wrap_content" android:text=" " /> </LinearLayout>
したがって、主なアクティビティは次の形式になります。

図3
txtrobotテキストボックスには、必要なすべての情報が表示されます。 ボタンb1およびb2は、arduinoにコマンドを送信します。
ここでsrc /../ MainActivity.javaに移動すると、メインコードが配置されます。 Bluetooth用のApiパッケージを接続します。
import android.bluetooth.*;
BTを使用する前に、BTがAndroidに存在することを確認する必要があります。 BluetoothAdapterクラスのインスタンスを作成してみましょう(AndroidにインストールされたBTモジュールの操作を担当します):
btAdapter = BluetoothAdapter.getDefaultAdapter();
AndroidにBTがない場合、nullが返されます。
TextView mytext = (TextView) findViewById(R.id.txtrobot); if (btAdapter != null){ mytext.setText("Bluetooth "); }else { mytext.setText("Bluetooth "); }
このフォームでは、プログラムをすでに起動できます。 Android画面に「Bluetoothが存在します」という碑文が表示されます。
ここで、BTがオンになっていることを確認するか、オンにすることを申し出る必要があります。 定数を追加します。
private static final int REQUEST_ENABLE_BT = 1;
およびコード:
if (btAdapter.isEnabled()){ mytext.setText("Bluetooth . ."); }else { Intent enableBtIntent = new Intent(BluetoothAdapter.ACTION_REQUEST_ENABLE); startActivityForResult(enableBtIntent, REQUEST_ENABLE_BT); }
変更されたアプリケーションをAndroidで起動すると、「Bluetoothをオンにする許可のリクエスト」が表示され、確認されてBTがアクティブになります。
完全なアプリケーションコード:
package com.robot.bluetest; import android.os.Bundle; import android.app.Activity; import android.widget.TextView; import android.bluetooth.*; import android.content.Intent; public class MainActivity extends Activity { private static final int REQUEST_ENABLE_BT = 0; public BluetoothAdapter btAdapter; public TextView mytext; @Override protected void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceState); setContentView(R.layout.activity_main); btAdapter = BluetoothAdapter.getDefaultAdapter(); mytext = (TextView) findViewById(R.id.txtrobot); if (btAdapter != null){ if (btAdapter.isEnabled()){ mytext.setText("Bluetooth . ."); }else { Intent enableBtIntent = new Intent(BluetoothAdapter.ACTION_REQUEST_ENABLE); startActivityForResult(enableBtIntent, REQUEST_ENABLE_BT); } }else { mytext.setText("Bluetooth "); } } }
Androidステップ2
さらなる実験を行うには、AndroidとBTモジュールを「ペアリング」する必要があります。このため、BT設定のAndroidで検索を実行し、BTモジュールに接続します。パスワードは「1234」です。
突然リモートBTモジュールが正常に機能しない場合は、すべてのワイヤ(VCC、GND、RX、TX)を切断してハードリセットを行い、それらを再接続してください-これが役立つはずです。
次に、プログラムでリモートBTモジュールに接続してみましょう。メイン接続コードをonResumeに配置します。 onResumeはアクティビティの状態の1つです。つまり、アクティビティは画面に表示され、フォーカスがあり、ユーザーはそれと対話できます。 主なアクティビティコードは次のとおりです。
package com.robot.bluetoothrob2; import java.io.IOException; import android.os.Bundle; import android.app.Activity; import android.util.Log; import android.widget.Button; import android.widget.TextView; import android.widget.Toast; import android.bluetooth.*; import android.content.Intent; public class MainActivity extends Activity { private static final int REQUEST_ENABLE_BT = 0; final String LOG_TAG = "myLogs"; public BluetoothAdapter btAdapter; private BluetoothSocket btSocket = null;
リモートBTモジュールへのアクセスは、MACアドレスbtAdapter.getRemoteDevice(MacAdress)によって取得されます。 Android用プログラム:Bluetooth Terminalを使用して、BTモジュールのMACアドレスを確認できます。
BTモジュールへのアクセスが確実に取得されるようにするには、getName()メソッドを使用します。これにより、リモートBTモジュールの名前を取得し、Android画面に結果を表示できます。
また、この例では、ログを維持する機能が追加されました。これは、プログラムの実行中に表示され、既存のエラーを検出できます。 さらに、アプリケーションをクラッシュさせる必要がある場合に呼び出される関数MyErrorが作成されました。
アプリケーションを起動すると、リモートBTモジュールの名前がAndroid画面の「txtrobot」テキストボックスに表示されます。
Androidステップ3
リモートBTモジュールへのアクセスが取得されました。次のステップは、Androidからモジュールにデータを転送することです。 onResume()でこれを行うには、ソケットを作成します。
btSocket = device.createRfcommSocketToServiceRecord(MY_UUID);
ここで、UUID(Universally Unique Identifier)は、ソフトウェア開発で使用される識別標準です。 UUID定数を定義に追加します。
private static final UUID MY_UUID = UUID.fromString("00001101-0000-1000-8000-00805F9B34FB");
接続が遅くならないように、他のBTデバイスの検索をキャンセルします。
btAdapter.cancelDiscovery();
接続してみましょう:
btSocket.connect();
成功しない場合は、ソケットを閉じます。
btSocket.close();
データの送受信方法はブロックしているため、メインアプリケーションがフリーズしないように、別のスレッドで実行する必要があります。 これを行うには、クラスを作成します。
パブリックConnectedThred(BluetoothSocketソケット)のコンストラクターで、ソケットを介したデータの送信を制御するオブジェクトが作成されます。
tmpOut = socket.getOutputStream();
メインアクティビティからデータを送信するには、テキストメッセージパラメーターを使用してsendData(文字列メッセージ)メソッドを呼び出します。このパラメーターは、バイト型に変換されます。 cancel()メソッドを使用すると、ソケットを閉じることができます。
sendData(String message)関数への呼び出しを含むボタンb1およびb2を押すためのハンドラーを作成し、これをログに記録します。 完全なアプリケーションコードを以下に示します。
package com.robot.bluetoothrob2; import java.io.IOException; import java.io.OutputStream; import java.net.Socket; import java.util.UUID; import com.robot.bluetoothrob2.R; import android.os.Bundle; import android.app.Activity; import android.util.Log; import android.view.View; import android.view.View.OnClickListener; import android.widget.Button; import android.widget.TextView; import android.widget.Toast; import android.bluetooth.*; import android.content.Intent; public class MainActivity extends Activity { private static final int REQUEST_ENABLE_BT = 1; final String LOG_TAG = "myLogs"; private BluetoothAdapter btAdapter = null; private BluetoothSocket btSocket = null; private static String MacAddress = "20:11:02:47:01:60";
作成したアプリケーションでは、BTを介してAndroidからarduinoにデータを転送できます。「0」と「1」は、arduinoのコマンド「1」-LEDを点灯し、「0」-消灯します。 したがって、ロボットの一般的なスキームを考慮して、「脳」から「筋肉」にコマンドを与えることを学びました。 「感覚」からのデータを受け入れるようにアンドロイドに教えることは、小さな場合のケースです。
Androidステップ4
データの受信と送信は、メインアクティビティのハングを回避するために、別のスレッドで実行する必要があります。 BTモジュールから受信したデータを、メインアクティビティの画面のテキストフィールド-MyTextに表示します。 しかし、問題が発生します-ビューコンポーネントの操作は、メインストリームからのみ利用可能です。 そして、私たちが作成する新しいスレッドは、画面要素にアクセスできません。 この問題を解決するには、ハンドラーメカニズムを使用します。
ハンドラーは、メッセージキューを操作できるメカニズムです。 特定のスレッド(スレッド)に接続され、そのキューで動作します。 ハンドラーはメッセージをキューに入れることができます。 同時に、彼はこのメッセージの受信者として自分自身を置きます。 そして、時間が来ると、システムはメッセージをキューから削除し、処理のために受信者(つまり、ハンドラー内)に送信します。
ハンドラーの宣言:
Handler h;
ハンドラーを作成します。
h = new Handler() { public void handleMessage(android.os.Message msg) { switch (msg.what) { case ArduinoData: byte[] readBuf = (byte[]) msg.obj; String strIncom = new String(readBuf, 0, msg.arg1); mytext.setText(" Arduino: " + strIncom); break; } }; };
handleMessageメッセージ処理メソッドを実装します。 メッセージからwhat、obj属性、およびint型の引数を抽出します。 受信したメッセージを文字列に変換し、メインアクティビティのテキストフィールドに表示します。mytext.setText( "Arduinoのデータ:" + strIncom);
データ転送用のストリームに、このストリームを開始する関数を追加し、そこにデータを読み取るための関数でサイクルを配置します。
public void run() { byte[] buffer = new byte[1024]; int bytes; while(true){ try{ bytes = InStrem.read(buffer); h.obtainMessage(ArduinoData, bytes, -1, buffer).sendToTarget(); }catch(IOException e){break;} } }
完全なアプリケーションコードを以下に示します。
package com.robot.bluetoothrob2; import java.io.IOException; import java.io.InputStream; import java.io.OutputStream; import java.net.Socket; import java.util.UUID; import com.robot.bluetoothrob2.R; import android.os.Bundle; import android.os.Handler; import android.app.Activity; import android.util.Log; import android.view.View; import android.view.View.OnClickListener; import android.widget.Button; import android.widget.TextView; import android.widget.Toast; import android.bluetooth.*; import android.content.Intent; public class MainActivity extends Activity { private static final int REQUEST_ENABLE_BT = 1; final int ArduinoData = 1; final String LOG_TAG = "myLogs"; private BluetoothAdapter btAdapter = null; private BluetoothSocket btSocket = null; private static String MacAddress = "20:11:02:47:01:60";
ステップ4では、AndroidからarduinoにBTコマンドを送信し、arduinoからデータを受信できるようにするアプリケーションが表示されます。 したがって、コマンドを与えてデータを受信することを学び、タスクを完了しました。
さらに、このアプリケーションはテンプレートなので、より複雑なアプリケーションを作成できます。これにより、たとえば超音波センサーからのデータを処理したり、モーターにコマンドを与えてロボットを動かしたりできます。
次の記事では、新しい部品とモジュールを注文しました。 以下はリストと価格です。
合計:1933.8