前回の記事では、
Android、arduino、bluetoothに基づくROBOT。 最初は、ロボットの一般的なスキームによって提案され、AndroidとArduino間のデータ送受信の技術を提示しました。 そして、最後に注文した部品とモジュールのリストがあります。 詳細を受け取り(図1)、コメントを考慮し、最初のロボットである反射型ロボットの作成に進みます。

図1
目次
記事1.に基づくロボット:android、arduino、bluetooth。 開始する記事2.に基づくロボット:android、arduino、bluetooth。 再帰的。 パート2
記事を読んでいる人はすでに次のことを考えていると想定されます。
-エレクトロニクスの基本概念
-前の記事
問題の声明
次の機能を実行するロボットを作成します。
-スマートフォンを使用したリモートコントロール(前方、後方、左、右)
-スマートフォンの前にある物体までの距離に関するデータを送信します(超音波センサーに基づく)
-自律制御モードがあります:障害物に遭遇すると、部屋の周りを連続的に移動し、移動方向を変更して、障害物を旋回させます。
理論のビット
私たちの世界は複雑なシステムであり、膨大な数のオブジェクトが特定の物理法則に従って相互作用するため、このシステム内で機能するロボットを作成することは非常に骨の折れる作業です。 最初のロボットを作成するプロセスを簡素化するために、環境(ロボットが配置される)とロボットのアクションを抽象化するという概念を使用します。 さらなる記事では、環境を複雑にし、それに応じてロボットの動作を複雑にします。
抽象環境
最初のロボットが住む環境は2次元の世界であり、次の特徴があります。
1)完全に観察可能、すなわち ロボットセンサーは、いつでも環境の状態に関する完全な情報へのアクセスを提供します。 ロボットは、この世界で起こるすべてを認識するために内部状態を維持する必要がないため、完全に観察可能な環境のバリエーションが便利です。
2)確定的。 媒体の次の状態が現在の状態とロボットによって実行されるアクションによって完全に決定される場合、そのような媒体は決定論と呼ばれます。 それ以外の場合、確率的です。
3)エピソード。 一時的な問題の環境では、ロボットの体験は複雑なエピソードで構成されます。 各エピソードには、ロボットによる環境の認識と、1つのアクションの実行が含まれます。 さらに、次のエピソードが前のエピソードで実行されたアクションに依存しないことが非常に重要です。 環境のエピソードバージョンでは、各エピソードでのアクションの選択は、エピソード自体にのみ依存します。
4)静的。 ロボットが次のアクションを選択する途中で環境が変化する可能性がある場合、そのような環境はロボットの動的と呼ばれます。 それ以外の場合は静的です。
5)連続-媒体の離散バージョンと連続バージョンの違いは、媒体の状態、時間の考慮方法、エージェントの認識とアクションに関連する可能性があります。 私たちの場合、環境の状態は継続的に変化すると考えられています。 たとえば、チェスのゲームは、有限数の異なる状態を持っているため、離散的です。
6)シングルエージェントは、1つのオブジェクト(ロボット)が配置されている環境であり、他のオブジェクトはそれに影響を与えず、競合しません。
ロボットの動作の抽象化
1)移動-ロボットは2方向(前後)に移動し、その場で向きを変えることができます(左、右)
2)ロボットセンサー(超音波センサー)、オブジェクトまでの距離を決定できます。 距離は0.02メートルから4メートルまで決定できます。
したがって、この記事で作成したロボットは単純な反射型ロボットであると判断します。 このようなロボットは、現在の知覚行為に基づいて行動を選択し、知覚行為の残りの履歴を無視します。
使用される部品とモジュールに関する簡単な情報
HG7881エンジンドライバー。 ロボットのモーターを制御するには、低電力の制御信号をモーターを制御するのに十分な電流に変換するデバイスが必要です。 このようなデバイスは、エンジンドライバーと呼ばれます。
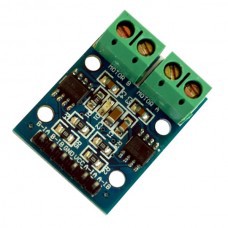
HG7881は2チャンネルエンジンドライバーです。2.5〜12 Vの電源から電力を供給できます。ドライバー出力の説明:
表1
| おわりに | 説明 |
| B-ia | エンジンB入力A(IA) |
| B-ib | エンジンB入力B(IB) |
| GND | 地球(マイナス) |
| Vcc | 動作電圧2.5-12V(プラス) |
| A-IA | エンジンA入力A(IA) |
| A-ib | エンジンA入力B(IB) |
エンジンを必要な方法で動作させるには、出力(B-IA、B-IB、A-IA、A-IB)に論理信号(HIGH、LOW)を供給する必要があります。 エンジンの真理値表:
表2
| IA | IB | エンジン状態 |
| L | L | オフ |
| H | L | 進む |
| L | H | 逆 |
| H | H | オフ |
超音波距離センサーHC-SR04。 オブジェクトからの音波の反射時間を測定することにより、オブジェクトまでの距離を決定します。

センサーは短い超音波パルスを発し(時間0)、物体から反射してセンサーが受信します。 距離は、エコーが受信されるまでの時間と空気中の音速に基づいて計算されます。
10μsのパルスが出力(Trig)に送信され、超音波モジュールは周波数40 kHzの超音波信号を8パック放出し、エコーを検出します。 オブジェクトまでの測定距離はエコーの幅に比例し(エコー)、次の式で計算できます。
パルス幅/ 58 =距離(cm)。
ロボットの組み立てとすべてのモジュールの接続
プラットフォームを組み立てます(図2)。
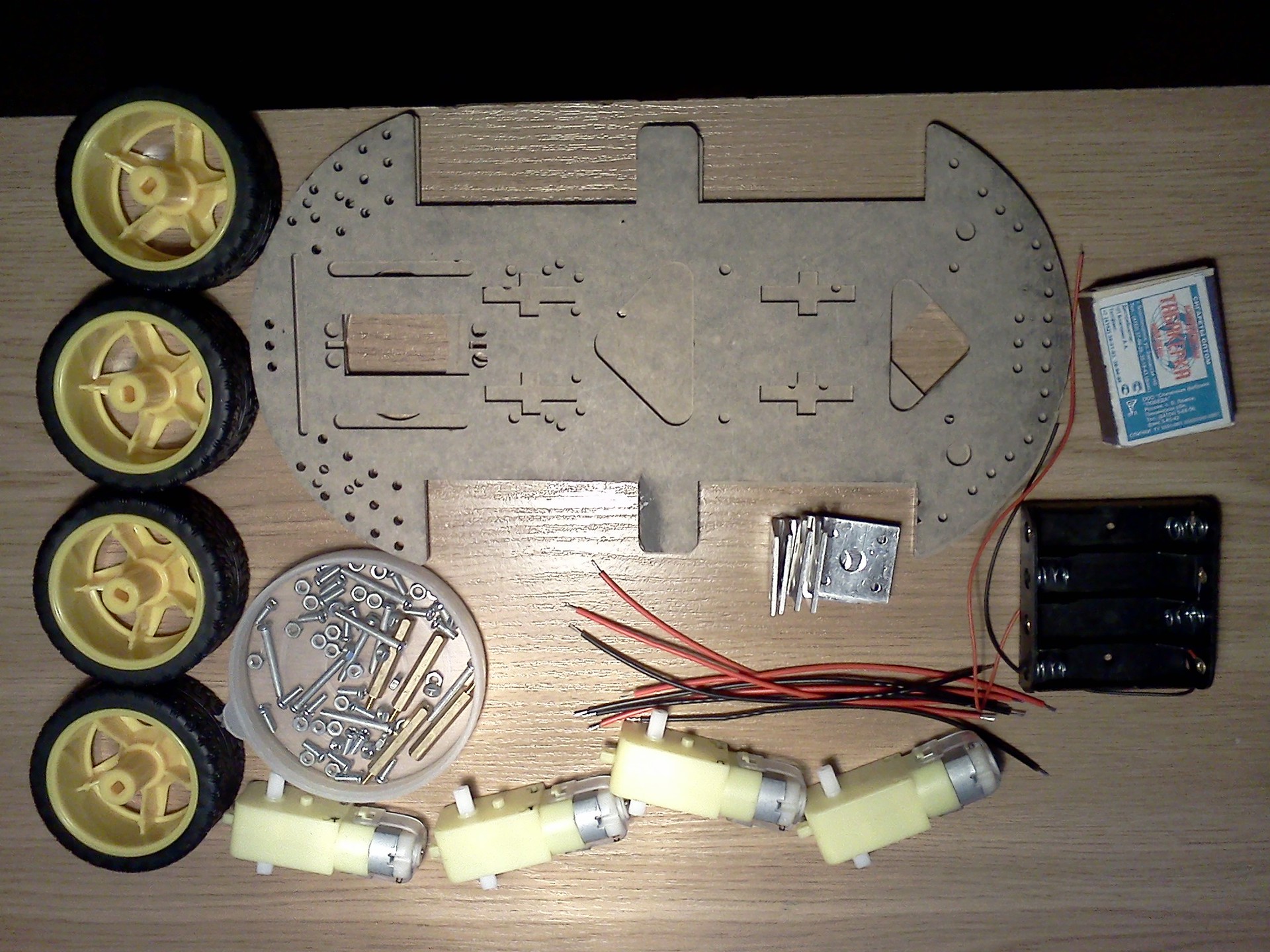
図2
エンジンをドライバーに接続します(図3)。 ドライバーコネクタごとに2つのモーター、つまり プラットフォームの左側のモーターを「モーターB」コネクターに、右側のモーターを「モーターA」に接続します。 プラットフォームは、追跡されるプラットフォームと同様に制御されます。 前後に移動する場合、すべてのエンジンは一方向に同期して動作し、右に曲がるとプラットフォームの右側のエンジンが停止し、左に曲がると左側のエンジンが停止し、右にエンジンが同期して動きます。
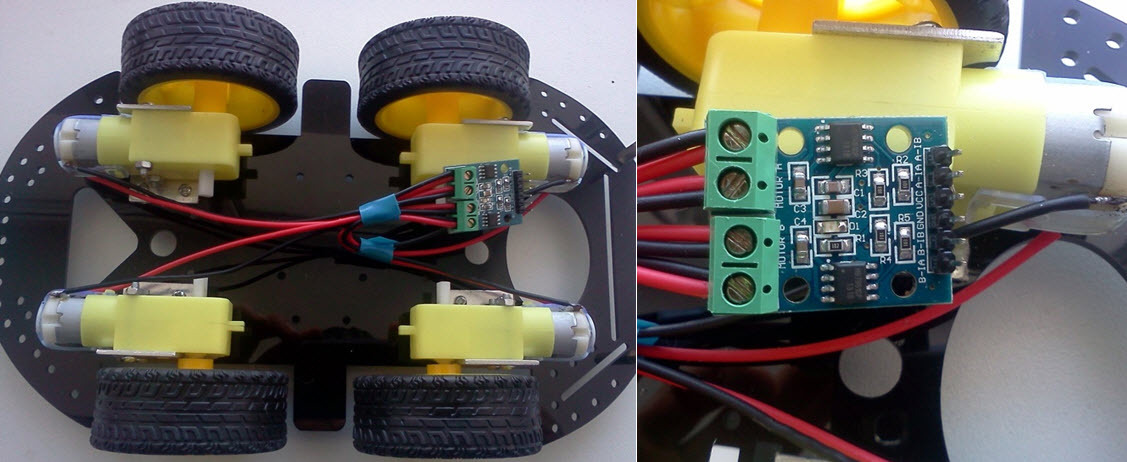
図3
プラットフォームの上部を固定します。 エンジンドライバー、arduino、バッテリー、BTモジュール、および超音波センサーをブレッドボードに接続します(図4)
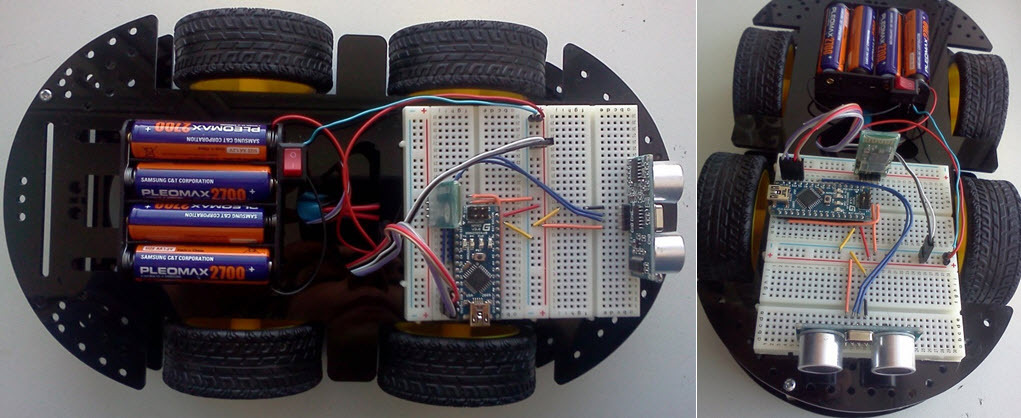
図4
接続図を(図5)に示します。 Arduino、超音波センサー、エンジンドライバー(したがってエンジン自体)は、直列に接続された4つのバッテリー(1.2 V、2700 mA / h)で駆動され、BTモジュールには3.3 VのArduino出力から電力が供給されます。
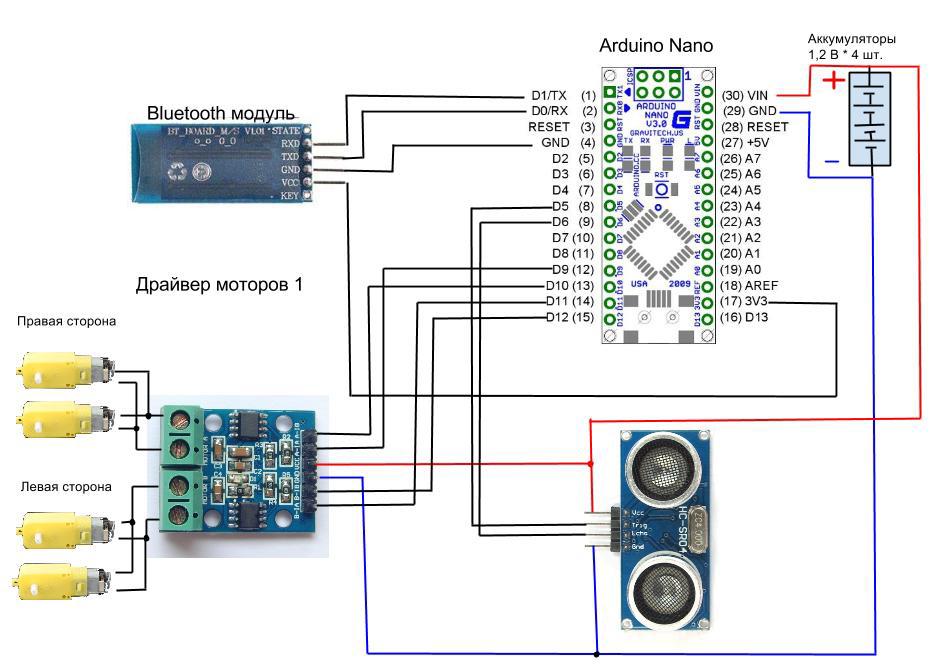
図5
ロボットは組み立てられています。アンドロイドから送信されたコマンドを実行するように強制する必要があります。
Arduino STEP 1のスケッチ-リモートロボット制御
前にBTモジュールから電源を切断することを忘れずに、スケッチをarduinoにロードします(そうしないとロードできません)。
変数を宣言します:R_A_IA、R_A_IB-エンジンAを制御する端末の番号を決定します(右側のエンジン)、L_B_IA、L_B_IB-エンジンBを制御する番号の結論(左側のエンジン。シリアル接続を開始し、データ転送速度をビット/ c(ボー)-38400で設定します。モーターを制御する端末の動作モード-出力(出力)を設定し、すべての出力にHIGHを適用します(つまり、モーターがオフになります)(表2)。
関数を定義します:go_forward()、go_back()、go_right()、go_left()、stop_robot()、これらはエンジンを回転の順方向または逆方向に開始し、それによってロボットを前進、後退、右、左、停止、それに応じて。
メインプログラムサイクルでは、BTモジュールから受信してシリアルポートに処理されたデータが読み取られて処理されます。 受信したコマンドに応じて、1つまたは別の機能が実行され、その実行に関するテキストがシリアルポート経由で送信されます。
Androidアプリケーションステップ1-ロボットをリモートコントロールする
新しいプロジェクト「Android application project」を作成します。 前の記事で書いたように、BTを使用するには、BTをアプリケーションで使用する権利を設定する必要があります。 これを行うには、マニフェストに移動し、[アクセス許可]タブを選択して[追加]をクリックし、[アクセス許可を使用]をクリックして、次の権限を設定します。android.permission.BLUETOOTH、android.permission.BLUETOOTH_ADMIN
メインアクティビティを作成し、res / layout / activity_main.xmlにコードを配置します。
コアアクティビティステップ1 <LinearLayout xmlns:android="http://schemas.android.com/apk/res/android" android:layout_width="fill_parent" android:layout_height="fill_parent" android:orientation="vertical" > <TextView android:id="@+id/txtrobot" android:layout_width="wrap_content" android:layout_height="wrap_content" android:text=" " /> <LinearLayout android:layout_width="match_parent" android:layout_height="wrap_content" > <Button android:id="@+id/b1" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_weight="100" android:text="" /> </LinearLayout> <LinearLayout android:layout_width="match_parent" android:layout_height="wrap_content" > <LinearLayout android:layout_width="wrap_content" android:layout_height="match_parent" android:layout_weight="100" > <Button android:id="@+id/b4" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_weight="100" android:text="" /> <Button android:id="@+id/b0" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_weight="100" android:text="" /> <Button android:id="@+id/b3" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_weight="100" android:text="" /> </LinearLayout> </LinearLayout> <LinearLayout android:layout_width="match_parent" android:layout_height="wrap_content" > <Button android:id="@+id/b2" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_gravity="center" android:layout_weight="100" android:text="" /> </LinearLayout> </LinearLayout>
これは、メインアクティビティの外観です。
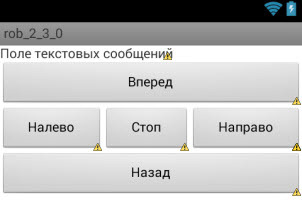
txtrobotテキストボックスには、必要なすべての情報が表示されます。 ボタンb0、b1、b2、b3、b4は、arduinoにコマンドを送信します(0、1、2、3、4)
ここでsrc /../ MainActivity.javaに移動すると、メインコードが配置されます。
前の記事のステップ4で、BTでデータを送受信できるコードが提示されました。 このコードを基礎としてみましょう。
onPause()およびonResume()アクティベーション状態では、AndroidでのBTの存在を確認し、それが有効になっているかどうかを判断するための条件を追加します。 前の記事では、BTが無効になっている場合にアプリケーションを起動すると、エラーで終了し、その後BTをオンにすることを提案したため、この条件は存在しませんでした。
if (btAdapter != null){ if (btAdapter.isEnabled()){
ボタンを保存するための変数を宣言します。
Button b0, b1, b2, b3, b4;
IDで検索:
b0 = (Button) findViewById(R.id.b0);
これらのボタンを押してコマンドを送信するためのハンドラーを作成します。
b0.setOnClickListener(new OnClickListener() { public void onClick(View v) { MyThred.sendData("0"); } }); b1.setOnClickListener(new OnClickListener() { public void onClick(View v) { MyThred.sendData("1"); } }); b2.setOnClickListener(new OnClickListener() { public void onClick(View v) { MyThred.sendData("2"); } }); b3.setOnClickListener(new OnClickListener() { public void onClick(View v) { MyThred.sendData("3"); } }); b4.setOnClickListener(new OnClickListener() { public void onClick(View v) { MyThred.sendData("4"); } });
完全なアプリケーションコード:
アプリケーションコードステップ1 package com.example.rob_2_3_0; import java.io.IOException; import java.io.InputStream; import java.io.OutputStream; import java.util.UUID; import com.example.rob_2_3_0.R; import android.os.Bundle; import android.os.Handler; import android.app.Activity; import android.util.Log; import android.view.View; import android.view.View.OnClickListener; import android.widget.Button; import android.widget.TextView; import android.widget.Toast; import android.bluetooth.*; import android.content.Intent; public class MainActivity extends Activity { private static final int REQUEST_ENABLE_BT = 1; final int ArduinoData = 1; final String LOG_TAG = "myLogs"; private BluetoothAdapter btAdapter = null; private BluetoothSocket btSocket = null; private static String MacAddress = "20:11:02:47:01:60";
このアプリケーションでは、Androidを使用してロボットを制御し、BTコマンドをArduinoに送信し、そこからテキスト応答を受信できます。 タスクの最初の部分が完了しました。
Arduino STEP 2のスケッチ-自律ロボット制御モード
超音波センサーを使用するには、既製のライブラリを使用します
超音波-HC-SR04.zipファイルを解凍し、スケッチが配置されているディレクトリに配置します
ライブラリを接続する
#include "Ultrasonic.h"
Ultrasonicコンストラクターは、TrigとEchoがそれぞれ接続されるピン番号の2つのパラメーターを受け入れます。
Ultrasonic ultrasonic(5, 6);
オブジェクトまでの距離に関するデータをセンチメートル単位で取得します。
float dist_cm = ultrasonic.Ranging(CM);
BTモジュールを介した後続の送信のために、シリアルポートにデータを転送します。
Serial.print("*"); Serial.print(dist_cm); Serial.print("#");
記号「*」および「#」は、オブジェクトまでの距離に関する情報の送信ブロックの開始と終了を意味します。 これは、必要なデータを相互に明確に分離するために必要です。なぜなら、それらが転送されると、一部が失われたり遅れたりするからです。
Arduinoでロードするための完全なスケッチ:
Androidアプリケーションステップ2-ロボットの自律制御
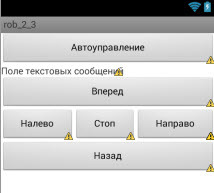
ボタン「b5」(自動制御)をメインアクティビティに追加します。 コードは次のとおりです。
コアアクティビティステップ2 <LinearLayout xmlns:android="http://schemas.android.com/apk/res/android" android:layout_width="fill_parent" android:layout_height="fill_parent" android:orientation="vertical" > <LinearLayout android:layout_width="match_parent" android:layout_height="wrap_content" > <Button android:id="@+id/b5" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_weight="1" android:text="" /> </LinearLayout> <TextView android:id="@+id/txtrobot" android:layout_width="wrap_content" android:layout_height="wrap_content" android:text=" " /> <LinearLayout android:layout_width="match_parent" android:layout_height="wrap_content" > <Button android:id="@+id/b1" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_weight="100" android:text="" /> </LinearLayout> <LinearLayout android:layout_width="match_parent" android:layout_height="wrap_content" > <LinearLayout android:layout_width="wrap_content" android:layout_height="match_parent" android:layout_weight="100" > <Button android:id="@+id/b4" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_weight="100" android:text="" /> <Button android:id="@+id/b0" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_weight="100" android:text="" /> <Button android:id="@+id/b3" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_weight="100" android:text="" /> </LinearLayout> </LinearLayout> <LinearLayout android:layout_width="match_parent" android:layout_height="wrap_content" > <Button android:id="@+id/b2" android:layout_width="wrap_content" android:layout_height="wrap_content" android:layout_gravity="center" android:layout_weight="100" android:text="" /> </LinearLayout> </LinearLayout>
内容
したがって、主なアクティビティは次の形式になります。
変数b5を宣言します。
Button b0, b1, b2, b3, b4, b5;
また、自動制御が有効になっているかどうかを判別できるフラグ:
boolean fl=false;
IDで検索:
b5 = (Button) findViewById(R.id.b5);
押すためのハンドラーを作成します。
b5.setOnClickListener(new OnClickListener() { public void onClick(View v) { Log.d(LOG_TAG, " "); if (!fl){ Log.d(LOG_TAG, " "); fl=true; b1.setEnabled(false); b2.setEnabled(false); b3.setEnabled(false); b4.setEnabled(false); MyThred.sendData("1"); Log.d(LOG_TAG, " 1"); } } });
また、ボタンハンドラ "b0"(停止)に変更を加えます。
b0.setOnClickListener(new OnClickListener() { public void onClick(View v) { MyThred.sendData("0"); if (fl) { fl = false; b1.setEnabled(true); b2.setEnabled(true); b3.setEnabled(true); b4.setEnabled(true); } } });
ロボットが独立して部屋を動き回り、障害物を迂回できるようにするアルゴリズムを作成することは残っています。
arduinoから送信されたオブジェクトまでの距離に関する受信データを処理します。 オブジェクトまでの距離が50 cm未満の場合は、右に曲がります。それ以外の場合は、まっすぐに食べます。
byte[] readBuf = (byte[]) msg.obj; String strIncom = new String(readBuf, 0, msg.arg1); sb.append(strIncom);
完全なアクティビティコードは次のとおりです。
アプリケーションコードステップ2 package com.robot.rob_2_3; import java.io.IOException; import java.io.InputStream; import java.io.OutputStream; import java.net.Socket; import java.util.UUID; import com.robot.rob_2_3.R; import android.os.Bundle; import android.os.CountDownTimer; import android.os.Handler; import android.app.Activity; import android.util.Log; import android.view.View; import android.view.View.OnClickListener; import android.widget.Button; import android.widget.TextView; import android.widget.Toast; import android.bluetooth.*; import android.content.Intent; public class MainActivity extends Activity { private static final int REQUEST_ENABLE_BT = 1; final int ArduinoData = 1; final String LOG_TAG = "myLogs"; private BluetoothAdapter btAdapter = null; private BluetoothSocket btSocket = null; private static String MacAddress = "20:11:02:47:01:60";
提示されたarduinoのスケッチと連動して作成されたAndroidのアプリケーションは、ロボットを独立してリモート制御することも、ロボットが前方に移動し、必要に応じて障害物を回避する自律制御モードをオンにすることもできます。
この作業の結果は、最も単純な反射ロボットです。 特定のテンプレートアプリケーションとスケッチに基づいたより複雑なアルゴリズムをさらに適用すると、モデル、目標、ユーティリティ、学習ロボットなどに基づいてロボットを作成できます。
次の記事では、たった1つのモジュールを注文しました。
合計:524.65
前の記事へのコメントで、ハブユーザーの司令官は、車輪を再発明するのではなく、標準のFirmataプロトコル(arduinoとサーバー間でデータを交換するためのプロトコル)を使用することを推奨しました。 残念ながら、BTと連動したAndroidの実行可能なライブラリは見つかりませんでした。 ライブラリを書くのに十分な時間とエネルギーがないので、この記事ではホイールの再発明を続けます。 Habrユーザーの誰かがそのようなライブラリに関する情報を持っている場合は、共有してください。