最近、Linux環境ですべての開発ツールをstm32コントローラ用にアセンブルする方法に関する
素晴らしい記事に出会い、すでに解決しようとしていたタスク、つまりMac OS Xですべてが同じように動作するようにすることに戻りました10.9.1 Mavericks)、仮想マシンでCooCox(特にEclipseに基づいている)で作業するのは、すでにかなり疲れています。 この記事では、OS Xで同じ作業を行う方法について、段階的なアルゴリズムを説明します。
したがって、Mac OS X環境のSTM32で開発し、ST-LINK V2を個別に、またはブレッドボード上で使用して、catにようこそ。
一般的に、マイクロチップを除き、Pic用の開発用のクロスプラットフォームMPLAB X(少なくとも私はそれだけを知っています)を除き、特定のエントリしきい値を作成するWindows以外のプラットフォームの開発者を気にしているメーカーはありません。もちろん、あなたがArduino開発ツールのユーザーでない限り、多くの開発者を怖がらせます。
OS Xで説明されている
futurelinkのアルゴリズム全体を利用して
満足できないのはなぜですか? アップルは私たちのことを気にかけているため、リポジトリからパッケージをインストールしてビルドするために必要なすべてのコンポーネントをシステムから切り取っているためです。 パッケージマネージャー自体も欠落しています。主なパラダイムは、すべてをAppStore経由で設定する必要があることです。極端な場合、プログラムはご自身の責任で「インストールされていないソース」からダウンロードする必要があります=)。 しかし、すべてが見た目ほど悪いわけではありません。これらの致命的な欠陥はすべて正常に排除できます。同時に、これを支援する強力なツールで
あるパッケージマネージャーを知ることができます。
準備する
通常、現時点では、AppStoreからXcodeをインストールし、コマンドラインツール(必要な)をインストールする必要があることを誰もが書いています。ただし、Xcodeで何も開発しない場合は、この方法も使用できますssd)に配置してから、コマンドラインツールを個別に配置できます。 次に強調表示されるすべてのコマンドは、ターミナルで実行する必要があります。
方法1:
ターミナルに入力するだけです:
make
Maverickでは、ビューウィンドウがすぐに表示されなくなります。
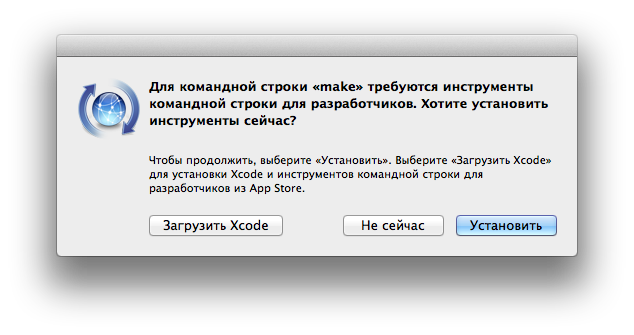
[インストール]をクリックして、Xcodeを使用せずに必要なユーティリティをすべて入手します。
方法2:
イメージを手動でダウンロードしてインストールします。
マウンテンライオンの画像マーベリックスの画像これらすべての操作の後、make、gcc、gitなどのユーティリティがシステムにインストールされます。
パッケージマネージャーのインストール
幸いなことに、グローバルなオープンソースコミュニティはMacユーザーを困らせず、この点でいくつかのソリューションを展開しました。
現時点では、
Macportsと
Brewのこれらの目的に使用できる2つの価値のあるプロジェクトがあります。 これらのマネージャーのいずれかがいる場合、他に何も置く必要はありませんが、何を置くべきかを考えている場合は、Brewを個人的にお勧めします。
Brewのインストールは簡単で簡単です。端末に行をコピーし、指示に従ってください
ruby -e "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/master/install)"
それだけです! これで、リポジトリからパッケージをインストールできるようになりました!
たとえば、Midnight Commanderを置くことができます:
brew install mc
またはwget(インストールすることをお勧めします。後で必要になります):
brew install wget
Brewを既にインストールしている場合は、次のコマンドで更新することをお勧めします。
brew update
そして、実行します:
brew doctor
しかし、私たちの主なタスク、つまりシステムとプログラマーの友達を作ることから気を散らすことはありません。
ST-LINK V2をインストールします
これで、必要なすべてのパッケージをインストールできます。これを行う利点は非常に簡単です。
brew install autoconf automake pkg-config libusb libusb-compat
これらのパッケージをインストールすると、
Texaneプロジェクトをビルドするために必要なものがすべて
揃います。
ホームディレクトリにフォルダーを作成し、それをEmbed Toolsと呼びますが、任意の便利なフォルダーで実行できます。
cd ~ mkdir "Embed Tools" && cd "Embed Tools" git clone https://github.com/texane/stlink.git && cd stlink/ ./autogen.sh ./configure make
ボードを接続してコマンドを実行します:
./st-util
すべてが順調であれば、フォームの回答が返されます。
2014-02-08T19:46:24 INFO src/stlink-usb.c: -- exit_dfu_mode 2014-02-08T19:46:24 INFO src/stlink-common.c: Loading device parameters.... 2014-02-08T19:46:24 INFO src/stlink-common.c: Device connected is: F4 device, id 0x10016413 2014-02-08T19:46:24 INFO src/stlink-common.c: SRAM size: 0x30000 bytes (192 KiB), Flash: 0x100000 bytes (1024 KiB) in pages of 16384 bytes Chip ID is 00000413, Core ID is 2ba01477. Target voltage is 2876 mV. Listening at *:4242...
互換性と
元のチュートリアルを維持するために、同じリンクを作成しますが、繰り返しますが、あなたにとって便利な場所でそれを行うことができます。リンクを作成することさえできず、日食自体ではユーティリティのインストールパスを直接参照します。
高い確率で、システムにoptディレクトリが存在しないため、作成する必要があり、同時にその中にbinディレクトリが必要です。
cd / sudo mkdir opt && cd opt sudo mkdir bin
/ opt / bin /ディレクトリにst-utilへのリンクを作成します。
sudo ln -s ~/Embed\ Tools/stlink/st-util /opt/bin/st-util
ARMツールチェーンをインストールする
GCC ARM TOOLCHAIN 4.8をダウンロードして、すべてを解凍し、Embed Toolsフォルダーに入れます。 これまでの最新のメジャーリリース、つまり4.8-2013-q4-majorをダウンロードし、それぞれ私のフォルダーはgcc-arm-none-eabi-4_8-2013q4と呼ばれます。 いくつかの異なるリリースをダウンロードし、一般に異なるツールチェーンをダウンロードして、すべてをEmbed Toolsにコピーしてから、
optlinkでそれらへのリンクを変更します(
futurelinkが示唆しているように)ツールチェーン)。
/ opt / arm-toolchainディレクトリにツールチェーンへのリンクを作成します。
sudo ln -s ~/Embed\ Tools/gcc-arm-none-eabi-4_8-2013q4/bin /opt/arm-toolchain
また、以前にwgetをインストールした人には、次のコマンドを使用できます。
cd ~/Downloads/ && wget https://launchpad.net/gcc-arm-embedded/4.8/4.8-2013-q4-major/+download/gcc-arm-none-eabi-4_8-2013q4-20131218-mac.tar.bz2 && tar -xvvjf gcc-arm-none-eabi-4_8-2013q4-20131218-mac.tar.bz2 -C ~/Embed\ Tools/ && sudo ln -s ~/Embed\ Tools/gcc-arm-none-eabi-4_8-2013q4/bin /opt/arm-toolchain
彼女はツールチェーンをダウンロードし、Embed Toolsフォルダーに展開し、/ opt / arm-toolchainにリンクを作成します。
おわりに
現在の段階では、ほとんどのユーザーは
元のチュートリアルの 開発環境セクションに進むことができます。 しかし、皆が日食にあまり精通していないため、プラグインのインストールに関するフレーズを解読できるわけではありません。
「両方の更新サイトがあります。プラグインは
メニューのクリップの
標準的な方法でインストールされ
ます。」GNU Arm Eclipse
Eclipseで[ヘルプ]-> [新しいソフトウェアのインストール]に移動します
[追加]をクリックして入力します
名前:
Gnu Arm Eclipse PlugIn場所:
http :
//gnuarmeclipse.sourceforge.net/updatesGnu Arm Eclipseリポジトリウィンドウの追加 リポジトリプラグインのリストで、チェックボックスでマークされた2つを選択します。
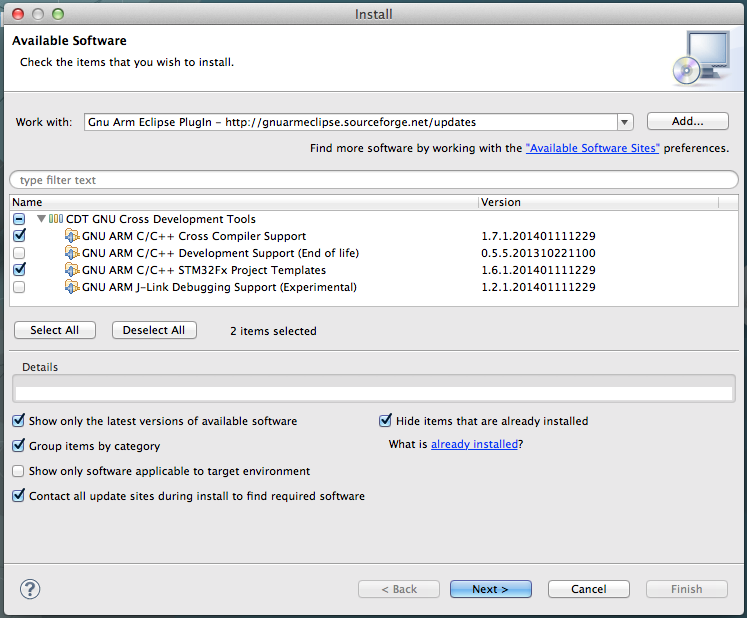
私はJ-Linkを持っていないので、実験的なプラグインをインストールしませんでしたが、誰かが試してみるかもしれません。
Zylin Embedded CDT
[追加]をクリックして入力します
名前:
Zylin Embedded CDT場所:
http :
//opensource.zylin.com/zylincdtこの場合、チェックボックスオプションのみが存在するため、マークしてください。
プラグインのインストール中に、セキュリティ警告が発行されます。これに対して肯定で答えます。
これで、CまたはC ++プロジェクトを作成し、
チュートリアルの説明に従って設定を実行するだけです。
それだけです。すべてがうまくいったことを願っています。 開発が成功することを願っています。