YouTubeでヘキサポッドに関するビデオを見た後(特にPhantomXに感銘を受けました)、ロボット工学に挑戦することにしました。 先を見据えて-すべてが判明し、結果は次のとおりです。
私は猫に興味のあるすべての人に尋ねます。それは創造の歴史と私が直面しなければならなかった困難を簡単に説明し、六脚の作品のビデオもあります。 グラフ、図、コードはなく、歌詞のみ。
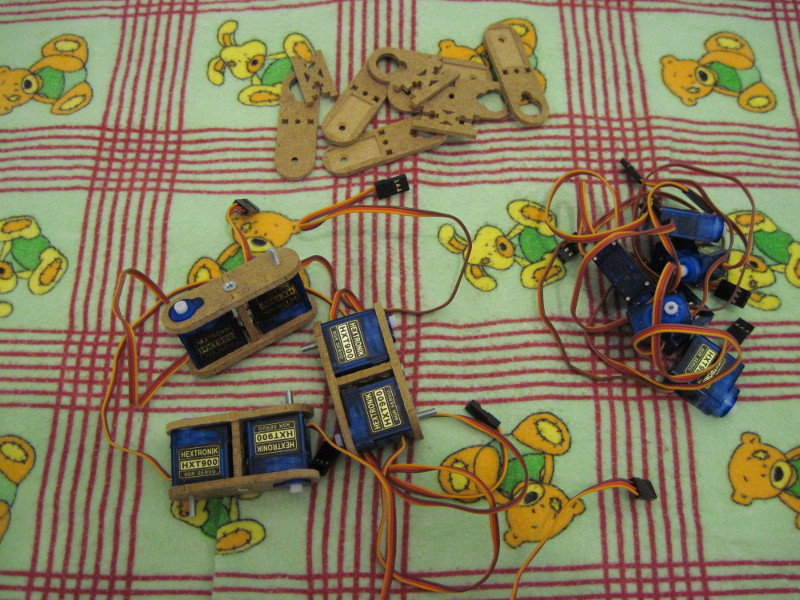
私はすでにarduinoに精通していましたが、サーボには対応していませんでした。 私は長い間、servの品揃えに精通して読んで、最終的にはミニチュア
HXT900を取ることに決めました。 Arduino Mega、
Turnigy 2200mAh 3S 20C Lipo Packバッテリー、
TURNIGY 8-15A UBECスタビライザーも注文しました。 必要なものをすべて受け取った後、彼はキャリパーですべてのサイズを脱ぎ、最初にデザインを描き始め、次にヘキサポッド自体を描き始めました。 私は素晴らしいイメージのためにPhantomXを使いました。彼のサーボがどのように配置されているかが気に入りました。 アルミニウムが不足しており、機械でプレキシガラスを切断できないため、3ミリメートルのMDFからすべての詳細を作成することにしましたが、後悔しました。 実際、ケースの素材のために、私はヘキサポッドにB.U.N.T. -ピノキオはもうありません。 サイズを小さくするために、以下の写真に見られるように、サーブの「耳」は容赦なくカットされました。
組立工程の写真2つのサーボを1つのユニットに接続します。
体の部分を切る

ケースは組み立てられていますが、この死体は私には少し厚そうに見えました-私はそれをやり直さなければならず、これはゴミ箱にありました。

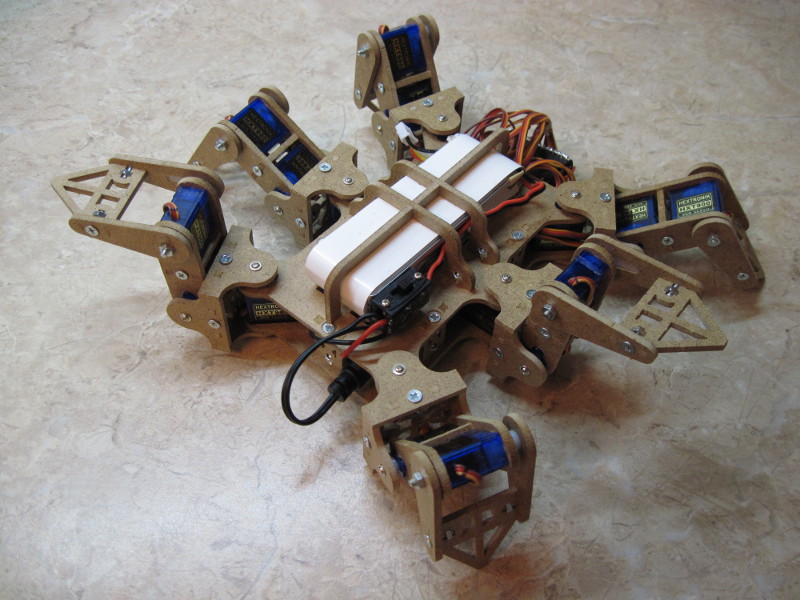
最後の仕上げ-枝肉が組み立てられ、足を固定するために残っています。

写真はほとんどありませんが、どうにかプロセスに夢中になり、写真を撮るのを完全に忘れていました。 気が付いたら-最後の2枚の写真ではバッテリーが異なって見えます-最後の1枚では既にラベルが付いていません。 注文したとき、負荷バッテリーに接続するために特定のXT60コネクターを購入する必要があるとはまったく思いもしませんでした。 その結果、コネクタとはんだを「食い込ませる」必要がありました。 不注意の私の
曲率によると、短絡が発生し、ワイヤの電圧が消えました。 充電コネクタの端子の電圧をマルチメータで測定したところ、「バンク」間の接触が消失していることがわかりました。 私はバッテリーを分解し、隙間を見つけました-アルミニウムの「花びら」(マイナス)が缶の1つで、ほとんど根元の下で燃え尽きました。 はんだ付けを試みましたが、アルミニウムははんだ付け可能な酸を使用しません。 私は動揺して、すでに新しいバッテリーを注文したかったのですが、短いグーグルでフラックスF64を購入しました。 困難を伴いながら、私は「花びら」の残骸にはんだ付けすることができ、バッテリーは蘇生しました。 さらに、組み立て段階で、メガセンサーシールドを使用するというアイデアは失敗に終わったことが判明しました。そのため、死体が厚くていことがわかりました。 図面をやり直し、カーカスの厚さをサーボドライブの高さまで減らす必要がありましたが、最終的には、サーブからカーカス自体へのワイヤが完全に適合しなかったという事実に至りました-電源が供給された部分が取り出されました。 しかし、厚い枝肉を使用するよりもさらに美しく(そしてより耐久性があります)。 MDFから小さな部品を集めるのは今でも楽しみです。 ファイルがなければ、ギャップは残りますが、接続は単純に互いに適合しません-鋭いエッジが干渉します。 全体のデザインは薄っぺらに見えますが、小さなバックラッシュがありますが、一般的には悪くなく信頼性も十分であることが判明しました。 ヘキサポッドが組み立てられ、最初のテストが行われ、完全に立脚し、重量を完全に維持していることがわかりました。 ちなみに、重量は640グラムです。 最初の実験で
は、その曲率において、コードの迷惑なエラーのために、
サーボの 1つがギアを
失いました 。 サーボを分解して変更しなければならなかったので、少しの利益を得ました。 いくつかの熟考の後、簡単でわかりやすい散歩のために小さなスケッチが書かれました。 スケッチをアップロードすることを恥ずかしく思いますが、喜んで六脚の最初のステップのビデオを見せます。
合計:
- ヘキサポッドを集めるのはそれほど難しくありません
- マイクロサーブはそれほど弱くない
- バッテリーのコネクタを軽くたたく/忘れないでください-はんだ付けは悪いアイデアです
- Servasは常に余裕を持って取ります
- 可能な場合-アルミニウム製、そうでない場合-プラスチック(プレキシガラス)、極端な場合はMDFから、そうではないが、MDFからは、まったく行わない方が良い
さらに、PS3ジョイスティックから、または少なくともスマートフォンからbluetoothを使用してヘキサポッドを制御する方法を学ぶ計画がありますが、それは別の話です。
そして、はい、私はほとんど忘れていました、すべてのコンポーネント、mdfなどは約5000ルーブルかかりました。 ジョイスティック、シールド(これは不要であることが判明しました)、およびその他の小さなもの(これもほとんど使用されませんでした)を使用すると、約6,000が得られます。 しかし、完成品の品質はPhantomXにはほど遠いですが、私はその準備ができていました。