前の
記事で 、Ubiquiti Bullet M2 HPモジュールを使用したWi-Fiブリッジの構成で、Raspberry Piに基づくHD FPVの飛行の可能性について話しました。
最初のパンケーキはゴツゴツと出てきました。 実験の結果は、彼らが言うように、「3年生は結婚ではない」、いくつかの深刻な留保と「熊手」がありましたが、実験の主な目標は達成されました。 Wi-Fi経由でHD FPVを取得するというアイデアは正常にテストされました。
予想通り、habrでの公開
はChSVのカルマを
不当に過大評価するだけでなく
、habrasocietyの意見を聞き、非常に価値のある推奨事項と実践的なアドバイスを得ることができます。 記事へのコメントでは、アドバイスが受け取られ、少し後に理解され、3日目に実施されました。
実装、修正、補足されたもの
- 実験1.円偏波のアンテナを使用しました。 地面と船上にある「クローバー」。
- 実験2.直線偏波アンテナを使用しました。 地上セクター70grad x 70gradでは、「ピン」に乗っています。
- さらに分析するために、受信したビデオストリームを地面に記録します。
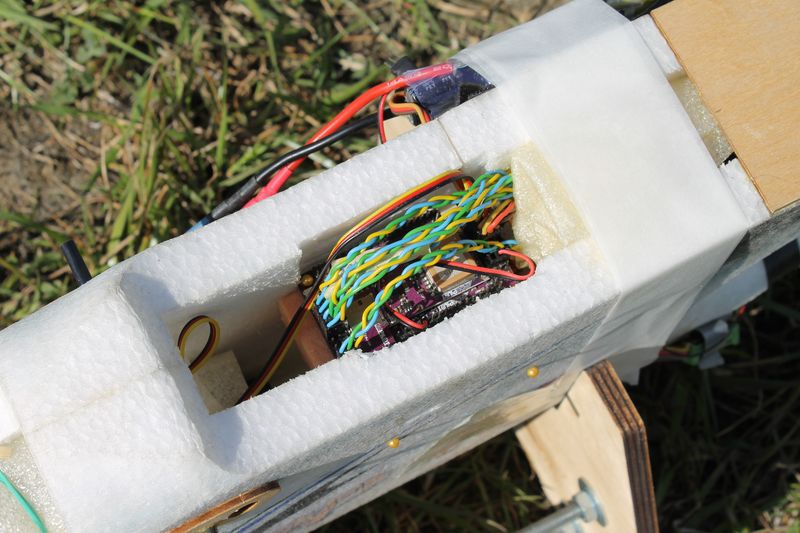
- 安定した飛行のための飛行「頭脳」Ardupilot 2.0を搭載したボード。 ボードとの通信(ビジュアル、ビデオ、RU)が失われた場合、自動的にベースに戻る機能。
- 最後の実験の厄介な
DNAバグを修正しました。 焼き付けられた両方のWi-Fiモジュールは、28dBmのフルパワーで動作しました。
マテリエル
地球上のアンテナ経済。 実験に応じて、「クローバー」またはセクターアンテナがモジュールのWi-FiのRFコネクタに接続されました。

「ピン」のあるボード

「クローバー」とボード
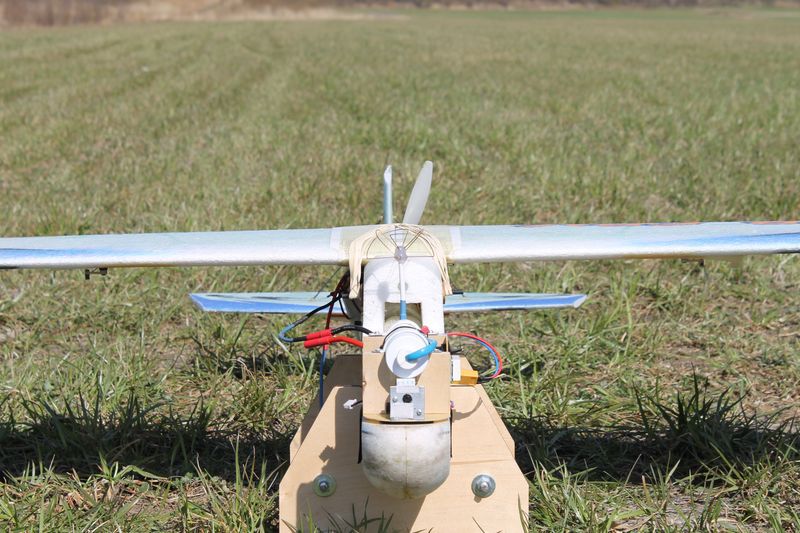
Ardupilot 2.0
たくさんのビデオ
地上部のホイップアンテナで飛行をテストします。
「クローバー」でのテスト飛行
結果は驚くほどかなり良かった。 客観的には、「クローバー」の方がうまく機能したため、それ以降のすべてのテストは「クローバー」で実行されました。
レンジフライトテストは、HD 1280x720および800x600の2つの解像度で実施されました。
1280x720
800x600
この許可のために、scらないでください...彼らはHDが約束されていると言いますが、ここではそうではありません。 実験目的のみ。 将来的には、320x200までのテストが予定されています
信頼できる受信の半径は700メートルを超えました!

フルHDをテストすることにしました
1920x1080
結果は少し予測可能であり、遠くはありません...しかしそれは動作します!
範囲と
モニターへの
着陸のためのより多くのテスト。 ここであなたは一言言わなければなりません...パイロットは地上のコンピューターのモニターをのぞき込む
思考の
力によって実際に泡の飛行機を植えました。
800x600
結論と当面の計画
前の実験と比較して、結果は大幅に改善されました。 システムは機能し、さらに掘る
ために飛ぶ場所があります。 質問は離陸するか離陸しないかはもはや価値がありません。 間違いなくHD FPVが飛び立ちました!
- ボード上のアンテナの位置をより詳細に検討してください。
- 直線偏波天井アンテナを使用してオプションをテストします(すでに郵便局で待機しています)。
- 高さでシステムをテストするには、フォームの再加工が必要になります。 彼はそれほど強くなく、非常に
悲しいことにゆっくりと高所に登ります。 - 5.8 GHzモジュールを試してください。kunkshabrayuzerから興味深い提案があります。
- 仕事の別のフロントは、OSDの実装の機会を開きます-放送映像へのフライト情報の賦課。 パイロット
は、ボードをターゲットに向けて 、オンボードバッテリーの高さと電圧を取得する必要があります。 - GPSフライトトラックを構築し、それらをビデオと組み合わせて、より深い実験と有効範囲の分析を行うのは興味深いことです。
既に利用可能なUSB GPSがあり、ラズベリーに接続されているため、NMEAは停止できないため停止します。 I2Cバスを介して
MPU-9150ジャイロスコープをラズベリーに接続するソリューションがあります。もちろん、Ardupilotから必要なデータを受信できます...ここで質問はまだ開いています。
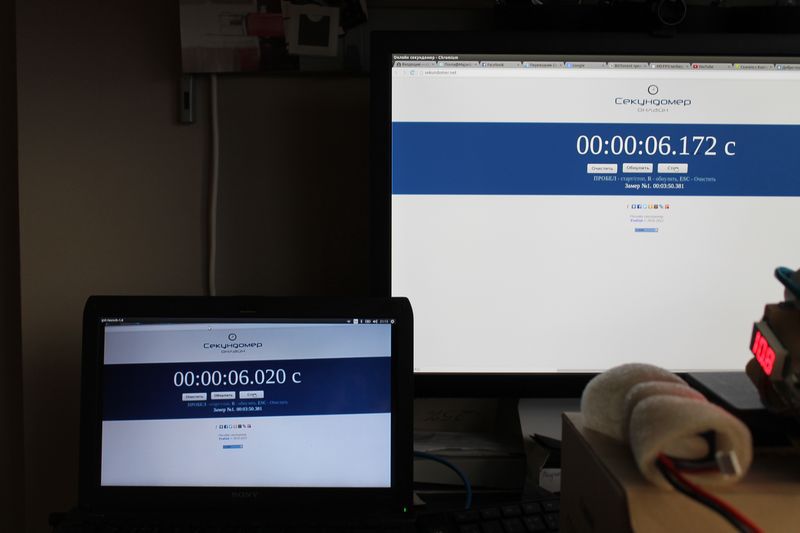
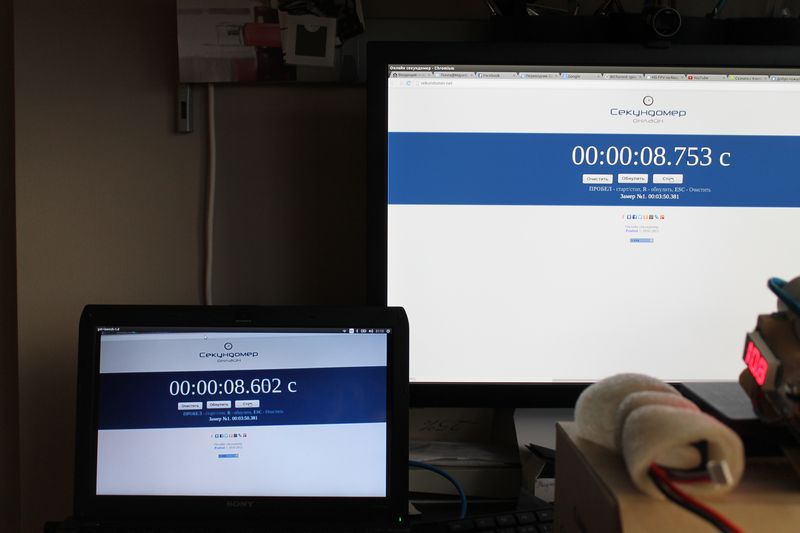
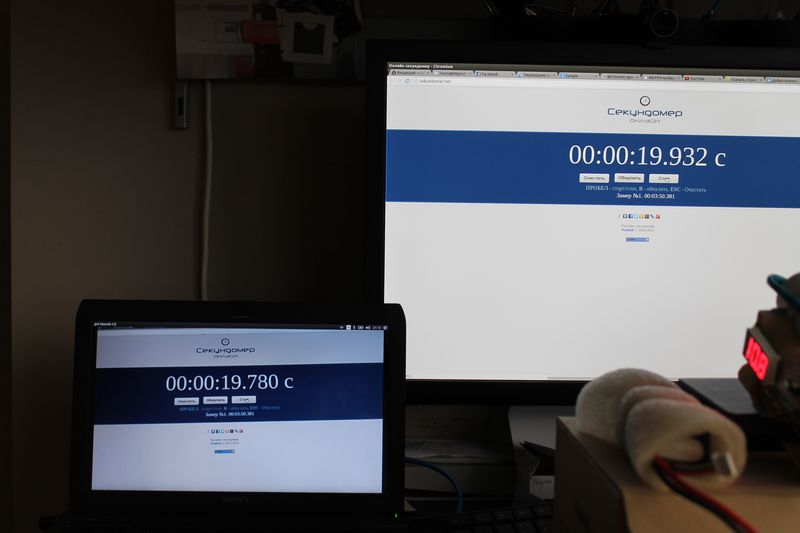
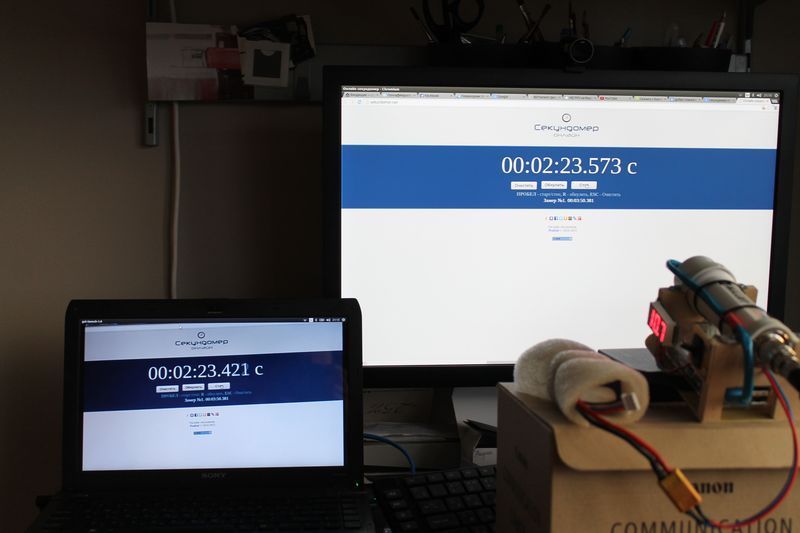
PS約束された遅延計測
フライトカメラは、ストップウォッチが表示されている大きなモニターを見ます。小さなモニターでは、wifiで受信した信号で
地平線が散らばっています。
写真

そして少しのビデオ
遅延〜150ms