こんにちは、読者のみなさん、ミニ飛行船のタッチコントロールシステムの開発プロジェクトに注目してください。
制御タスクは、飛行船をラインに沿って移動させることです。 シンプルなリモートコントロールシステムも実装されました。
制御オブジェクトは、TTI SFUのE&M部門で開発されたミニ飛行船です。
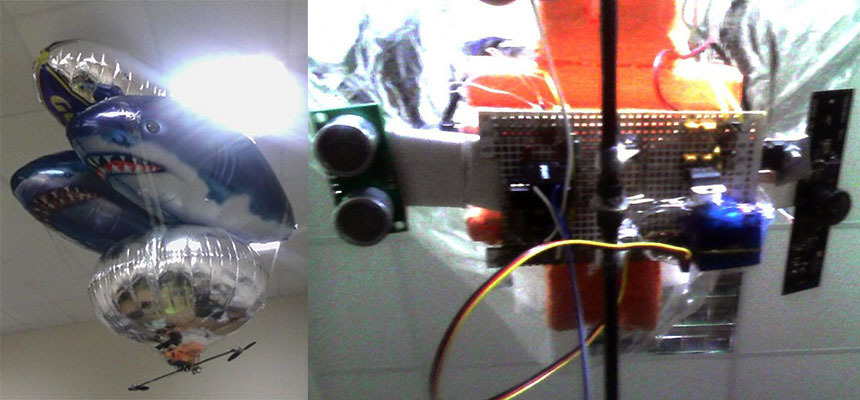
図1-ミニ飛行船の全体図。
このプロジェクトの目的は、ライン(モーションパス)を検出するための技術的なビジョンシステムを開発することです。 飛行船に対するラインの位置とラインの傾斜角の要因を考慮したコースコントローラーの開発。 高さ調整装置の開発; リモート制御システムの開発。
1.タスクの分析と問題の記述
感覚制御システムの開発は、自動車工学科で設計されたミニ飛行船に基づいています。
ミニ飛行船には、一般的に利用可能なコンポーネント、つまりさまざまなフォイルボールにシェルが含まれています。
ミニ飛行船のハードウェアは
- -ラズベリーパイシングルボードコンピューター;
- -広角WebカメラGenius WideCam 1050;
- -超音波高さセンサーhc-sr05;
- -2つの電気モーター;
- -サーボ駆動エンジンの推力偏差;
- -電源サブシステム。
ミニ飛行船の垂直軸周りの回転は、マルチプルエンジンによって実行されます。 飛行船の高さは、垂直軸に沿ってエンジンの推力ベクトルを偏向することにより調整されます。
飛行船エンジンには、最大回転速度3200 rpmを設定する機能があります。 /分 モーターの動作電圧は7.4ボルトです。 エンジンは飛行船の中心から25 cm離れており、飛行船の最下点にあります。
2.ビジョンシステム
2.1。 テクニカルビジョンシステムのブロック図

図2-ミニ飛行船の技術ビジョンシステムの構造図。
ビジョンシステムは、ハードウェアとソフトウェアで構成されています。 ハードウェア部分は、既に接続されているMJPG信号が送信される有線接続によってソフトウェア部分に接続されます。
ハードウェアにはウェブカメラが含まれます。
ソフトウェア部分には以下が含まれます。
- -MJPG形式のビデオ画像を受信し、カメラ設定を設定するためのカメラドライバー。
- -画像処理モジュール。
2.2。 機能設計
処理方法およびラインの位置を決定するためのアルゴリズム(次の章で説明します)によって選択されたものを考慮して、ソフトウェア実装で次のサブタスクが識別されました。
- -ビデオカメラの内部パラメーターを調整します。
- -カメラから画像を取得します。
- -画像をMJPG形式からHSVカラー形式に変換します。
- -カラーマッチングにより交差点エリアの検索を整理します。
- -交点の座標を決定するアルゴリズムを実装し、
- -役に立たない信号を除外する。
- -STZブロックと方向レギュレータブロックの統合を実装します。
カメラ画像のキャプチャとHSVカラー変換は、opencvライブラリに割り当てられます。
2.3。 アルゴリズム
ご存知のように、空間内の任意の2点を介して、線を引くことができます。 この場合、ミニ飛行船のテクニカルビジョンシステムは、敷設ラインを決定する役割を担います。 画像処理の最初のステップは、線が敷かれたこれらの2つのポイントの検索です。
これらのポイントを検索するには、画像の関心領域を定義します。 関心領域の最適な位置は、フレームの垂直部分の1/3と2/3の間です。 図4に青い線で示すように。

図3-対象ゾーンの最適な場所。
対象ゾーンの位置を最適化するための基準は、対象ゾーンの下部がミニ飛行船から垂直に下にあり、上部がフレームの境界にないことです。これにより、ゾーンの画像の歪みが最小限に抑えられます。
各ゾーンの高さは10ピクセルです。
線との交点は、ピクセルを特定の色と一致させることによって決定されます。 HSVビジョンシステムの色空間。
関心のある各ゾーンでのアルゴリズムの2段階。
1.特定の色のコンプライアンスの判定は、カメラから受信したフレームの幅を幅とする配列で発生します。 配列の各要素は、対象の列の平均10ピクセルです。 したがって、カメラからの色ノイズは平均化されます。 アレイには3行があり、各行はHSVチャネルに対応しています。 出力では、値「1」が特定の色に対応するピクセルアドレスを示し、値「0」が指定された色に対応しないピクセルアドレスを示す1次元配列を取得します。
for(x = 0 ; x<width ; x++) {offset = x * nchannels; for (y2=35; y2<46; y2++ ) { uchar* data = (uchar*)(hsv->imageData + y2*step); r=data[offset + 2]; g=data[offset + 1]; b=data[offset]; h[y2-35]=b; s[y2-35]=g; v[y2-35]=r; } h[10]=(h[0]+h[1]+h[2]+h[3]+h[4]+h[5]+h[6]+h[7]+h[8]+h[9])/10; s[10]=(s[0]+s[1]+s[2]+s[3]+s[4]+s[5]+s[6]+s[7]+s[8]+s[9])/10; v[10]=(v[0]+v[1]+v[2]+v[3]+v[4]+v[5]+v[6]+v[7]+v[8]+v[9])/10; if ((h[10]<h1&&h[10]>h2)&&(v[10]>ss)&&(s[10]>vv)) {st[x]=1;} else {st[x]=0;}
2.交差ゾーンの左右の境界の決定。
同じ次元の2つの配列が入力配列に入力されます。 それらをst1およびst2と呼びます。 配列を埋めるためのアルゴリズムは、問題の入力配列の要素が1の場合に変数が線形に増加し、問題の要素が0の場合に指数関数的に減少し、配列st1の次の要素に書き込まれるサイクルによって実装されます。 st2配列を形成するために、入力配列は最後から考慮されます。 その結果、配列st1とst2は、次のようにグラフィカルに表現できます(図5)。

図5-st1およびst2配列のグラフィック表示。
有用な信号は、色の定義の最も広い範囲です。 ノイズは小さな誤検知であり、図7の図で確認できます。赤いグラフの最大要素(st1)のx座標は、対象ゾーンを横切る線の右側です。 青いグラフの最大要素(st2)のx座標は、関心領域を横切る線の左側です。
リスティング
double sum=1; double sum2=1; for (x=0; x<width; x++ ) { if (st[x]==1) {sum=sum+1;st1[x]=sum;} else {sum=sum/1.05;st1[x]=sum;} if (st[width-x]==1) {sum2=sum2+1;st2[width-x]=sum2;} else {sum2=sum2/1.005;st2[width-x]=sum2}}
配列st1およびst2の形成後、配列の最大要素が検出され、交差ゾーンの中心が計算されます。 説明されているすべてのアクションを2番目の交差ゾーンに適用すると、出口にはラインが通過するポイントの座標があります。
前のオブジェクトの状態に応じて、次のフレームの信頼ゾーンを決定する一般的な方法の使用は使用されませんでした。そのような方法は、出力パラメータで許容できるノイズ結果を示したためです。 また、この方法を適用してもプロセッサの負荷は軽減されません。幅176ピクセルの2つの配列の複数のソートのみを処理するため、結果の画像全体の解像度は176x144ピクセルです。
3.方向ノブ
3.1。 制御システムの一部にあるレギュレーターのブロック図
図4-方向コントローラーのブロック図。
ソフトウェアの実装は以下で構成されます。
- -ファジーレギュレーター。
- -線の回転を計算するための数学モジュール。
- -ソフトウェアPWM。
Raspberry piのハードウェアは、PWMソフトウェアの結果に基づいてgpioピンを接続するbcm2835プロセッサで構成されています。
ハードウェアの実装は以下で構成されます:
- -L293DNEエンジンドライバー。
- -左右の電動モーター。
方向コントローラーのブロック図は、ファジーコントローラーに基づくソフトウェアパーツで構成されています。 難読化アルゴリズムはMamdaniアルゴリズムです。
ソフトウェアPWMの使用は、使用されているRaspberry piシングルボードコンピューターにハードウェアPWMがないためです。
モータードライバーは、PWM信号を増幅するために使用されます。
3.2。 ファジーコントローラーを設計します。
3.2.1。 作成されたシステムの入力および出力の定義。
ミニ飛行船がラインに沿って正確に通過するには、飛行船の軸からのラインの偏差と同じ軸を中心とした回転の両方をそれぞれ考慮する必要があるため、コントローラーの入力パラメーターで可変偏差(OFF)と回転(POV)を設定します。 コントローラーの出力変数は、出力PWM信号のパラメーター(%)です。 左側のエンジンに対するエフェクトの出力変数は、それぞれ(LEFT)、右側のエンジン(RIGHT)として指定されます
3.3.2。 入力変数と出力変数のそれぞれに対する用語を含むメンバーシップ関数の割り当て
PWM効果に対するDCモーターの非線形パラメーターによって計算される、左右のモーターのメンバーシップの出力条件を設定する必要があります。 しかし、飛行船の飛行速度はエンジンのわずかな線形偏差を意味するため、この用語は絶対線形特性を持つ理想的なエンジンとして設定されました。
図5-出力変数LIONおよびRIGHTの用語。
ラインからの飛行船の縦軸の偏差と同じ軸からのラインの回転の入力変数は、テクニカルビジョンシステムと角度を計算するための数学モジュールの作業の結果として取得され、そのカメラには歪みインジケーターがあります。 カメラの歪み指標は、入力条件OFFおよびPOVで設定できます。 位置決めの精度とラインに入る軌跡には要件がないため、歪みインジケータは無視できます。 このタスクでは、用語はカメラの歪みの画像を調整し、それらの用語を調整しませんでした。 用語はおおよそ変更されました。これは、システムが機能するための十分な条件でした。
図6-用語オフとPOV。
3.2.3。 実装されたファジィシステムの結論のためのルールのベースの開発
ルールベースを開発するには、言語変数(用語)をわかりやすい名前として指定する必要があります。
図7-用語の指定。
OFF 1-強く左。
OFF 2-左へ。
オフ3-中央。
オフ4-右側。
OFF 5-強く右側。 | POV 1-左側。
POV 2-左側。
POV 3-中央。
POV 4-右側。
POV 5-右側。 | LEO 1-非常に弱い。
LEO 2-弱い。
LEO 3-ミディアム。
LEO 4-強く
LEO 5-非常に。 | 法律1-非常に弱い。
法律2-弱い。
法律3-中。
右4-強く
右5-非常に強い |
したがって、これらの名前は、ミニ飛行船がエンジンの異なるプルによって制御されることを考えると、接続用語を確立します。
ルールブロック:
オフが強く残っている場合、ライオンは非常に弱く、権利は非常に強い。
左にオフの場合、ライオンは弱いです。 そして、右
センターがオフの場合、LEOは平均です。 そして権利の平均。
右側がオフの場合、左が強く、権利が弱い。 | オフが強く右にある場合、ライオンは非常に強いです。 そして、権利は非常に弱いです。
POVが非常に残っている場合、LIONは非常に弱いです。 そして、右は非常に強いです。
POVが左側にある場合、LIONは弱いです。 そして、右
POVが右側の場合、ライオンは強く、権利は弱いです。
POVが強く右側にある場合、LIONは非常に強いです。 そして権利は非常に弱い |
入力変数POWについては、平均値の連結性がないことに気付くかもしれません。 これは、ラインに対する飛行船の縦軸の正しい向きとそれからの偏差により、平均項がモーターの入力値を中央に引っ張ったためです。これは飛行船のこの位置では正しくありません。
このファジーシステムでは、位相緩和アルゴリズムはMamdaniアルゴリズムです。
このアルゴリズムは、いくつかの連続したステージを記述し、後続の各ステージは前のステップで取得した入力値を受け取ります。
3.2.4。 ファジィシステムのプロセスの分析
ワークプロセスを分析します。 規制当局の相関ポートレートが作成されました。 以下の図では、y軸は入力変数POW、x軸は入力変数OFFです。 ピクセルの色は各エンジンの入力変数に対応し、白は最小、黒は最大です。
図8-左右のエンジンのファジィシステムの週末値の相関ポートレート、相関ポートレートの交差点。
最後の図では、同じ色と位置のピクセル強調表示を使用した2つの相関ポートレートの交差の結果が表示されています。 交差点の結果から、同一のエンジン出力値がどのような入力条件であるかを判断できます。 エッジの特徴的な黒い四角の領域は、先端が切り取られたエッジ項を与えます。
以下は、赤で示されたフレーム内の線の位置を基準にしてファジーコントローラーをエミュレートした結果です。 ビデオの右側では、左右のエンジンのPWM信号レベルをそれぞれ確認できます。 左側には、アクセサリの入力用語と出力用語があります。
4.高さ調整器
4.1。 レギュレータブロック図
図9-高さ調整装置のブロック図。
ソフトウェアの実装は以下で構成されます。
- ファジーロジック上のPIコントローラー。
- 距離を計算するための数学モジュール。
- ソフトウェアPWM;
Raspberry piのハードウェアはbcm2835プロセッサで構成され、PWMソフトウェアの結果に基づいてgpio出力を接続します。
ハードウェアの実装は
- サーボ、エンジンの推力ベクトルの変更。
- 超音波センサーHC-SR05。
4.2。 ファジーコントローラーの設計
4.2.1。 作成されたシステムの入力と出力の定義
レギュレーターのファジー部分の入力パラメーターは、希望の高さからの誤差です。 出力変数は、ハイブリッドコントローラーのpiコンポーネントの比例部分です。
不可欠なコンポーネントは、システム全体の出力であり、単純にストレージ変数として実装され、サーボドライブの位置を決定します。
4.2.2。 入力変数と出力変数のそれぞれに対する用語を含むメンバーシップ関数の割り当て
表面上の用語の均等な分布に基づいて、出力アクセサリの用語を設定します。 ファジーシステムの出力の非線形性は、入力変数の項によって与えられます。
図10-出力変数EXITの用語
高さからの変数誤差の入力項を次の図に示します。
図11-入力変数HEIGHTの用語
4.2.3。 実装されたファジィシステムの結論のためのルールのベースの開発
ルールベースを開発するには、言語変数(用語)をわかりやすい名前として指定する必要があります。
図12-用語の指定
高さ1-強い逸脱。
高さ2-下向きの偏差。
高さ3-偏差なし。
高さ4-偏差が最大。
高さ5の強い偏差トップ | 出力1-高正
出力2-正
出力3-ゼロ
出力4-負
出力5-高いマイナス |
私たちは責任を持って用語への直接的なつながりを確立します。
ルールブロック:
IF高さ:強い下向きのたわみ、それから降伏:高正
IF高さ:下向きの偏差、それから利回り:正
IF高さ:偏差なし、THEN出力:ゼロ
IF高さ:上に傾けて、次に出力:負
IF高さ:強いたわみトップ、THEN出力:高い負
5.リモート制御システム
リモートコントロールシステムは、エンジンのトラクションモーメントの差を制御するために実装されています。 ボタンを押すとトラクションモーメントのスムーズな逸脱とスムーズな復帰が実現されるため、エンジンの推力の差を一定の範囲内に維持できるため、実装の原則はコンピューターゲームから借用されています。
キーストローク信号の送信は、sshプロトコルを使用してwi-fiワイヤレスチャネルを介して実行されます。このプロトコルでは、地上基地局(PC)からキーストロークがリモートコンピューターに送信されます。
sshプロトコルではリモートマシンの画面を見ることができるため、ビデオストリームも同じ方法で転送されます。
6.システムの実験的研究
設計されたシステムは、実験室で調査されました。 ビジョンシステムはラインの位置を認識し、交点の座標を方向コントローラーブロックに転送します。
ビジョンシステムの操作
ミニ飛行船スパン
方向と高さを調整するシステムの安定性は、係数を取ることで達成されることがわかりました。 ファジーシステムの出力の増加に比例します。
図13-推力ベクトルと飛行船の高さセンサーの位置。 プリセット高さ80 cm。
得られたデータでは、センサーからの信号のノイズレベルが高いことがわかります。システムの開発における間違いは、信号フィルターを使用しないことでした。 信号フィルターを使用しない理由は、センサーテストであり、センサー信号のノイズはそれほど多くありませんでした。 テストは無負荷のシステムで実行されたため、おそらくセンサーからの信号を正確に生成および追跡することが可能になりました。 実際に機能するシステムでは、飛行船のコンピューティングシステムが完全にロードされ、センサーの読み取り値が不正確になりました。 推力ベクトルの方向ベクトル図のノイズは無視できます。これは、サーボドライブが特定の角度で瞬時に回転する時間がないためです。 サーボは、2つの方向指示器間の平均値のみをオンにすることができました。 平均値はチャートで簡単に見ることができます。
高さ制御システム自体に関しては、推力ベクトル値のインストールに先んじていることは明らかです。 2番目の入力変数「エラー率」を修正できます。これにより、事前に制御を予測および構築するか、テスト済みのPIDコントローラーを使用することができます。
テスト中に、実装されたすべてのコントロールユニットがチェックされました。 ビジョンシステムの動作は、昼光条件で完全に静かでエラーのないライン認識を実現しました。 また、左モーター値の設定でいくつかの誤動作が検出されたため、ファジー方向制御システムを適切に設定できませんでしたが、そのような条件下でも直線スパンが実行されました。 制御の欠陥が特定され、ラインの近い場所でのレギュレーターの急性反応によって特徴付けられました。
テストの進行状況はビデオに記録され、システムステータスログも保持されたため、上で定式化された結論を導き出すことができました。