かなり前に、彼らが
キックスターターキャンペーンを正常に完了した段階で、
Mutiploプロジェクトに気付きました-それは2012年10月でした。 プロジェクトは成功しました-宣言された量のほぼ10倍の過剰です! 主張された15,000ドルのうち、132,022ドルと700人以上の預金者が集められました。
このプロジェクトの目的は、建設的で電子的なコンポーネントをこのような方法で提供することです。これにより、初心者でも、はんだ付けや複雑なコーディングなしでロボットとプログラムを組み立てることができます。
建設的な解決策は独創的でした-彼らは独自の固定機構を思いつきました、そして大きなプラスは、プロジェクトが完全にオープンソースでオープンなハードウェアプロジェクトであったことです-つまり、構造要素のすべての図面を公開して、誰でもカットできるようにする必要がありましたレーザーCNCまたは3Dプリンターで印刷します。 また、使用されるすべての電子機器の回路は、オープンアクセスで配置されます。
その遠い2012年、私はロボット工学にのみ興味があり、このプロジェクトがどうなるのかと思っていました。 翌年、エカテリンブルク-MakeItLabでハックスペースを編成しました。もちろん、Mutiploセットはライブで見たいものの1つで、最近いくつかのセットを注文しました。
これは、セットを受け取った後のセットです。

すぐにハンドル付きのスーツケースの形の便利なパッケージングに注意を払ってください。対象グループの年齢は14歳以上です。
プロジェクトのロゴは横に示されています:

スーツケースを開きます。

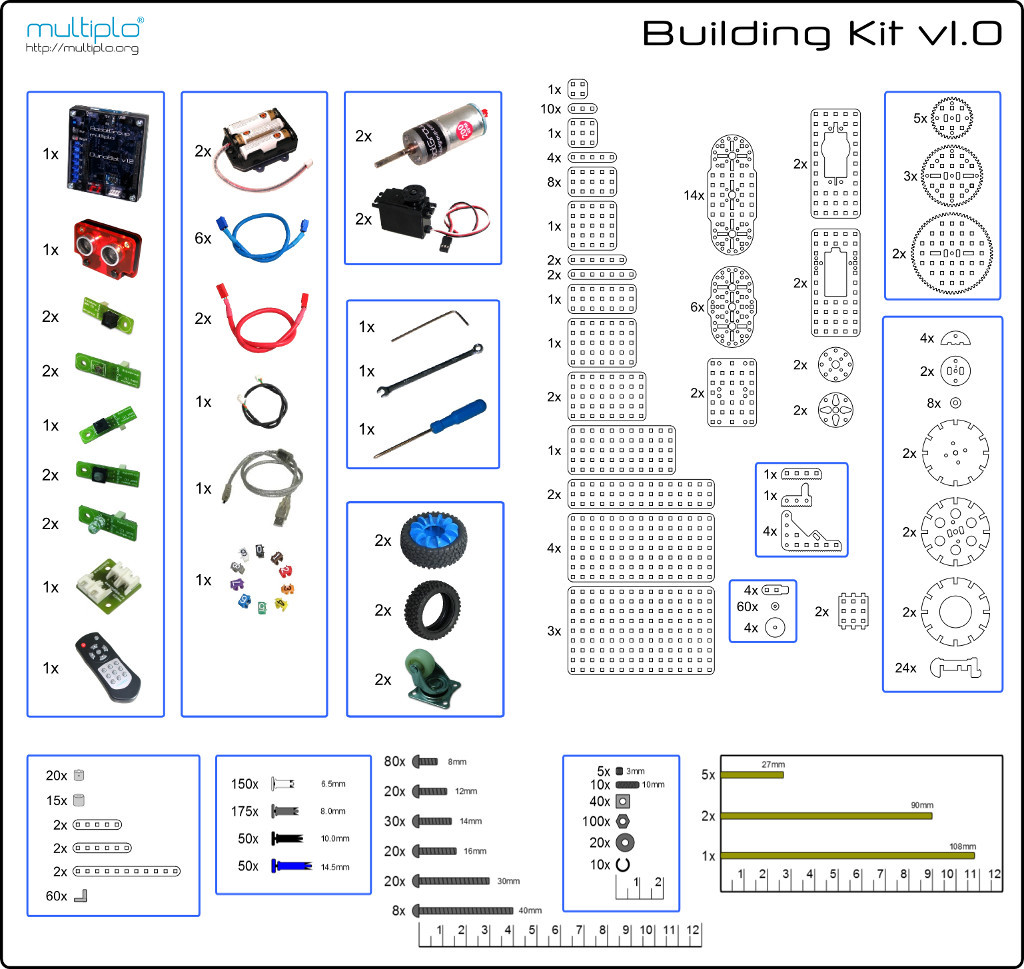
これは中身の図です:
ロボットの構成
平均的な統計ロボットには、次の要素が含まれます。
- 「Brain」はマイクロコントローラーまたはマイクロコンピューターです
- センサーは信号を受信するものです
- アクチュエータ/モーター-これは、外界に作用するものであり、その助けを借りて移動します
- 接続要素-これで、要素は接続されます
- 栄養
- 構造要素-これはすべてが取り付けられるフレームであり、ファスナー
マルチプロ要素
非表示のテキスト超音波距離センサー IRレシーバー
IRレシーバー IRセンサー
IRセンサー 音センサー
音センサー タッチセンサー
タッチセンサー 光センサー
光センサー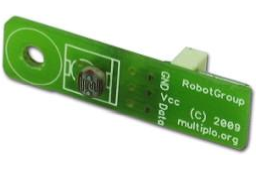 LED
LED IRリモコン
IRリモコン DCモーター
DCモーター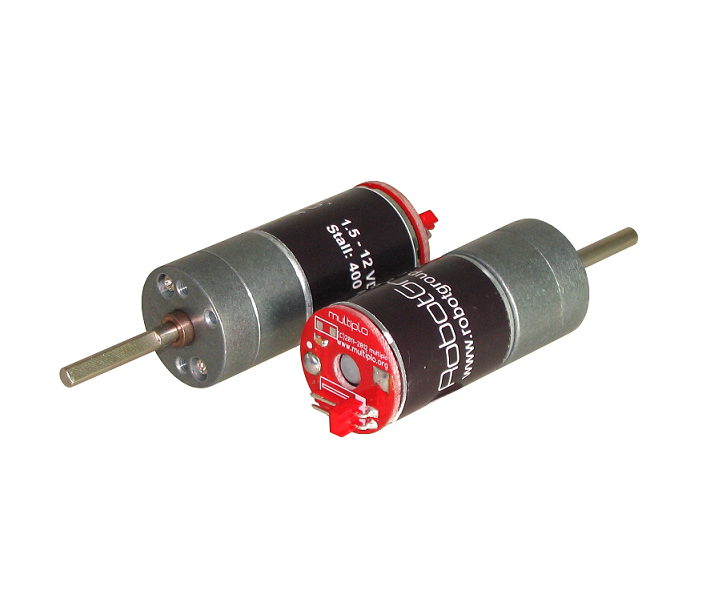 サーボモーター
サーボモーター バッテリーホルダー
バッテリーホルダー
さらにスーツケースを見てください。
誰かがこれらが掃除機の車輪だと思うかもしれません:

いいえ、モバイルプラットフォームの場合は3番目のホイールです。2つの駆動輪があり、3番目のポイントはそのようなソリューションに基づいています。
ロボットリモコン用のIRリモコンパック

作業用のツール-ドライバーとキーもあります。
機能の詳細を次に示します。

白いものは車体の要素であり、青いものは車輪用です。
以下は4つのホイールそのものです。

ゴム製のタイヤ、およびディスクの構造体は、組み立てられた形でこのようになります:

コネクタは次のとおりです。

さらに、モーターおよびセンサー用-異なる接続ワイヤ。 コネクタは、モーターとメインボードに接続されています。 右側には、Arduinoをコンピューターに接続するための(プログラムを記録するための)USBケーブルがあります。
センサーおよびサーボに接続するためのケーブル(35 cm)

モーターケーブル(30 cm)

ファスナー

ソビエトの若者から馴染みのある鉄の構築者の要素に注目します:)
プログラミング
マイクロコントローラのプログラミングは、初心者にとって最も簡単なプログラミングではありません。
Multiploは、Arduinoでいくつかのビジュアルプログラミングソリューションを提供しています:Minibloq
Minibloqは、ドラッグアンドドロップを使用してプログラムを作成できるビジュアルプログラミング環境です。コンピューターで実行を確認し
、プロジェクトWebサイトのコントローラー(Arduino)に書き込み
ます。
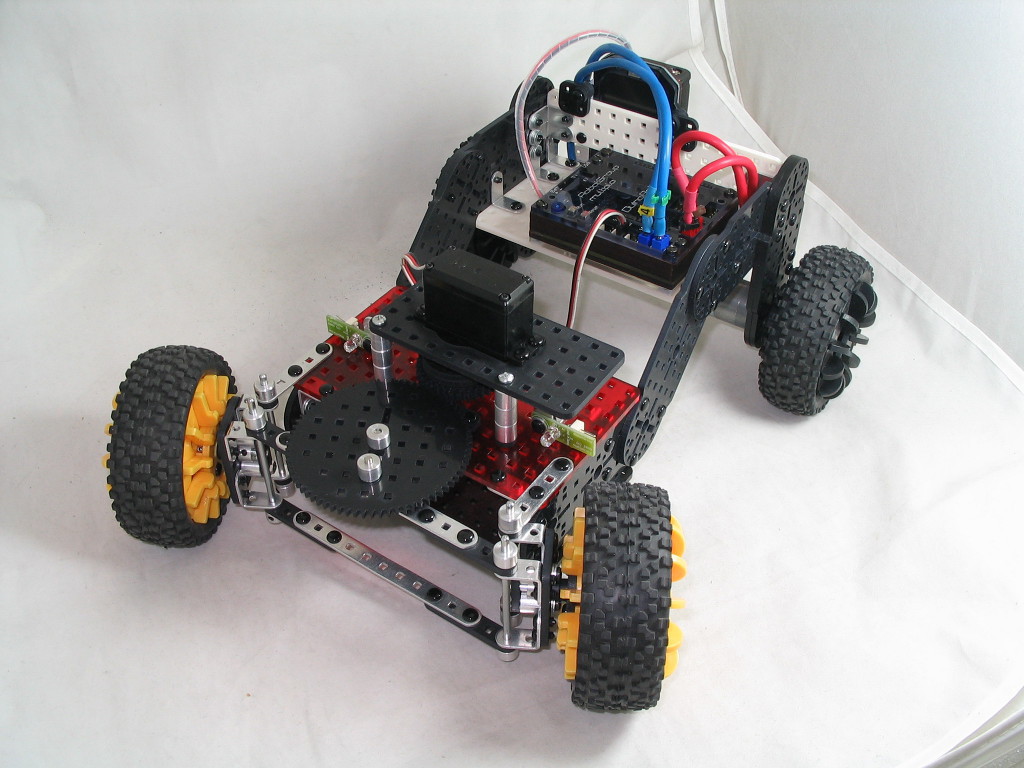
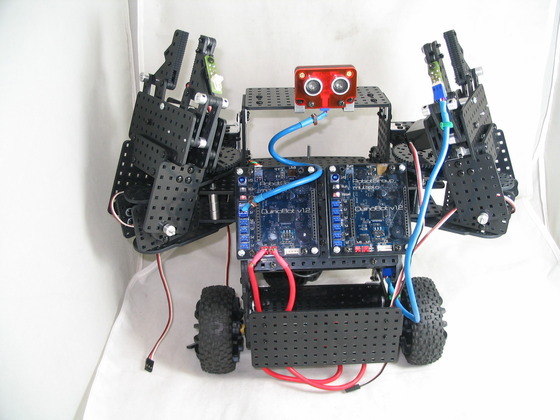
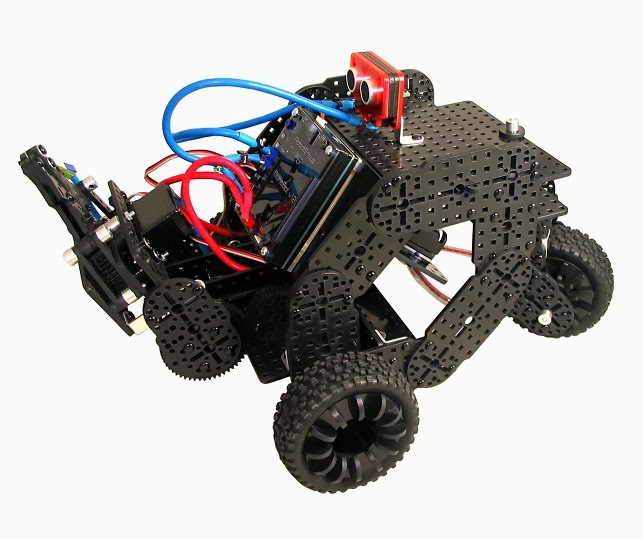
できること
Multipoコンストラクターに基づいて実行できるロボットの例を次に示します。


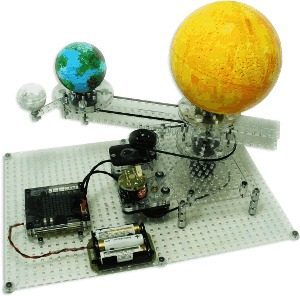
次のような教育スタンドも可能です。
 パブリックドメインに
パブリックドメインに投稿されたアセンブリ手順、チュートリアル。
設定価格
ここで提供されるキットは、2つのモバイルロボットを組み立てることができるビルディングキットv1.0です。 このオプションは269.90ドルで販売されています。 134ドルのスターターキットがあります。 Multiploキットのリストは
こちらにあります 。
自分でやる
すべての図面は
githubプロジェクトページに投稿され
ます 。
したがって、必要に応じて、機会を独立して行うことができます。
更新 :別の記事:
オープンソースロボットコンストラクターMultiplo