こんにちは
残念ながら、Habréでは、生の測定値を処理するためのすばらしいライブラリであるRTKLibについて言及していません
でした 。 この点で、私はそれを使って相対的なナビゲーションでセンチメートルを取得する方法について少し書いてみました。
目標は単純です-世間の注目を集めることです。
私自身はこのライブラリを使い始めたばかりで、単なる人間の能力に驚かされました。 インターネットには実用的な例に関する多くの情報がありますが、私はそれを自分で試してみたいと思いました-そして、結果はここにあります。
したがって、一般的なプロセスは次のとおりです。

生の測定値を受信できるGLONASS / GPS受信機が2台あるとします。 擬似距離、ドップラー、位相測定など、処理の主要な材料であるため、生と呼ばれます...
RTKLibライブラリのSTRSVRユーティリティを使用して、2つのデータストリームを記録する必要があります。1つは静止するベースステーションから、もう1つは移動予定のローバーからです。 ローバーを録音する10〜15分前に、基地から事前に録音を開始することをお勧めします。
私の場合、ベースは建物の屋根の上にあり、ローバーと一緒に通りに出ました。 録音には2台のラップトップを使用しました。
1)入力の構成-両方のラップトップのシリアル。これはGNSS受信機からのストリームです。
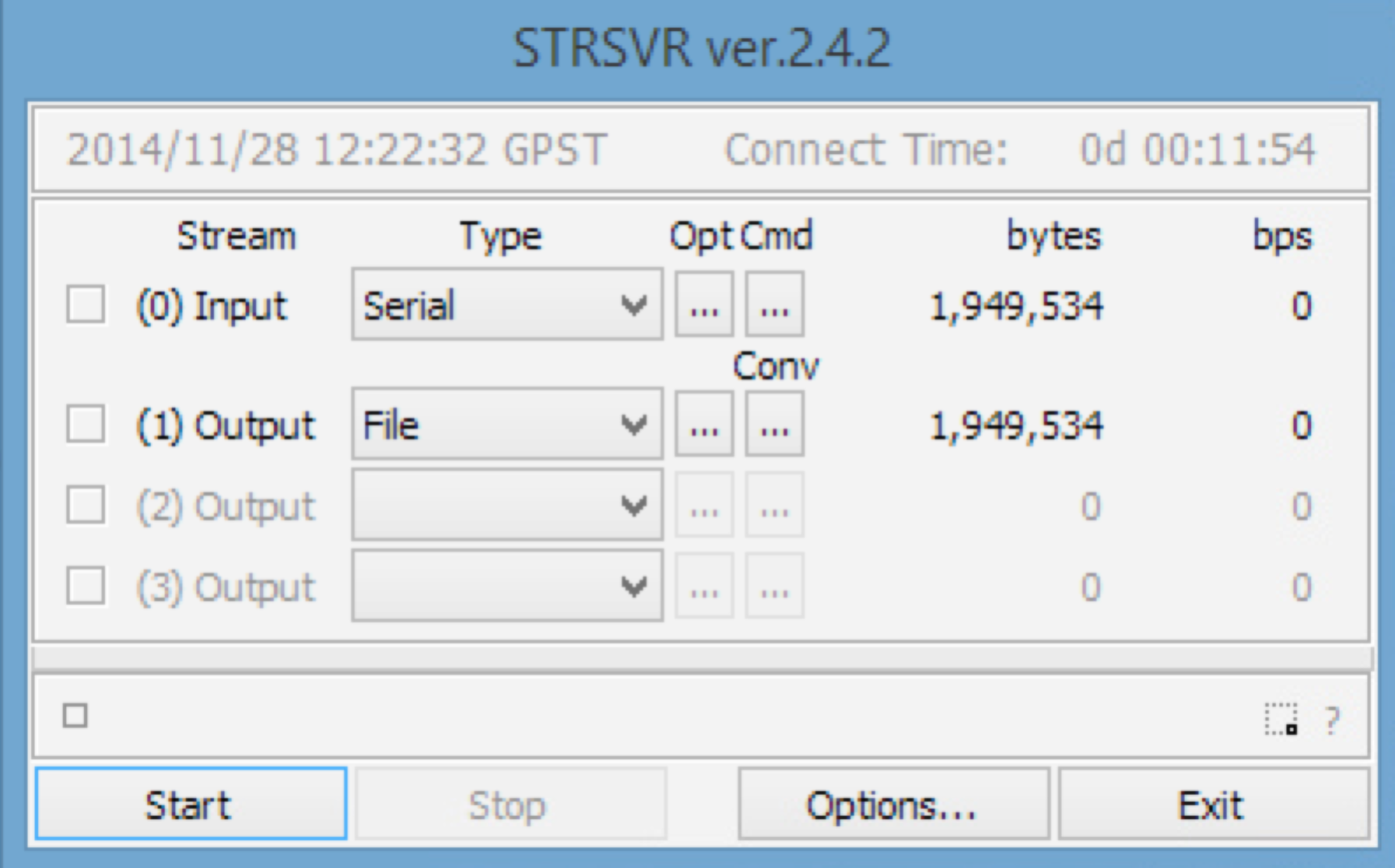
2)出力-ファイル。これは生の測定ファイルになります。
3)録音のベースを開始します-開始して、ゆっくりとオープンエリアに移動します。
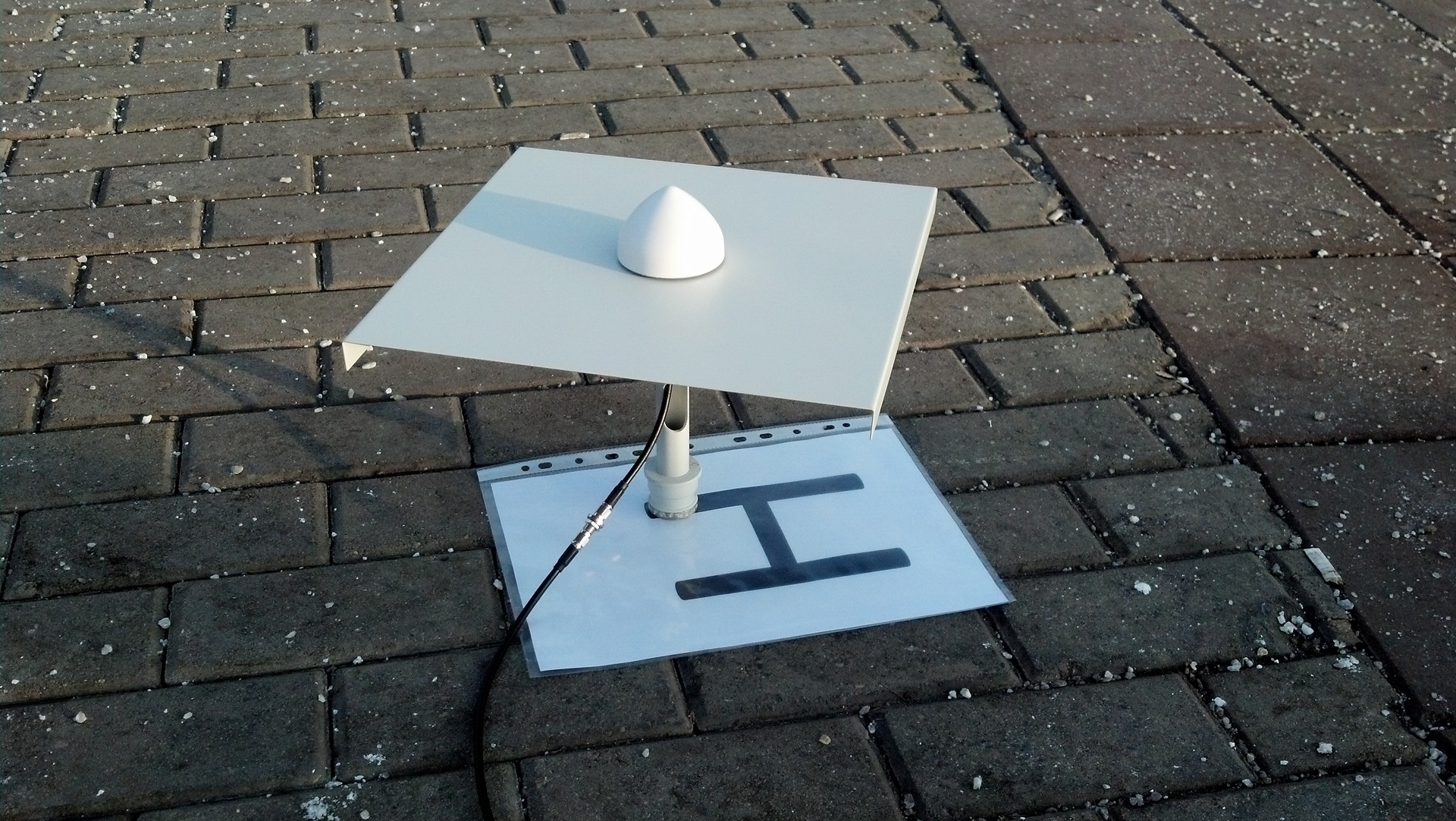
ちょっとしたデモンストレーションのために、Hの文字が付いたA4シートを印刷しました。これをアンテナ、より正確には三脚に取り付けるためのベースで回したいのです。 カナダのタリスマン社が製造する、カスタムの基礎となる表面が30x30 cmのアンテナTW3440。
4)私たちは舗装されており、ローバーを記録し、手紙をゆっくりと丸で囲みます。 ローバーには5Hzの出力周波数がありますが、すべてを注意深く行う方が良いでしょう。
5)ストロークの終わりに、オフにして何が起こったのかを見に行きます。
6)1台のコンピューターに両方のファイルをドロップし、処理に進みます。
7)最初に-生データから標準のRINEXファイルを取得する必要があります。 RTKCONVはこれを支援します。
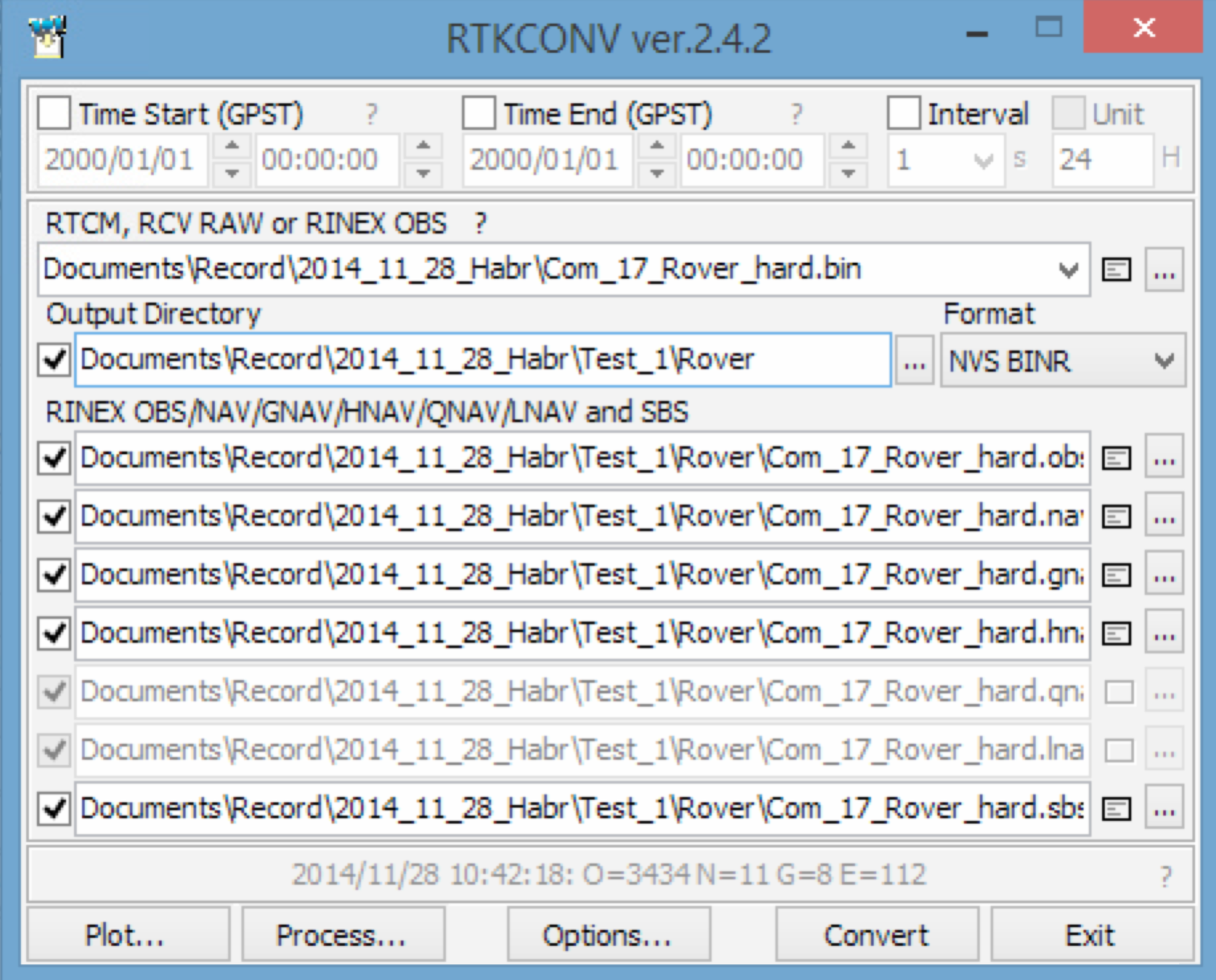
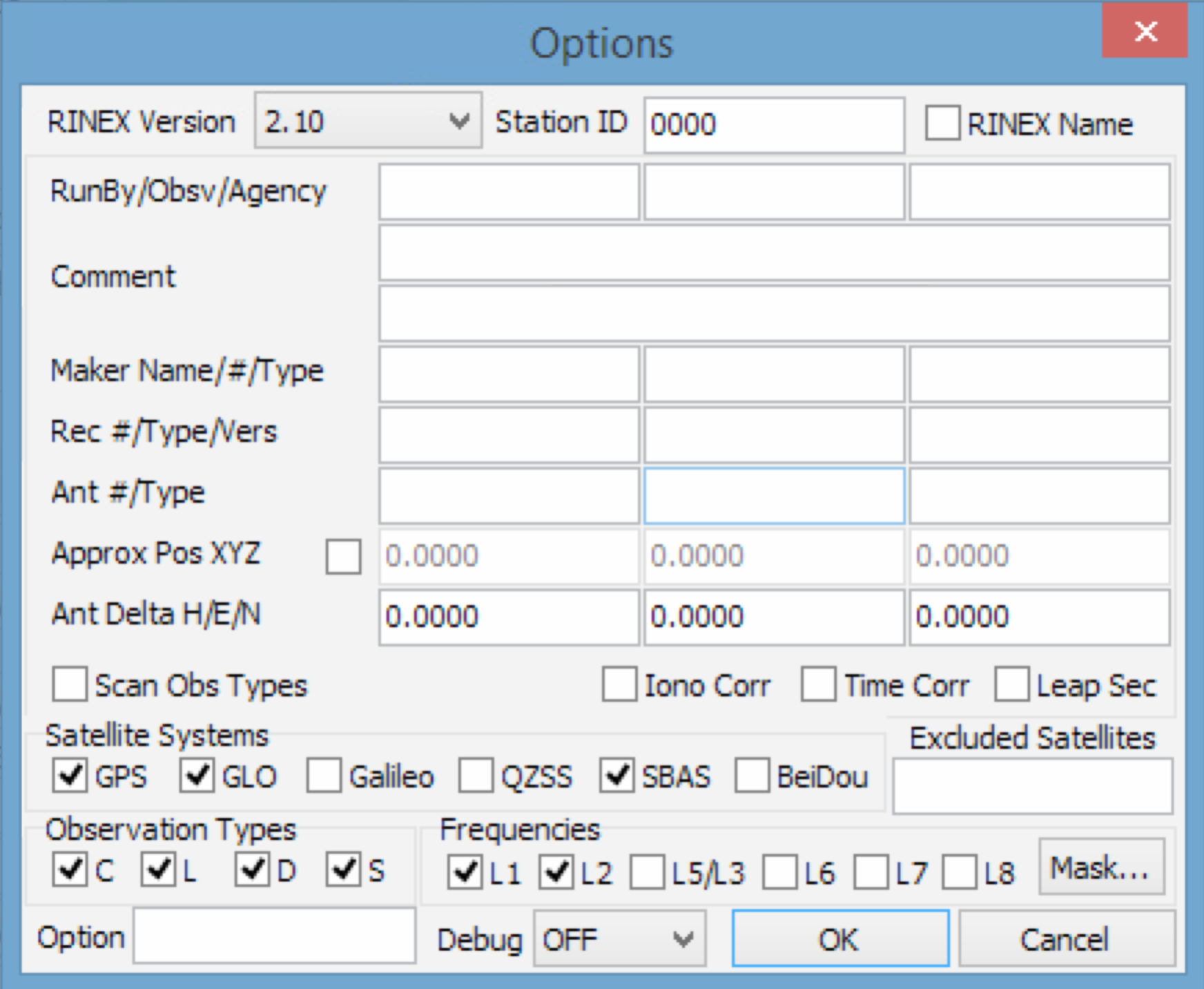
8)生データを含むファイルへのパス、およびプログラムがRINEXを配置するフォルダー(生データの形式)を示します。私の場合はNVS BINRであり、GPSとGLOをチェックする設定では、残りをチェックしないでおくことができます。
9)[変換]をクリックして、ローバーのファイルを取得し、ベースのファイルを取得します。ベースとローバーの対応するフォルダーに配置することをお勧めします。
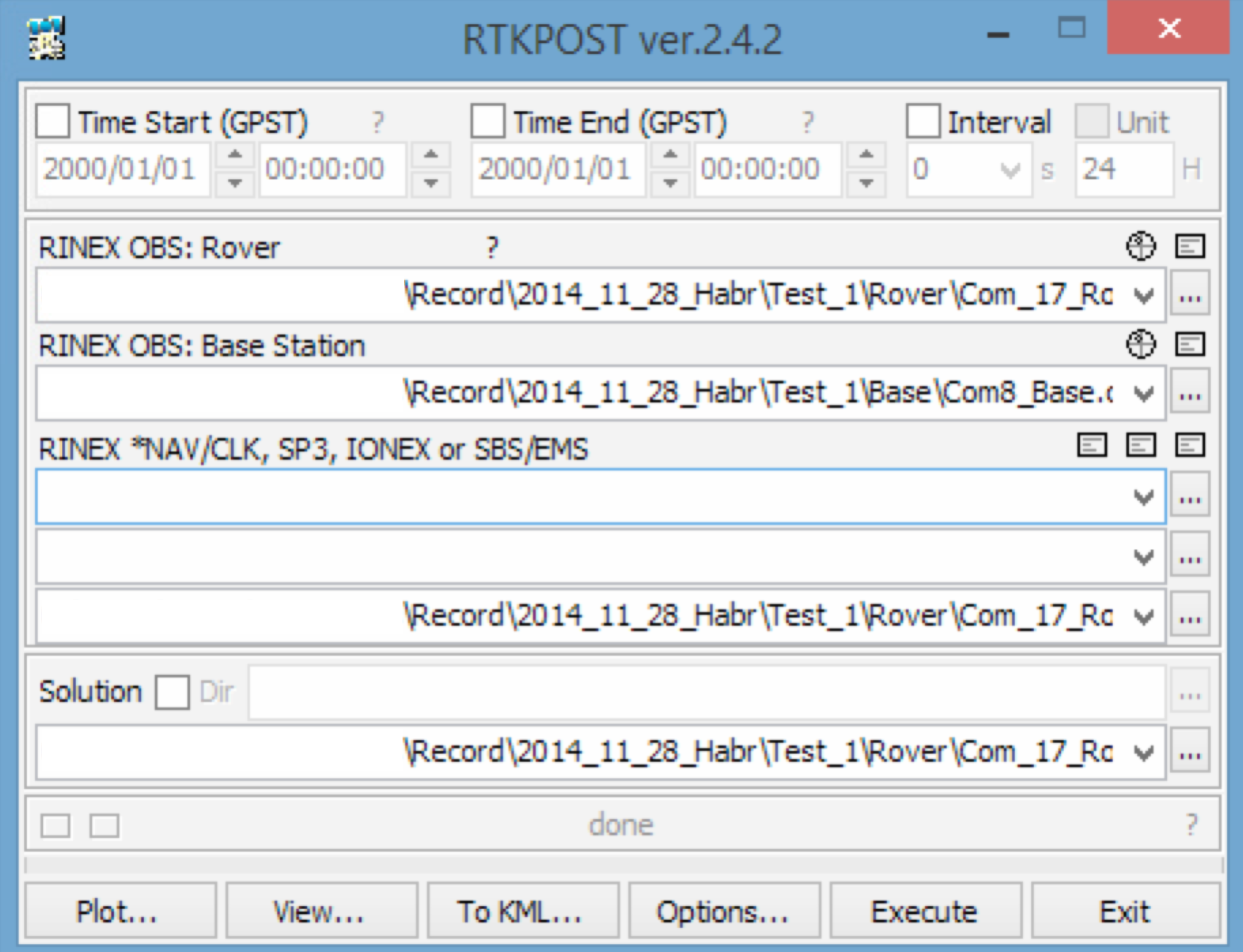
10)さらに、最も興味深いのは後処理です。 RTKPOSTユーティリティを開きます。
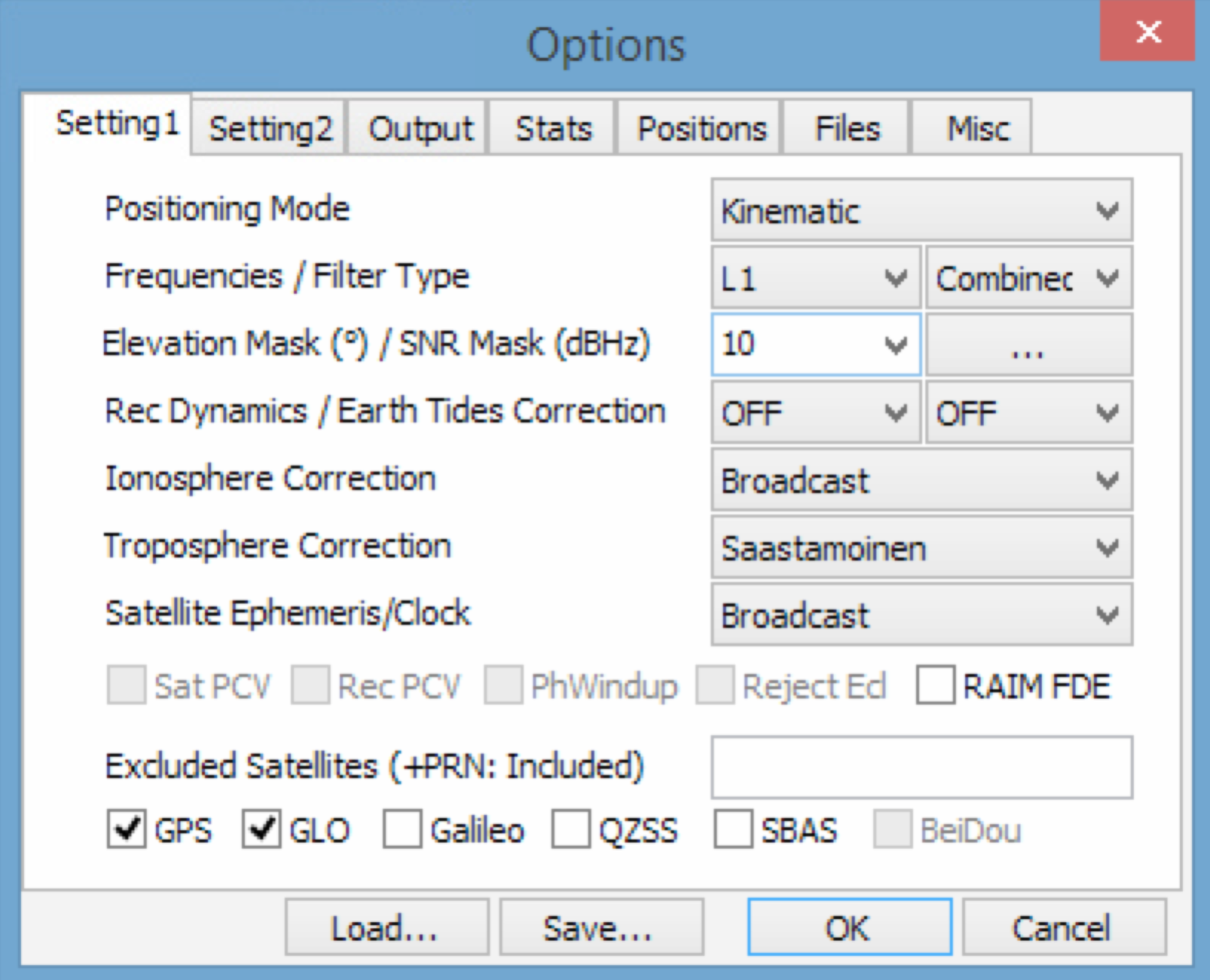
11)[オプション]、[設定]タブ1の順にクリックし、モード設定で相対測定を処理するためにキネマティックを指定します。 GPSとGLOを確認してから、設定をいじってみることができます。
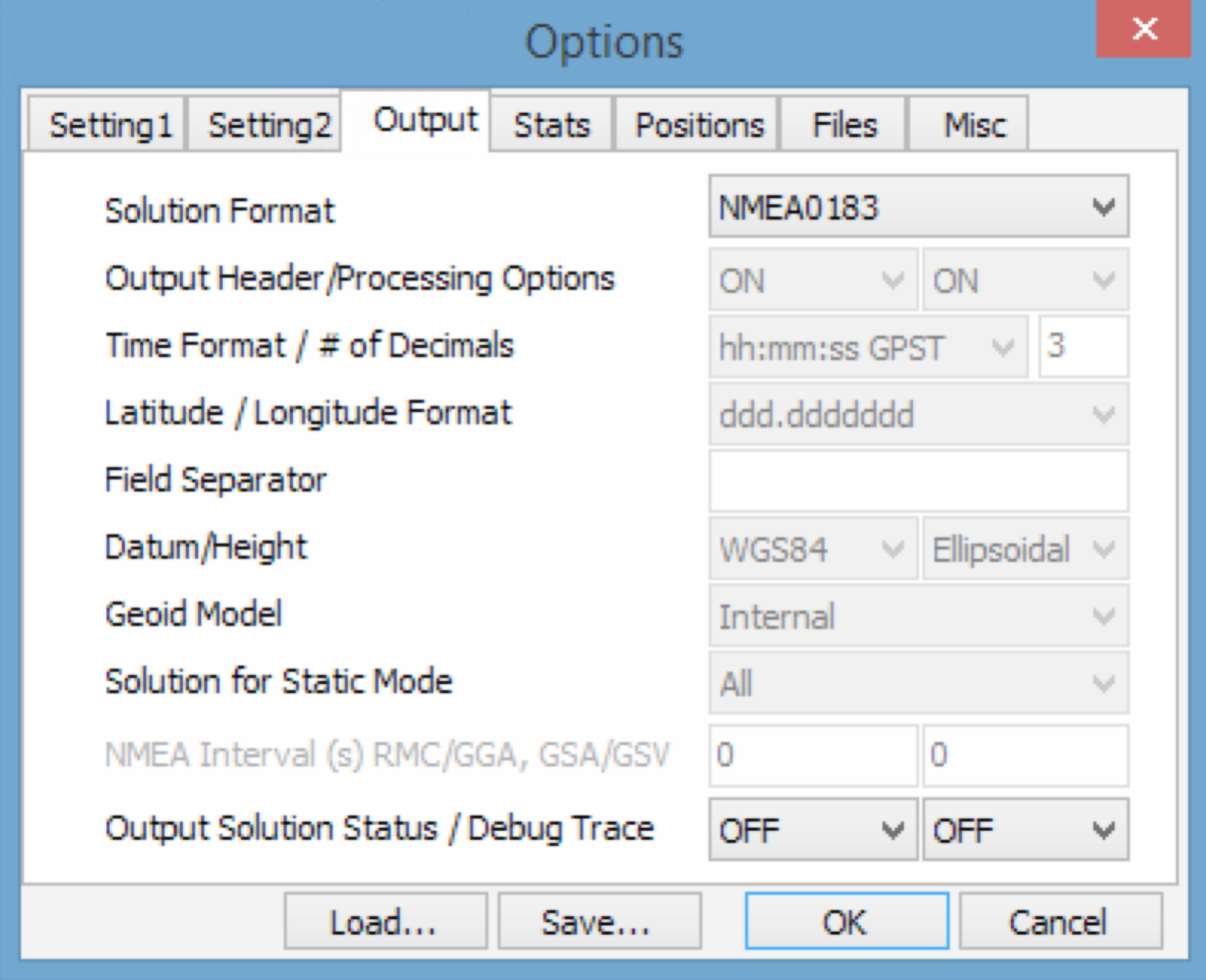
12)[出力]タブ-NMEAなどの出力データ形式を設定できます。
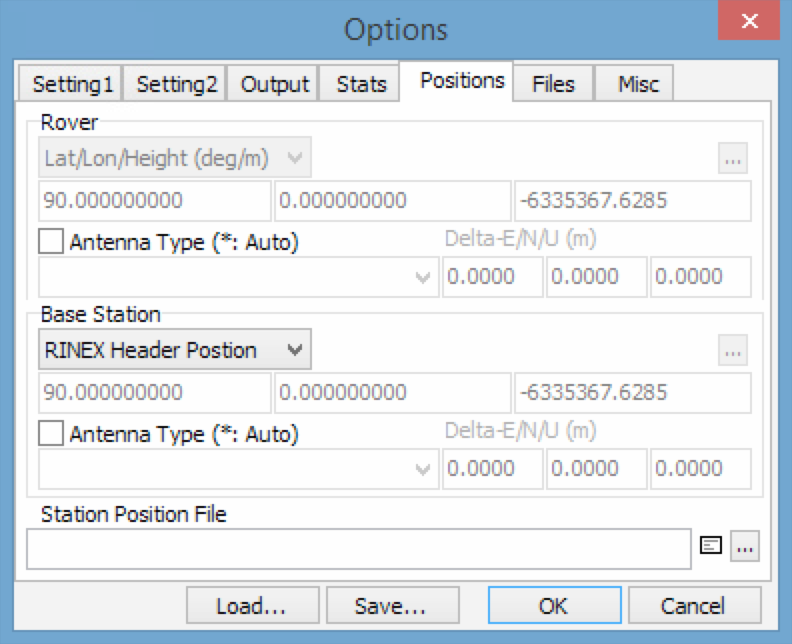
13)重要なポイントは[位置]タブです。ここでは、ベースステーションの座標を指定するか、ヘッダーから取得するか、記録期間にわたって平均する必要があります。 ベースの座標が正確にわかればわかるほど、ローバーの絶対座標はより正確になります。
たとえば、RINEXヘッダー位置を指定します-ファイルヘッダーから取得します。
14)[OK]をクリックし、メインウィンドウに移動します。そこで、[ローバー]フィールドで、ローバーのRINEXファイルへのパスを指定します。ベースには、対応するファイルへのパスを指定します。 [実行]をクリックして、結果を待ちます。 処理後、[プロット]をクリックして結果を確認できます。
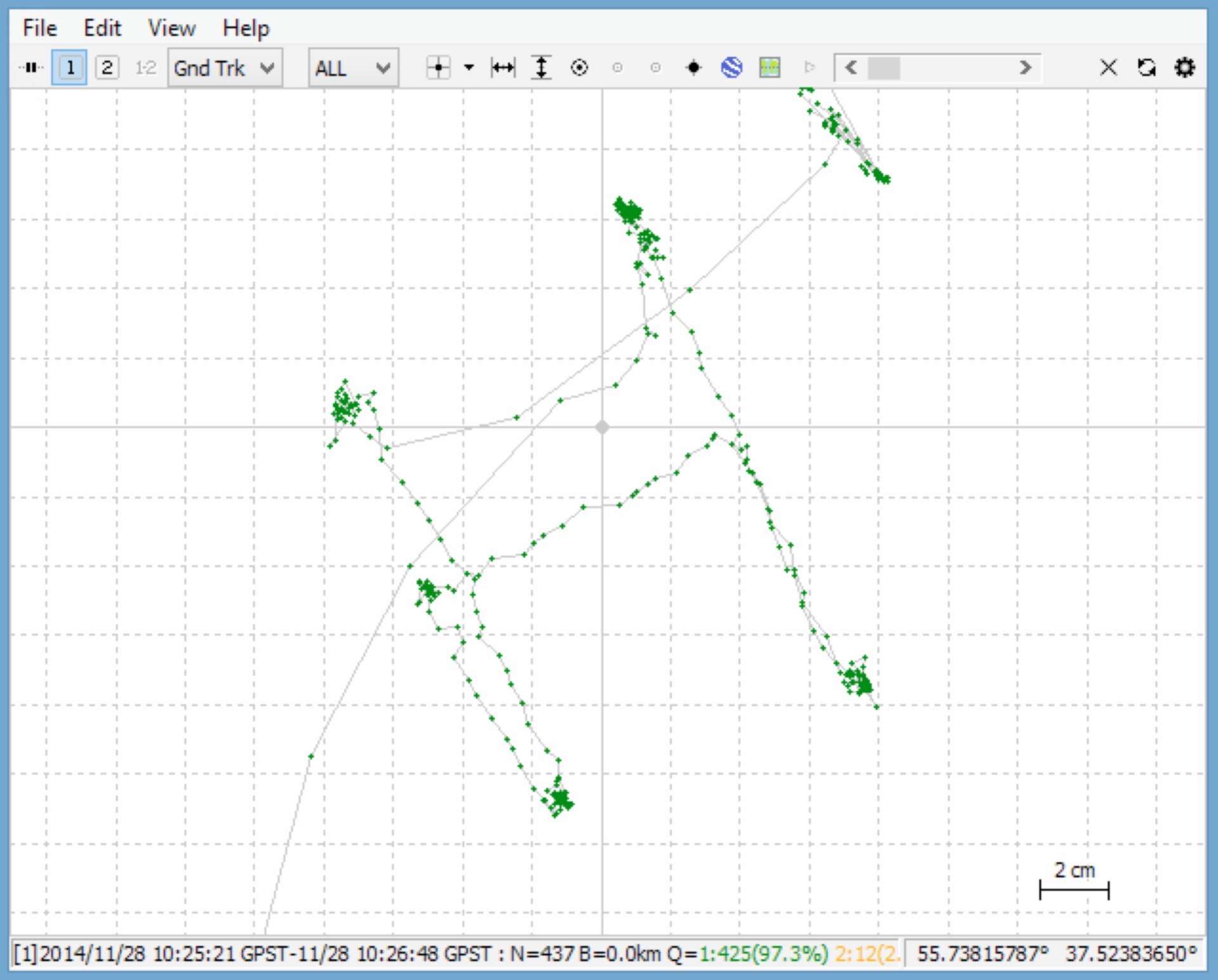
15)図の下部では、センチメートルの精度のソリューションが97.3%取得され、残りは浮動ソリューションであり、その精度ははるかに悪いことが明らかです。
今のところすべてです。
興味がある人は、RTKモードを実装する方法を書くことができます。
また、あなたの意見を知っておくといいでしょう:どの明らかなアプリケーションではセンチメートルナビゲーションソリューションを使用できますか?