過去数年にわたって、私は多くのリモート制御デバイスを作ることができました。 一部は、通常のPCまたはスマートフォンからローカルに制御されました。 インターネット経由でいくつか。 すべてのデバイスは共通の原則によって統合されています。デバイスに搭載されたビデオカメラの写真にガイドされて、人がデバイスを制御します。 そして、最終的に制御自体は、サーボモーターまたはモーターのレギュレーター(ドライバー)に制御信号を発行することになります。
そのため、この問題で経験を積んだので、さまざまなタイプのデバイス管理を多かれ少なかれ体系化しようとすることにしました。そのため、新しいデバイスを作成するときに、すべてを大量に書き直す必要はありませんでしたが、いくつかの構成パラメーターを変更するだけで十分でした。 その結果、RCboardまたはRCboardソフトウェアパッケージが誕生しました。 なぜなら メインの頭脳としてコントローラーVirt2real(
Virtualrilka )ですべての管理された事をします、そして、rcboardはもともとそれのために特別に書かれました。 したがって、束全体を「RCboardのソフトウェアとハードウェアの複合体」と哀れに呼ぶことができます。
一般に、このトピックの続きでは、従来のラジコンマシンのVirtualrykaとRCboardを使用して、インターネット経由でマシンを制御する方法に関するレシピを作成します(まあ、ローカルでも制御されます)。 通信チャネルは、通常のWi-Fi(ホームルーターを介したインターネットへのアクセス)またはYotaホイッスルを介した4G通信になります。
Crawler BSD Racing 4WD RTR 2.4Ghz 1:10

私はすぐに明確にします-「無線制御マシン」という用語は、すべての電子機器が1つのボードに実装されている安価な中国車ではなく、モジュラースキームで構築されたまともな車を意味します-エンジンスピードレギュレーター(コレクター、ブラシレス-関係ありません)および前輪を制御するためのサーボ。
繰り返しやすいので、このレシピでのみ実験ウサギのようなマシンを提供します。 rcboardの設定を少し変更し、ハンカチエンジンのスピードコントローラーを追加するだけで、同じことをどのマシンでも実行できます。主なことは、マシンにホイール(および少なくともトラック)とモーターがあることです。
組み立てに必要なもの
- エンジン制御、エンジンおよびサーボを備えた機械
- バッテリー(レギュレーターに適切な電圧を持つもの)
- カメラ、USB-OTGアダプター、マイクロSDフラッシュドライブを備えたVirt2realコントローラー(Virtualrilka)
- Wi-FiまたはYotaホイッスル(他の4Gモデムを使用できます)
- 中程度の直線性の手
しかし、最初に、いくつかのユースケースを示すために
どこで使用されましたか
すでに書いたように、私たちはすでに多くのボードを使用しましたが、文書化されたケースからは、これらのみが見つかりました。
深セン、RCバギーでバギーをテスト、モスクワからのコントロール
サンクトペテルブルクのクローラーでrtsbordyをテスト、モスクワの管理
habrahabr.ru/company/virt2real/blog/223145サンクトペテルブルク上空の飛行機でrtsbordyをテスト、モスクワから制御
habrahabr.ru/company/virt2real/blog/223183スノーボードによって駆動されるクールなスノーボード
ちなみに、除雪機自身-パーマの開発
http://omiplow.rurzbordyを実行している最も重いデバイス
先端技術のオープン研究センターとの共同プロジェクト
だから、実験ウサギ
リモートコントロール用のクローラーは、クロスが非常に高いという点で優れています。
クローラーには、4輪駆動、一定の差動ロック(すべての車輪が同時に回転する)、および一定の「低速ギア」があります。 つまり 彼は比較的ゆっくりと運転しますが、力強く無難です。
Virtualrilkiの構成
マシンを組み立てる前に、Virtualrilkaを構成する必要があります。 まず、Wi-Fi接続オプションを検討します。
だから、ポイントで:
- 特にfilesboard.virt2real.ru/firmware/virt2real-board/1.1/rcboard-0.01.002.zipの最新ファームウェアをダウンロードします
- Micro-USB-USBケーブルをVirtrilkaに接続し、もう一方の端をコンピューターに差し込みます。 新しいネットワークインターフェイスがコンピューター、192.168.3.0 / 24サブネットに表示されます。 Windowsの場合、 ドライバーのインストールが必要になる場合があります。
- アドレスhttp://192.168.3.1/adminで基本的な管理パネル(Virtualrilkaを管理するためのWebパネル)を開きます
- [設定]-> [ネットワーク]セクションに移動し、wlan0インターフェイスのIPを設定します(または静的IPが不要な場合はdhcpを指定します)
- [設定]-> [Wi-Fi]-> [Wi-Fi設定]セクションに移動し、最初のネットワークのワイヤレスネットワークパラメーターを設定します(ssidフィールドとpskフィールドを変更します)
- [設定]-> [自動起動]セクションに移動します-S80dhcp-serverスクリプトを非アクティブに移動します(USBを介した初期設定が不要になった場合)
- [管理]-> [再起動]セクションに移動し、Virtualkaを再構築します
- VirtualrilkaからUSBケーブルを外し、ホイッスルをmicro-USB wifiに接続します。 推奨されるもののうち、ASUS N10、N13、TP-link TL-WM722Nをお勧めしますが、ASUS N53やDlink DWA-160 rev.B2などの5 GHzのものが最適です
Virtualrilkaのネットワークへの接続の確認
- Virtrilkiをロードするプロセスで、その上のLEDが点灯します。 電源がオンになったときに、起動可能なUSBフラッシュドライブが正常に読み取られると、緑色のLEDが点灯します。 次に、カーネルをロードするプロセスで、青色のLEDが点灯します。 完全にダウンロードした後、Wi-Fiネットワークへの接続が成功すると、赤色のLEDが点灯します。 そして、制御ボードが起動すると(自動実行に登録されます)、すべてのLEDが消え、赤いLEDが点滅し始めます)。
- 管理アプリケーションをインストールします。 Virt2real Playerと呼ばれ、Windows( ディストリビューションまたはzipアーカイブ )、 Android 、 IOS向けです。 アプリストアのIOSアプリケーションはまだ古いバージョンであり、新しいものは承認を通過します。したがって、今のところ、それを無意味にすると、管理は不器用に動作します。
- VirtualrilkaがWi-Fiを介してローカルネットワークに正常に接続した場合、エクスプローラー(Windowsコンピューターの場合)を開きます-[ネットワーク]セクションに、デバイス「RCboard(Virt2real)」が表示されます。 このデバイスを右クリックしてメニュー項目「デバイスのWebページを表示」を選択すると、管理パネルにアクセスできます
- Windows用またはAndroid用のVirt2real Playerを起動すると、RCboardサーバーが検出されます。 iOSアプリケーションでのサーバー検出はまだ実装されていません。
Windows用Virt2real Playerのスクリーンショット
Android用スクリーンショットVirt2real Player
機械のモーターを接続する一般的な原則
通常、RC車には2つのモーターがあります。 普通のコレクター-車輪を回します。 2つ目はサーボモーターで、前輪を正しい方向に回転させます。 つまり 必要なのは、ガスとステアリングホイールの2つの制御チャネルだけです。 当初(機械を組み立てて購入した場合)、すべてのチャネルは3ピンJRコネクタ(標準サーボコネクタ)で標準無線に接続されます。 黒(または茶色)ワイヤ-アース、赤-電源(5-6V)、黄色(または白、またはオレンジ)-信号ワイヤ。
信号線を介してモーターを制御しますが、最初に車輪を駆動するサーボに電力を供給する必要があります。 ここでの一般的な原則は次のとおりです。オンボードバッテリーから、バッテリーの電圧に等しい電圧の電源が太いワイヤーを介してコレクター(またはブラシレス)モーターの強力なレギュレーターに送られます。 このレギュレーターには、いわゆるBECがあります。これは、オンボードサーボ、レシーバー、その他のさまざまな電子機器に電力を供給するために必要なさまざまなバッテリー電圧から、安定した5ボルト(時には6V、レギュレーターのジャンパーを選択できます)を安定させる電圧コンバーターです。 この安定化電源は通常、2〜3Aの負荷用に設計されていますが、これはレギュレータのモデルにも依存します。
レギュレーターからの細い3線ループの黒線と赤線を介したBECの出力電圧が受信機に供給されます。 ここに、誰もがすぐに理解できるわけではないという主なニュアンスがあります。 繰り返します-レギュレーターからの3本のワイヤーが付いたケーブルがあります。 これらのうち、2つのコアは電力であり、レギュレーターから発行されます。 これが出口です。 そして、3番目のワイヤ(白、黄色、またはオレンジ)は制御ワイヤです。 入り口。 些細なことのように思えますが、何らかの理由で多くの人が混乱しています。
受信機には、3ピン接点のグループがいくつかあります。 それらの数は、受信機が設計されているチャネルの数に依存します。 通常、マシンには2つまたは3つのチャネルがあるため、それぞれグループ3または4(ペアジャンパー(レシーバーとトランスミッターをペアリングするための信号)を設定するための1つのグループ)。これらの接点グループでは、すべての電源ピンが互いに閉じています。電力はレギュレータから供給され、すべての接点グループにすぐに供給されますが、信号ピンはすべて独立しており、無線制御装置から受信機が受信した信号を受信します。
独立したコントローラーを使用して管理するため、マシンのネイティブレシーバーは不要であり、完全に削除します。 そして、コントローラーとサーボからの3コアループをトリッキーな方法で接続する必要があります-黒のワイヤを黒に、赤を赤に接続します。 そして、残りの白(黄色またはオレンジ)の2本のワイヤをVirtrilkaに、つまりピンCON44とCON43に接続する必要があります。
図を参照してください 。 チャネルは構成ボードで後から構成できるため、どのワイヤにどのピンを接続してもかまいません。
このようなものを取得する必要があります。
手元にサーボエクステンダーがある場合-彼らの助けを借りて接続するのが便利です。 私は彼らに永遠の緊張があるので、ワイヤーとツイストはんだを切断します。
そして、はい、最も重要なことは、バッテリー接点からVirtualrilkaに直接電力を供給することです。 彼女は20Vまでの電圧を恐れていないので、電圧が高いほど消費電流は少なくなります。 電力変換器(SEPIC、Virtrilka自体にインストールされている)の効率は15V後に低下するため、理想的な電源は12から15 Vであり、全負荷(wifi使用時)でVirtrilkaは約150-300 mAを消費します。 これはホイッスルにも依存します(ヨータのホイッスルは非常に貪欲ですが、それ以上になります)。
機械組立
クローラーのビルドプロセスのビデオを撮影しようとしました。 すべてがどれほど明確かはわかりませんが、それが無駄になるとは思いません。 アセンブリに関するビデオを次に示します。
サーバーボードを構成する
コントロールボードのすべての設定は、コントロールボードの特別なコントロールパネルで編集できます(Virtualrilkiの管理パネルと混同しないでください)。 これがコントロールパネルの外観です(最初のバージョン)
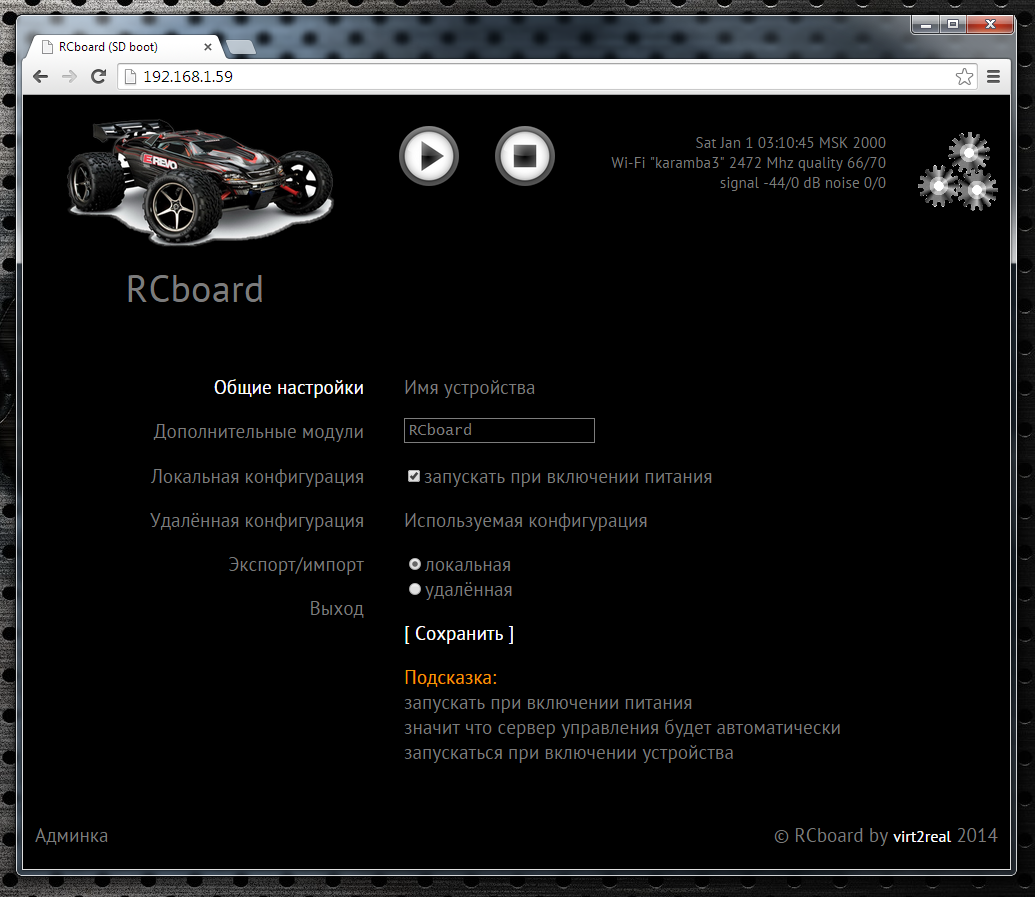
[全般設定]タブでは、デバイスの名前(アプリケーションでデバイスが検出されたときに表示される)を設定し、Virtualkaをロードするときにサーバーボードを自動的に起動するかどうかを指定します。
構成はローカルにすることができます(つまり、構成ファイルは常にカタログディレクトリに配置され、コントロールパネルで編集できます)。または、ボードがWebサーバーから起動されるたびに構成ファイルがダウンロードされるときに削除できます。
リモート構成サーバー(デフォルトでは
http://rc.virt2real.ru/getconfig )は、
forum.virt2real.ruフォーラムの登録ユーザーのみが構成を作成および編集できます。
このトピックでは、ローカル構成についてのみ説明します。興味がある場合は、リモートで自分で試すことができます。 ところで、深Shenzhenのタイプライターで運転していたとき(トピックの最後のビデオ)、設定を変更できるようにリモート構成を使用しました。 アプリケーションから設定を変更することはまだスケッチの形であり、実際にはまだ機能しませんが、それを終了しても、リモート設定は依然として便利です。
そのため、「ローカル構成」タブは、今私たちにとって最も興味深いものです。 一般に、デフォルトの設定ではすでにサーバーモードでボードが設定されています。マシンを接続し、ローカルで管理できます(ローカルネットワーク、Windowsアプリケーション、AndroidまたはiPhone-iPadから)。 チャネルを交換する必要がある場合を除きます。 ただし、P2P(ピアツーピア)モードの場合、インターネット経由で制御するには、設定を変更する必要があります。
デフォルトでは、universal.soライブラリはすべての制御を担当します。そのパラメーターは、構成の最後の「[universal]」セクションにあります。
制御チャンネルとPWM / PPMチャンネルの対応は、軸パラメーターによって設定されます。
軸= 0,1,2,3
デフォルトでは、CON43、CON44、CON19、CON42の4つのPPMチャネルが構成されています。 構成のこれらの行は、これに責任があります
ch0 = 43、ppm、500、1500、2500、127、0
ch1 = 44、ppm、500、1500、2500、127、0
ch2 = 19、ppm、500、1500、2500、127、1
ch3 = 42、ppm、500、1500、2500、127、1
チャネル設定の形式は次のとおりです。
chX = CON、TYPE、MIN、CENTER、MAX、NEUTRAL、NOAUTOCENTERどこで
X-チャネル番号PWM / PPM、0〜3
CON-ピン番号(GPIOではなくピン、
図を参照 )
TYPE-信号タイプ、ppmまたはpwm。 マシンではppmが必要ですが、pwmでは別の設定行形式を入力します。
MIN-ミリ秒単位のPPM信号の最小位置。
MAX -PPM信号の最大位置(ミリ秒単位)。
CENTERは、ミリ秒単位のPPM信号の中心位置です。
NEUTRAL-相対中立値、つまり 制御コマンドの中立的な意味。 通常= 127
NOAUTOCENTER -if = 0-信号を自動的に中央位置に戻します= 1-戻らない 機械のガスチャンネルとステアリングホイールの場合、0を指定する必要があります。表示カメラの回転に使用されるサーボのチャンネルの場合、1を指定する必要があります(もちろん)
ヘッドライトがマシン上にある場合、それらをオンまたはオフにできます。単純なトランジスタアンプ(実際には1つのフィールドトランジスタ)を組み立てる必要があります。 制御信号を取得するには、pinsパラメーターを使用します。 Virt2real Playerで(画面上のボタン、キーボード、マウス、またはゲームパッドで)ボタンが押されたときに0または1に設定されるピンを設定します。
ピン= 1.30.0.0 | 2.31.0.1
形式は次のとおりです。
ピン= CHANNEL、CON、DEFVALUE、SAVESTATE | ...どこで
CHANNEL-ボタンチャンネル(
1〜32 )
CON-ボタンから制御コマンドを受信すると0または1に設定されるピン番号
DEFVALUE-ワードボードの起動時にこのピンに設定される値
SAVESTATE -if = 0-ボタンを押すとき、ピンを1に設定します。リリースするとき-0に設定します。= 1 =-ボタンを押すとき、ピンを1に設定します。 次回ボタンを押すときは、ピンを0に設定し、離すと何もしません。 そして、ループで。
ボタンチャネルは、セパレータ「|」を使用して連続して指定できます。
このあいまいな情報からの簡単な結論-ガスとステアリングチャネルが混在している場合-軸パラメーターをaxis = 1,0,2,3に変更することでそれらを交換できます:-)
ステアリングサーボの極端な位置を制限する必要がある場合は、目的のチャネルのMIN値とMAX値を変更します。 機械がニュートラル位置で前後に移動する場合は、目的のチャネルのCENTER値を変更します。
追加モジュール
「追加モジュール」タブには、アクティブおよび非アクティブのモジュールボードのリストがあります。

モジュールは、通常はテレメトリソースとして機能する別個のアプリケーション(実行可能バイナリ)です。 アクティブなモジュールは、ワードボードの開始時に自動的に開始され、終了すると終了するモジュールです。 コントロールパネルでは、オレンジ色の矢印をクリックして、ある列から別の列にモジュールを移動できます。 アクティブな列に移動すると、ボードが実行されているかどうかに関係なく、モジュールがすぐに起動します。 非アクティブに移行すると、モジュールは自動的に動作を停止します。
モジュールは単純に動作します-必要なパラメーターを読み取り、設定で指定されたローカルポート(ext_telemetry)にUDP経由で送信します。 そして、rtsbordaはすでにOldを受け入れ、テレメトリチャネルを介してアプリケーションVirt2real Playerに送信します。 同時に、アプリケーションが情報を分析し、その目的に使用できるように、同じ情報がデバイスのユーザーライブラリ(この場合はuniversal.so)に送信されます。 たとえば、autobot.soというデバイスのライブラリがありました。これは、ユーザーによる制御に加えて、超音波距離計からの信号によって誘導される自律走行可能な制御トロリーです。
メインモジュールのうち、statuswifiは、RCボードへのwifiリンクのステータスに関する情報を提供します。 Airosstatus.php(はい、モジュールはスティックに書き込むこともできます)-Ubiquity機器、gpsからリンクのステータスを読み取ります-GPS受信機を読み取ります。 imuモジュールは、慣性センサー(オイラー角、方位角、コンパスを形成)からの情報を処理しますが、現在は1つのタイプのセンサーでのみ動作するため、普遍的な使用には適していません。 Nfc-NFCタグを読み取りますが、1種類のリーダーでのみ動作します。 rc.in-RC受信機からPPM信号を読み取ります。 マシンは通常のアプリからも制御でき、wifi経由の制御コマンドよりも優先されます。 rfid-RFIDタグを読み取ります。 statusyota-Yotaモデムの4Gリンクのステータスを読み取ります。 usrange-超音波距離計の測定値を読み取ります。 電圧-サイドの供給電圧を決定します。ADC0に接続するには単純な分圧器(2つの抵抗)が必要です。 一般に、多くの興味深いモジュールがあり、それぞれに詳細な説明がありますので、今のところ、私はシードについてそれらに言及したと思います:-)
制御された車のレシピでは、Wi-Fiまたはstatusyotaを介して接続をセットアップする場合-VirtualkaをYotaホイッスルで接続する場合、statuswifiモジュールが関連します。
アプリケーション設定
AndroidおよびiPad-iPhoneアプリケーションでは、設定は簡単で、選択できるのは制御チャネルのみです。 Androidでは、ボタンのチャンネルも選択できます(デフォルトでは、チャンネルは設定されず、ボタンは表示されません)。 しかし、Windowsアプリケーションでは、すべてを文書化する必要があることに気付いたときに、私自身がパニック状態に陥るほど多くの機能をひねりました。 これまでのところ、アプリケーションの以前のバージョンの説明へのリンクのみを提供できます
http://wiki.virt2real.ru/wiki/How_Make_Managed_Cart_2http://wiki.virt2real.ru/wiki/RCboardその後、制御プロトコルは著しく変更されましたが、Windowsアプリケーションの構成はそれほど変更されていないため、ピッキングに役立ちます。 来年の現在のバージョンの詳細な説明を書きます:-)
ちなみに、初期のバージョンでは、テレメトリの送信にMAVLINKプロトコルを使用していましたが、機能でファウルが発生したため、見落とされ始めたため、プロトコルに切り替えました。 そして、私はMAVLINKをパラレルテレメトリチャネルとして追加することを考えていますが、これはすでにアプリケーションの次のバージョンに含まれています。
1つだけお伝えします。USBステアリングホイールとペダルをコンピューターに接続してマシンを制御するのが最善です。 まあ、または少なくとも、コーチングコネクタによってコンピューターに接続されたRCアプリでは。 そして、スマートフォンの画面上の指は涼しいかもしれませんが、nifigaは触覚なしでは便利ではありません。
そして今、最も重要なことはインターネットガバナンスです
P2Pモードに関する紹介情報
UDPは制御チャネルとビデオチャネルに使用されるため、ボードからサーバーにビデオを送信してクライアントに戻らないように、本格的なP2P(ピアツーピア)リンクを作成したかったのです。 まあ、もし望むなら、私はそれを取り、それをしました:-)実際、それはAdobe RTMFPのシンプルで簡単な類似物であることが判明しました(RTMPと混同しないでください)。 ここでのみ、音声伝送を追加することはできません。そのため、ボードはまだミュートで耳が聞こえません。
UDPでは、主な問題は何ですか-NATブリッジング。 リンクの一方の端(送信側または受信側)には必ずNATが存在するため、サーバー(またはクライアント)のアドレスとポートを指定するだけでは機能しません-NATは干渉します。 Windows Virt2real Playerでは、UPnPを使用してポートを転送することができますが、これは私が望んでいたものではありません。 そして、私が望んでいたことは、
UDPホールパンチングテクノロジーの思慮深い喫煙の後で初めて判明しました。 その結果、どのルーターでも、クライアントやサーバーの場所に関係なく、すべてが正常に機能しました。 主なことは、インターネットにアクセスできるようにすることです。 嘘をついていますが、まだ突破できていないNATが1つあります。 対称NATのように正しく呼び出される方法を忘れてしまいます。
はい、通常のTURNおよびSTUNサーバーはボードでは使用されず、独自の実装のみが使用されます。 私がよく言うように、テクノロジーを学びたいなら、自分のやり方でそれをして、それを一般に受け入れられているソリューションと比較してください。 自転車愛好家は私を理解します。 ただし、自転車はそれほど悪くはなく、一般に受け入れられている決定よりもタスクを実行しやすいことが判明します。
これはそうです、簡単なオフトピックがありました。 NATについては続けます。 P2Pのサポートは、これまでのところWindowsアプリケーションVirt2real Playerでのみ行われており、AndroidおよびiPhone-iPadにはまだ追加されていません。 私は、Yotaホイッスル、Beeline 4Gホイッスル、スマートフォンのアクセスポイント、さらにBeeline 4G経由でインターネットに接続した接続を使用して作業を確認しました。 これらのすべての場合、すべてが機能しますが、Yotaを介してのみ理想的であることがわかりました。 ビーライン(テストされたいずれかのタイプ)でも機能しますが、接続に時間がかかります。 これが起こる理由-私がそれを理解するまで。 悲しいことに-これまでのところ、クライアントとサーバーの両方が4Gホイッスルを介して接続されている場合、リンク(コマンドとビデオの両方)を機能させることはできませんでした。 おそらくここでは、対称型NATだけが忍び寄っています。
P2Pモードのセットアップ、Wi-Fiはオンボードです
Wi-Fiホイッスルは、マシンに搭載されているVirtualrilkaに接続されています(つまり、このトピックの指示に従ってこれまで行われたように)。 最初はマシンをローカルで制御しただけで、今度はインターネットから誰かを誘導することができます。
p2pモードを有効にするには、コントロールパネルのWebボードの「ローカル設定」セクションに移動します。 そこでパラメータを設定します
役割= p2p
ここで、パラメータp2p_uidおよびp2p_hashを設定する必要があります。 これは一種のログインパスワードの類似物ですが、まだ本格的な承認はありません(ただし、必要です)ので、このような束を使用します。 p2p_uidはrc.virt2real.ru/remoteconfigのアカウントから取得した方が「ユーザーID」と呼ばれ、
招待メカニズムが機能します(詳細は以下を参照)。 また、p2p_hashは独立して開発する必要があります。 最大40文字の任意の文字セット。
rzboardsモードのp2p設定はこれで終わりです。 Virtualrilkaがインターネットにアクセスできることと、Virt2real Player Windowsを実行できることを確認する必要があります。 ボードと同じ場所でローカルネットワーク上で実行すると、プレーヤーはローカルボードを検出し(p2pモードであることは関係ありません)、直接接続できます。 ただし、プレーヤーが別のネットワークで実行されている場合は、p2pモードで構成する必要があります。
プレーヤーのウィンドウを右クリックし、[ネットワーク]メニュー-> [ネットワーク設定]に移動します。 [ロール]タブで[P2P]を選択し、[P2P]タブでUIDとDevIDを指定します。 UIDは、ボードが設定に入力したものと同じp2p_uidであり、DevIDはそのp2p_hashです。 保存して、もう一度ビデオウィンドウを右クリックし、[ネットワーク]-> [接続]をクリックします。 プレーヤーの左下隅に、「ピアビデオをリクエスト」および「ピアコマンドをリクエスト」というメッセージが表示されます。 これで、ごちそうとペアリングを検出するプロセスが開始されました。
メッセージが表示されない場合があります。プレーヤーを再起動する方が良いでしょう(私のわんわん、まだキャッチしていません)。開始すると、すぐに設定したパラメーターに接続し始めます。 P2Pモード。
前述のニュアンスから-プレーヤーがYotaを介してオンラインになるコンピューターで起動された場合-接続はすぐにインストールされます。 もちろん、イオタに通常の信号がある場合。 ただし、Yotaルーターまたは4Gを介してBeelineからホイッスルを鳴らした場合、最初の接続は最大1分間続きます。 しかし、その後のすべてのものはほぼ瞬時になります。 私はどこでめちゃくちゃになったかは知っていますが、手が届くまで修正します。
P2Pモードのセットアップ、Yotaはオンボードです
Yotaのホイッスルを(もちろんUSB-OTGアダプター経由で)マシンに搭載されているVirtualrilkaのマイクロUSBポートに接続します。 現在ヨータで販売されているホイッスル
それ以外の場合、すべては前の段落と同様です。 「追加モジュール」セクションの「設定」セクションのアクティブスクリプトからstatuswifiモジュールを削除すると、プレーヤーのYota信号パラメーターを確認するために、アクティブスクリプトにstatusyotaモジュールを配置できます。
さまざまなタイプの接続の図
残念ながら、自宅ではヨータはかろうじて毛が生えているため、完全に乗ることはできません。 ただし、Beeline 4Gは問題なく動作し、3メガビットストリーム(着信と発信の両方)が問題なく動作します。
以下のすべての実験では、すべての設定は同じであり、接続のタイプのみが変更されます。
Wi-Fiウィスラークローラー、Yota経由のインターネット接続 自宅のLANから接続するYotaホイッスルクローラー。 ヨータ信号は非常に悪いです:-( スマートフォン経由でインターネットにアクセスできるラップトップからのWi-Fiホイッスル付きのクローラー(Beeline 4G) 招待
パラメーターを誰かに転送してP2Pモードでタイプライターに接続しやすくするために、招待メカニズムに関するいくつかの提案が作成されました。招待とは何ですか-誰もが知っています。便利なこと。それでは、使用方法を説明してみましょう。プレーヤーでは、これはまだテスト済みの未加工の形式ですが、機能しているようです。したがって、Windows Virt2real Playerを開き、ウィンドウを右クリックして、[招待]-> [招待の作成]を選択します。重要なニュアンス-プレーヤーはP2Pモード、つまりネットワーク設定では、マシンに接続するための上記のすべてのパラメーターが示されています。そうでない場合、招待が作成されますが、接続するものは何もありません。ところで、パラメータが入力されていない場合は、警告を追加する必要があります。フィールド「Your user ID」に、すべて同じp2p_uidを入力します。フィールド「Your user-magic」に、同じページのフィールド「Your user-magic」の内容を入力しますrc.virt2real.ru/remoteconfig「Invitationof Name」フィールドに、この招待がページrc.virt2real.ruに表示される名前を入力します。 / remoteconfigが表示されます。[招待の作成]ボタンをクリックします。 tweak-logoが回転し、その後、INVの文字で始まる下のフィールド「Line-invite」に長い行が表示されます。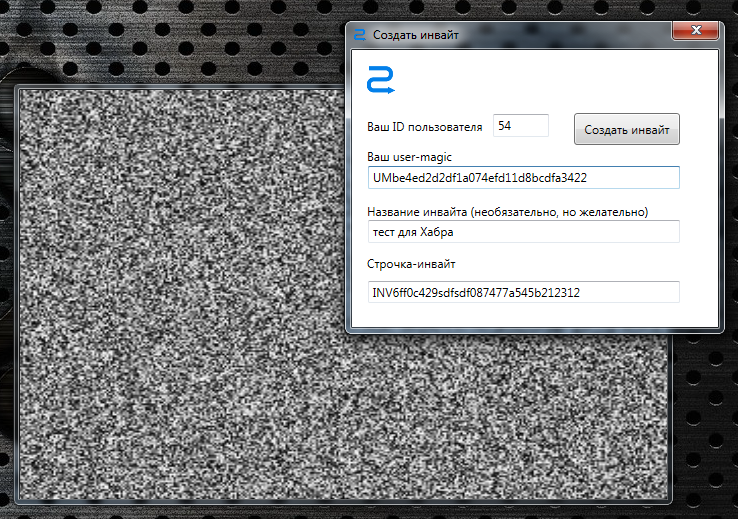 ここで、リモート構成ページrc.virt2real.ru/remoteconfigを開くと、作成した招待が表示されていることがわかります
ここで、リモート構成ページrc.virt2real.ru/remoteconfigを開くと、作成した招待が表示されていることがわかります さて、それからただこの線を乗りたい人に落としてください。そして彼は、プレイヤーメニューの[招待]-> [招待があります!]に移動し、この行に入ります。その後、必要なパラメータはすべて自動的に入力されます。接続するために何も設定する必要はありません。すぐに乗ることができます。私が言ったように、システムは湿っていますが、それは動作します。計画では、ログインパスワードによる通常の承認を行うことで、ユーザーのメジャーやその他の識別子に煩わされる必要がなくなります。
さて、それからただこの線を乗りたい人に落としてください。そして彼は、プレイヤーメニューの[招待]-> [招待があります!]に移動し、この行に入ります。その後、必要なパラメータはすべて自動的に入力されます。接続するために何も設定する必要はありません。すぐに乗ることができます。私が言ったように、システムは湿っていますが、それは動作します。計画では、ログインパスワードによる通常の承認を行うことで、ユーザーのメジャーやその他の識別子に煩わされる必要がなくなります。遅延について少し
リモートコントロールの主な要件は1つです。ボタンを押したり、ジョイスティックを動かしたりして、ビデオストリームでデバイスに搭載されている画像の対応する変更までの遅延を最小限にします。リモートコントロールについて何かを公開するとき、最初の質問は通常「遅延とは何ですか?」です。多数のテストの結果、遅延は主観的なものであり、さまざまな方法で制御の快適さに影響することが判明しました。もちろん、それはすべて駆動装置の最大速度に依存します。飛行デバイス(飛行機/ヘリコプター)の場合、最小遅延は非常に重要ですが、駆動デバイスを制御する場合は常にではありません。改造されたラジコンバギーに関する次のホビーエキスポの展示会でホールを切り開いたとき、10分間のタキシング後、遅延が(それが何であれ)感じられなくなると思い込んで、「事前に」制御し始めました。ほぼ半分の速度で(そして私のバギーは時速80 kmに加速できます)、彼は静かにホールを走り回り、パビリオン、椅子、人々の間を移動しました。したがって、ここでは、ミリ秒単位の絶対値よりも遅延の安定性が重要です。通常のWi-Fiホイッスルを介して通常のルーターに接続する場合に達成される最小遅延は約200ミリ秒であり、一般に認識されている標準を介して接続する場合、強力なUbiquityルーターは確実な接続で最小遅延が約100ミリ秒でした。遅延は、ビデオストリーム再生デバイス(PC、スマートフォン)のパワーにも影響されます。生のビデオストリーム(H264コーデック)をデコードする時間がない場合、快適でスムーズなビデオはありません。モスクワの自宅に座って深センでかなり高速のバギーを走らせたとき、操縦するのは非常に快適でしたが、私から中国の4Gオペレータのサーバーへのネットワークpingは約300ミリ秒でした。さらに、さらに100ミリ秒-合計で0.5秒間実行されます。しかし、素晴らしい乗り心地:-)4G通信のニュアンス
飛行機で飛んでいるときに激しい落下の後、我々は問題が何であるかを理解しました。接続が4G経由の場合、mtuパラメーターを1322以下に設定する必要があります。それほど必要ありません。mtu= 1322に設定し、心配する必要はありません。ローカルネットワークでは、通常16,000(ジャンボフレームの最大サイズ)を設定します。LANでは正常に動作しますが、インターネット上では既にパケットの通過に問題があります。参照資料
テキストが2桁を超えていることが判明したため、メインリンクを繰り返します。Windows用VirtrilkaVirt2real Player配布キットのファームウェアrcboard-0.01.002.zip。同じことですが、インストーラーではなく、単なるアーカイブWin8では、DirectXが誤ってチェックされるため、アーカイブを単純に解凍できます。.Net 4.5およびDirectXが必要です。RCboardsおよびVirt2real Playerの以前のバージョンの説明RCboardsの別の説明、古いプロトコルAndroidアプリケーション。ローカル管理のみ。IOSアプリ、ローカル管理のみ、デバイス検出なし。現在、古いバージョンがありますが、新しいバージョンではアプリが開発されています。PS Ehh、ごめんなさいBond Wheelbarrowはボードの外観まで生きていませんでした:-(